Das könnte Ihnen auch gefallen
- D. Michael Quinn-Same-Sex Dynamics Among Nineteenth-Century Americans - A MORMON EXAMPLE-University of Illinois Press (2001)Dokument500 SeitenD. Michael Quinn-Same-Sex Dynamics Among Nineteenth-Century Americans - A MORMON EXAMPLE-University of Illinois Press (2001)xavirreta100% (3)
- Design and Analysis of Globoidal Cam Index DriveDokument6 SeitenDesign and Analysis of Globoidal Cam Index DriveijsretNoch keine Bewertungen
- Train Coupler Longitudinal Effect 13Dokument22 SeitenTrain Coupler Longitudinal Effect 13Chuck LiddellNoch keine Bewertungen
- Test Bank For Cognitive Psychology Connecting Mind Research and Everyday Experience 3rd Edition e Bruce GoldsteinDokument24 SeitenTest Bank For Cognitive Psychology Connecting Mind Research and Everyday Experience 3rd Edition e Bruce GoldsteinMichaelThomasyqdi100% (49)
- Cams SynthesisDokument36 SeitenCams SynthesisShinchanus Monyetus GeblekusNoch keine Bewertungen
- BY Daniel .HDokument49 SeitenBY Daniel .Hdaniel hambissaNoch keine Bewertungen
- Cams & Followers: ME 323 / 321 D Machine Elements 2 Prepared By: A. RecachoDokument49 SeitenCams & Followers: ME 323 / 321 D Machine Elements 2 Prepared By: A. RecachoMark Angelo Uy0% (1)
- CamDokument38 SeitenCamEbrahim HanashNoch keine Bewertungen
- MECH 412 Dynamics and Control Systems Lab: Cam Analysis ExperimentDokument17 SeitenMECH 412 Dynamics and Control Systems Lab: Cam Analysis ExperimentMohammad TahirNoch keine Bewertungen
- Design and Analysis of Indexing Cam Mechanism WithDokument11 SeitenDesign and Analysis of Indexing Cam Mechanism WithDragan KrsticNoch keine Bewertungen
- Cam TutorialDokument26 SeitenCam Tutorialtechnology firstNoch keine Bewertungen
- Operating Manual of MultiheadDokument62 SeitenOperating Manual of MultiheadEdwin CatariNoch keine Bewertungen
- Study On The Cam Profile Used in Various Manufacturing MachinesDokument15 SeitenStudy On The Cam Profile Used in Various Manufacturing MachinesHazrat BelalNoch keine Bewertungen
- Microcontroller Based Multihead WeigherDokument6 SeitenMicrocontroller Based Multihead Weigherazat OrazowNoch keine Bewertungen
- Cam ViceDokument50 SeitenCam ViceAakash Dindigul100% (1)
- Article 51Dokument5 SeitenArticle 51azat OrazowNoch keine Bewertungen
- Chapter-5 Steam TurbineDokument26 SeitenChapter-5 Steam Turbinehadush gebreNoch keine Bewertungen
- SlotantennaDokument52 SeitenSlotantennaCristhian CarrilloNoch keine Bewertungen
- Tilting and Angle ViceDokument36 SeitenTilting and Angle ViceBoopathi KalaiNoch keine Bewertungen
- CAM ProfilesDokument20 SeitenCAM ProfilesDheerLakhotiaNoch keine Bewertungen
- Bearing (Mechanical)Dokument9 SeitenBearing (Mechanical)Khor Tze MingNoch keine Bewertungen
- Autocad 2d NotesDokument33 SeitenAutocad 2d NotesGudapati PrasadNoch keine Bewertungen
- Unit 4 CADDokument45 SeitenUnit 4 CADiampiyushsahuNoch keine Bewertungen
- Me III II DMM II LnotesDokument33 SeitenMe III II DMM II LnotesChandu MallamNoch keine Bewertungen
- MSD PPT Powerpoint PresentationDokument11 SeitenMSD PPT Powerpoint PresentationSachin KumbharNoch keine Bewertungen
- Angle and Tilting Vice - SynopsisDokument6 SeitenAngle and Tilting Vice - SynopsisTanvi Khurana100% (3)
- Cam Vice ReportDokument52 SeitenCam Vice ReportAnonymous rvhOrVmmbNoch keine Bewertungen
- Row-Column Designs: January 2001Dokument10 SeitenRow-Column Designs: January 2001Nanmita SinghNoch keine Bewertungen
- Chapt8 Sprinklerirrigationsystem PDFDokument15 SeitenChapt8 Sprinklerirrigationsystem PDFgladNoch keine Bewertungen
- L27 - The Brayton CycleDokument12 SeitenL27 - The Brayton CycleHaliunaa BatboldNoch keine Bewertungen
- Moment Inertia PDFDokument18 SeitenMoment Inertia PDFSameOldHatNoch keine Bewertungen
- Assesment Procedure: By: Smriti KhannaDokument25 SeitenAssesment Procedure: By: Smriti KhannaSmriti KhannaNoch keine Bewertungen
- Bell CrankDokument5 SeitenBell CrankRajuKumarNoch keine Bewertungen
