Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Upes School of Law Lac & Adr Association: PresentsDokument7 SeitenUpes School of Law Lac & Adr Association: PresentsSuvedhya ReddyNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Kapinga Kamwalye Conservancy ReleaseDokument5 SeitenKapinga Kamwalye Conservancy ReleaseRob ParkerNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Math Review CompilationDokument9 SeitenMath Review CompilationJessa Laika CastardoNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Retail Banking Black BookDokument95 SeitenRetail Banking Black Bookomprakash shindeNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Basic Econometrics Questions and AnswersDokument3 SeitenBasic Econometrics Questions and AnswersRutendo TarabukuNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- What Is Universe?Dokument19 SeitenWhat Is Universe?Ruben M. VerdidaNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Introduction To BiogasDokument5 SeitenIntroduction To BiogasLouis EldertardNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Ci Thai RiceDokument4 SeitenCi Thai RiceMakkah Madina riceNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Introduction To Retail LoansDokument2 SeitenIntroduction To Retail LoansSameer ShahNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- All Day Breakfast: .Served With Cappuccino or Espresso or Lime Juice or TeaDokument7 SeitenAll Day Breakfast: .Served With Cappuccino or Espresso or Lime Juice or TeaBryan KuoKyNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Aditya Birla GroupDokument21 SeitenAditya Birla GroupNarendra ThummarNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- ALE Manual For LaserScope Arc Lamp Power SupplyDokument34 SeitenALE Manual For LaserScope Arc Lamp Power SupplyKen DizzeruNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Chemistry Investigatory Project (R)Dokument23 SeitenChemistry Investigatory Project (R)BhagyashreeNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- How To Launch Remix OS For PCDokument2 SeitenHow To Launch Remix OS For PCfloapaaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- DFo 2 1Dokument15 SeitenDFo 2 1Donna HernandezNoch keine Bewertungen
- PE MELCs Grade 3Dokument4 SeitenPE MELCs Grade 3MARISSA BERNALDONoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Not A Toy Sample PDFDokument37 SeitenNot A Toy Sample PDFMartha Paola CorralesNoch keine Bewertungen
- The Mane Reason - UNDERSTANDING CONSUMER BEHAVIOUR TOWARDS NATURAL HAIR PRODUCTS IN GHANADokument68 SeitenThe Mane Reason - UNDERSTANDING CONSUMER BEHAVIOUR TOWARDS NATURAL HAIR PRODUCTS IN GHANAYehowadah OddoyeNoch keine Bewertungen
- QP 12math Term 1Dokument11 SeitenQP 12math Term 1sarthakNoch keine Bewertungen
- Low Budget Music Promotion and PublicityDokument41 SeitenLow Budget Music Promotion and PublicityFola Folayan100% (3)
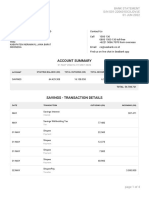
- Account Statement 250820 240920 PDFDokument2 SeitenAccount Statement 250820 240920 PDFUnknown100% (1)
- Seabank Statement 20220726Dokument4 SeitenSeabank Statement 20220726Alesa WahabappNoch keine Bewertungen
- CLG418 (Dcec) PM 201409022-EnDokument1.143 SeitenCLG418 (Dcec) PM 201409022-EnMauricio WijayaNoch keine Bewertungen
- Toh MFS8B 98B 003-11114-3AG1 PDFDokument92 SeitenToh MFS8B 98B 003-11114-3AG1 PDFDmitry NemtsoffNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- 1 Bacterial DeseaseDokument108 Seiten1 Bacterial DeseasechachaNoch keine Bewertungen
- Prospekt Puk U5 en Mail 1185Dokument8 SeitenProspekt Puk U5 en Mail 1185sakthivelNoch keine Bewertungen
- 385C Waw1-Up PDFDokument4 Seiten385C Waw1-Up PDFJUNA RUSANDI SNoch keine Bewertungen
- Marketing Channels: A Strategic Tool of Growing Importance For The Next MillenniumDokument59 SeitenMarketing Channels: A Strategic Tool of Growing Importance For The Next MillenniumAnonymous ibmeej9Noch keine Bewertungen
- Project Formulation and Appraisalpdf PDFDokument12 SeitenProject Formulation and Appraisalpdf PDFabhijeet varadeNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Asterisk NowDokument82 SeitenAsterisk Nowkambojk100% (1)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)