Das könnte Ihnen auch gefallen
- Unit 5 NotesDokument25 SeitenUnit 5 NoteskaustubhNoch keine Bewertungen
- C HandoutDokument14 SeitenC HandoutAsep Bagja NugrahaNoch keine Bewertungen
- PIC18 Pulse Width ModulationDokument16 SeitenPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Lab 2 - Uso de Display 7 Segmentos en Arduino. Entradas AnalogicasDokument27 SeitenLab 2 - Uso de Display 7 Segmentos en Arduino. Entradas Analogicasroger david pimienta barrosNoch keine Bewertungen
- Test CodeDokument20 SeitenTest Codeantonio vukeNoch keine Bewertungen
- Project ReportDokument49 SeitenProject ReportPrateek SrivastavaNoch keine Bewertungen
- Lab 13Dokument11 SeitenLab 13ubaidNoch keine Bewertungen
- Esd Lab - 9Dokument19 SeitenEsd Lab - 9Jampani sarath chandraNoch keine Bewertungen
- Embedded System Lab ManualDokument43 SeitenEmbedded System Lab ManualSiva RanjithNoch keine Bewertungen
- 05 Laboratory Exercise 5full-PermissionDokument10 Seiten05 Laboratory Exercise 5full-PermissionDomsNoch keine Bewertungen
- 7 Segment DisplayDokument32 Seiten7 Segment DisplayGagah PrakosoNoch keine Bewertungen
- RPMDokument18 SeitenRPMCarlos Alberto Venancio PerezNoch keine Bewertungen
- Arm7 LPC2148 1Dokument48 SeitenArm7 LPC2148 1Roberta Fisher100% (2)
- Soalan PRA MySkills 2013 - Release PublisDokument11 SeitenSoalan PRA MySkills 2013 - Release Publisnabilo20Noch keine Bewertungen
- Pid ArduinoDokument6 SeitenPid ArduinoJohn MurrayNoch keine Bewertungen
- lm35 Using Atmega8Dokument13 Seitenlm35 Using Atmega8Nandan MaheshNoch keine Bewertungen
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Dokument29 SeitenInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaNoch keine Bewertungen
- ARM LPC1769 Sevensegment InterfaceDokument6 SeitenARM LPC1769 Sevensegment Interfacemanojram18Noch keine Bewertungen
- ATmega8 SHT71 Temperature Humidity and Dew Point ExampleDokument9 SeitenATmega8 SHT71 Temperature Humidity and Dew Point Examplehieuhuech1Noch keine Bewertungen
- ATMega16 Microcontroller Digital LM35 LCD ThermometerDokument4 SeitenATMega16 Microcontroller Digital LM35 LCD ThermometerAdrianMartinezMendez100% (3)
- GSM Based Home AutomationDokument80 SeitenGSM Based Home AutomationShashi Kant SainiNoch keine Bewertungen
- Description: 1k DQ CLK RST GND VDD T (Hi) 1Dokument26 SeitenDescription: 1k DQ CLK RST GND VDD T (Hi) 1lgrome73Noch keine Bewertungen
- Dayananda Sagar College of Engineering: Mini-Project Report (Microprocessors)Dokument13 SeitenDayananda Sagar College of Engineering: Mini-Project Report (Microprocessors)Nandan MaheshNoch keine Bewertungen
- ES FinalDokument26 SeitenES FinalBilal AhmedNoch keine Bewertungen
- Design Task 1 Final LabDokument15 SeitenDesign Task 1 Final Labrazorblademk2Noch keine Bewertungen
- EST ManualDokument125 SeitenEST ManualanandjothimanijothimNoch keine Bewertungen
- Embeded PRJDokument7 SeitenEmbeded PRJWiz Nati XvNoch keine Bewertungen
- Codigo LCD C ModificadoDokument3 SeitenCodigo LCD C ModificadoMartinQuintanaCasusol100% (1)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDokument5 SeitenInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- Evd19i018-Esdp Lab 9Dokument18 SeitenEvd19i018-Esdp Lab 9Jampani sarath chandraNoch keine Bewertungen