- PneumaticsDokument34 SeitenPneumaticsLohath Unique67% (3)
- Answer On Question #11567-Physics-Molecular Physics-ThermodynamicsDokument3 SeitenAnswer On Question #11567-Physics-Molecular Physics-ThermodynamicsMuhammad Haris KhattakNoch keine Bewertungen
- 1.1 Background of The StudyDokument12 Seiten1.1 Background of The StudyStephen DuamorNoch keine Bewertungen
- PDF BRIEF Form 3.0 PDFDokument1 SeitePDF BRIEF Form 3.0 PDFDynar Anjani50% (2)
- CAMSDokument35 SeitenCAMSAnurag JenaNoch keine Bewertungen
- ME360 Chapter 5 CamsDokument44 SeitenME360 Chapter 5 CamsmangyanNoch keine Bewertungen
- Cams PDFDokument20 SeitenCams PDFDhanan JayNoch keine Bewertungen
- Unit6 CAMSDokument27 SeitenUnit6 CAMSGokulraju RangasamyNoch keine Bewertungen
- ME352 Lecture 4 CamsDokument43 SeitenME352 Lecture 4 CamsRaghav GaneshNoch keine Bewertungen
- Class Work 1: SectioningDokument6 SeitenClass Work 1: Sectioningjoseph olojaNoch keine Bewertungen
- Kinematics of Machines Mee215 Winter 2010-2011 Topic: Cam Follower AnalysisDokument40 SeitenKinematics of Machines Mee215 Winter 2010-2011 Topic: Cam Follower AnalysisAnanda Babu ArumugamNoch keine Bewertungen
- Kinematics of Machinery (EME 202) CamsDokument25 SeitenKinematics of Machinery (EME 202) Camshitaishi5599Noch keine Bewertungen
- Kom Unit IIIDokument20 SeitenKom Unit IIIRamanathan DuraiNoch keine Bewertungen
- GearsDokument37 SeitenGearsذوالفقار علي حسينNoch keine Bewertungen
- Unit-4 CamsDokument37 SeitenUnit-4 CamsgauthamNoch keine Bewertungen
- Chapter: Mechanical - Kinematics of Machinery - Kinematics of Cam Mechanisms CamsDokument25 SeitenChapter: Mechanical - Kinematics of Machinery - Kinematics of Cam Mechanisms CamsdhaNoch keine Bewertungen
- Section 18: Illustrated Source Book Mechanical ComponentsDokument46 SeitenSection 18: Illustrated Source Book Mechanical ComponentsLijo ThoamsNoch keine Bewertungen
- Cams Design & Kinematic Analysis: According To The Surface in ContactDokument13 SeitenCams Design & Kinematic Analysis: According To The Surface in ContactFaisal MaqsoodNoch keine Bewertungen
- 1.1 A Simple Experiment: What Is A Cam?Dokument14 Seiten1.1 A Simple Experiment: What Is A Cam?Mohamed AwadNoch keine Bewertungen
- Cams PDFDokument16 SeitenCams PDFJhed PabloNoch keine Bewertungen
- Cams and Followers Lecture - 2Dokument13 SeitenCams and Followers Lecture - 2niaz kilamNoch keine Bewertungen
- Elements of Mechanism 2: Cams 1.1 Definition of CamsDokument12 SeitenElements of Mechanism 2: Cams 1.1 Definition of CamsMarianne DevillenaNoch keine Bewertungen
- Cams H OutsDokument12 SeitenCams H OutsODELLON NOLLEDONoch keine Bewertungen
- Vandayar Engineering College Department of Mechanical EngineeringDokument15 SeitenVandayar Engineering College Department of Mechanical EngineeringJeeevaNoch keine Bewertungen
- Looking For GATE Preparation Material? Join & Get Here Now!: Introduction To MechanismsDokument14 SeitenLooking For GATE Preparation Material? Join & Get Here Now!: Introduction To MechanismsAkash SoniNoch keine Bewertungen
- CamDokument28 SeitenCamu1909030Noch keine Bewertungen
- ME 3670: Design and Analysis of Machine Elements 1: Part I: Kinematics and Mechanisms Lecture 16-19 Cam Motion Program and Profile Design Read 8.1-8.10, KinzelDokument34 SeitenME 3670: Design and Analysis of Machine Elements 1: Part I: Kinematics and Mechanisms Lecture 16-19 Cam Motion Program and Profile Design Read 8.1-8.10, KinzelIndushekhar KumarNoch keine Bewertungen
- 6 Cams: 6.1.1 A Simple Experiment: What Is A Cam?Dokument9 Seiten6 Cams: 6.1.1 A Simple Experiment: What Is A Cam?Charles Bentum VroomNoch keine Bewertungen
- Cam and Follower Part 1Dokument7 SeitenCam and Follower Part 1Safdar Ali NiaziNoch keine Bewertungen
- The Orchid School - Learning From Ladakh, August 2022Dokument6 SeitenThe Orchid School - Learning From Ladakh, August 2022Параг ТамбеNoch keine Bewertungen
- Class X Mathematics: Page No. Dropped Topics/ChapterDokument6 SeitenClass X Mathematics: Page No. Dropped Topics/ChapterПараг ТамбеNoch keine Bewertungen
- SKNSITS Lonavala SEM-II Activity Report 15-16Dokument46 SeitenSKNSITS Lonavala SEM-II Activity Report 15-16Параг ТамбеNoch keine Bewertungen
- Matlab®: Academic Resource CenterDokument40 SeitenMatlab®: Academic Resource CenterПараг ТамбеNoch keine Bewertungen
- Fundamentals of Mechanical VibrationsDokument74 SeitenFundamentals of Mechanical VibrationsПараг ТамбеNoch keine Bewertungen
- 2U6 S4HANA1909 Set-Up EN XXDokument10 Seiten2U6 S4HANA1909 Set-Up EN XXGerson Antonio MocelimNoch keine Bewertungen
- Analysis of The Tata Consultancy ServiceDokument20 SeitenAnalysis of The Tata Consultancy ServiceamalremeshNoch keine Bewertungen
- Three Categories of AutismDokument14 SeitenThree Categories of Autismapi-327260204Noch keine Bewertungen
- Signal&Systems - Lab Manual - 2021-1Dokument121 SeitenSignal&Systems - Lab Manual - 2021-1telecom_numl8233Noch keine Bewertungen
- TG - Health 3 - Q3Dokument29 SeitenTG - Health 3 - Q3LouieNoch keine Bewertungen
- Exam Questions AZ-304: Microsoft Azure Architect Design (Beta)Dokument9 SeitenExam Questions AZ-304: Microsoft Azure Architect Design (Beta)Deepa R NairNoch keine Bewertungen
- Sauna Studies As An Academic Field: A New Agenda For International ResearchDokument42 SeitenSauna Studies As An Academic Field: A New Agenda For International ResearchsedgehammerNoch keine Bewertungen
- 2nd Quarter Exam All Source g12Dokument314 Seiten2nd Quarter Exam All Source g12Bobo Ka100% (1)
- Social Networking ProjectDokument11 SeitenSocial Networking Projectapi-463256826Noch keine Bewertungen
- March FOMC: Tighter Credit Conditions Substituting For Rate HikesDokument8 SeitenMarch FOMC: Tighter Credit Conditions Substituting For Rate HikeshaginileNoch keine Bewertungen
- Project Report Devki Nandan Sharma AmulDokument79 SeitenProject Report Devki Nandan Sharma AmulAvaneesh KaushikNoch keine Bewertungen
- Internship Report On A Study of The Masterbranding of Dove: Urmee Rahman SilveeDokument45 SeitenInternship Report On A Study of The Masterbranding of Dove: Urmee Rahman SilveeVIRAL DOSHINoch keine Bewertungen
- Julian BanzonDokument10 SeitenJulian BanzonEhra Madriaga100% (1)
- WRAP HandbookDokument63 SeitenWRAP Handbookzoomerfins220% (1)
- Sportex 2017Dokument108 SeitenSportex 2017AleksaE77100% (1)
- Problem Based LearningDokument23 SeitenProblem Based Learningapi-645777752Noch keine Bewertungen
- PH Water On Stability PesticidesDokument6 SeitenPH Water On Stability PesticidesMontoya AlidNoch keine Bewertungen
- 2-Emotional Abuse, Bullying and Forgiveness Among AdolescentsDokument17 Seiten2-Emotional Abuse, Bullying and Forgiveness Among AdolescentsClinical and Counselling Psychology ReviewNoch keine Bewertungen
- Grade 10 Science - 2Dokument5 SeitenGrade 10 Science - 2Nenia Claire Mondarte CruzNoch keine Bewertungen
- Soal Pas Myob Kelas Xii GanjilDokument4 SeitenSoal Pas Myob Kelas Xii GanjilLank BpNoch keine Bewertungen
- HSE Induction Training 1687407986Dokument59 SeitenHSE Induction Training 1687407986vishnuvarthanNoch keine Bewertungen
- ANTH 222 Syllabus 2012Dokument6 SeitenANTH 222 Syllabus 2012Maythe S. HanNoch keine Bewertungen
- Mae (256F) - HW3 PDFDokument2 SeitenMae (256F) - HW3 PDFClaireNoch keine Bewertungen
- Deep MethodDokument13 SeitenDeep Methoddarkelfist7Noch keine Bewertungen
- Comparing Effect of Adding LDPE, PP, PMMA On The Mechanical Properties of Polystyrene (PS)Dokument12 SeitenComparing Effect of Adding LDPE, PP, PMMA On The Mechanical Properties of Polystyrene (PS)Jawad K. OleiwiNoch keine Bewertungen
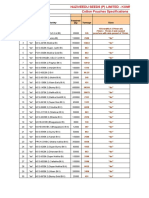
- Cotton Pouches SpecificationsDokument2 SeitenCotton Pouches SpecificationspunnareddytNoch keine Bewertungen
- Judicial Review of Legislative ActionDokument14 SeitenJudicial Review of Legislative ActionAnushka SinghNoch keine Bewertungen
- 7 кмжDokument6 Seiten7 кмжGulzhaina KhabibovnaNoch keine Bewertungen