- Experiment No 3 AdcDokument8 SeitenExperiment No 3 AdcDakshata WaghNoch keine Bewertungen
- Interfacing LCD With PIC Microcontroller - MPLAB XC8Dokument8 SeitenInterfacing LCD With PIC Microcontroller - MPLAB XC8Marian VladianuNoch keine Bewertungen
- PIC Microcontrollers: Low-End ArchitecturesDokument46 SeitenPIC Microcontrollers: Low-End Architecturesvivek2585Noch keine Bewertungen
- ES Lab FileDokument37 SeitenES Lab FileMøhït JáñgírNoch keine Bewertungen
- Lecture12-Using PIC Micro Controller 16F877ADokument57 SeitenLecture12-Using PIC Micro Controller 16F877ADoodee Mohammed100% (4)
- Intelligent Temperature Monitoring and Control System Using AVR Microcontroller - Embedded LabDokument13 SeitenIntelligent Temperature Monitoring and Control System Using AVR Microcontroller - Embedded Labrusty123xNoch keine Bewertungen
- USB ThermometerDokument40 SeitenUSB ThermometerTheodøros D' SpectrøømNoch keine Bewertungen
- WWW Ermicro ComDokument19 SeitenWWW Ermicro ComDinosaurio1990Noch keine Bewertungen
- Ee 222 CepDokument10 SeitenEe 222 CepObed AhmadNoch keine Bewertungen
- Lab 06-Application and Understanding of Analog To Digital Conversion (A/D)Dokument6 SeitenLab 06-Application and Understanding of Analog To Digital Conversion (A/D)Nida AliNoch keine Bewertungen
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Dokument13 SeitenDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNoch keine Bewertungen
- Villanueva MDokument6 SeitenVillanueva MDrakie SumanilNoch keine Bewertungen
- 7 Seg ASMUpdownDokument2 Seiten7 Seg ASMUpdownbebenbenycilgarNoch keine Bewertungen
- Computer Interface Trainer (MDA-Win8086) - PresentationDokument50 SeitenComputer Interface Trainer (MDA-Win8086) - Presentationranahamid00780% (5)
- Microcontrollers Lab ManualDokument37 SeitenMicrocontrollers Lab ManualArati DazNoch keine Bewertungen
- Adc ProgramDokument3 SeitenAdc ProgramMallikarjun DeshmukhNoch keine Bewertungen
- Lecture Programming MicrocontrollersDokument22 SeitenLecture Programming MicrocontrollersHectorLopezNoch keine Bewertungen
- Lab Manual 1Dokument90 SeitenLab Manual 1NethajiNoch keine Bewertungen
- Lab 5 DR Muslim (Latest)Dokument15 SeitenLab 5 DR Muslim (Latest)a ThanhNoch keine Bewertungen
- Temperature Sensor Program CodeDokument6 SeitenTemperature Sensor Program CodeJay Ann SaleNoch keine Bewertungen
- roject mẫu AVR2Dokument58 Seitenroject mẫu AVR2luuvuduc81Noch keine Bewertungen
- Microcontroller ProjectDokument6 SeitenMicrocontroller ProjectfayazNoch keine Bewertungen
- C5 - Parallel Input Output Ports Interfacing2Dokument53 SeitenC5 - Parallel Input Output Ports Interfacing2Mifzal IzzaniNoch keine Bewertungen
- Dip204 4eDokument4 SeitenDip204 4eNarinder Singh100% (2)
- Program For ADC 0808 Connecting Temperature Sensor Using 8051Dokument13 SeitenProgram For ADC 0808 Connecting Temperature Sensor Using 8051Kishore KumarNoch keine Bewertungen
- HD 61202Dokument5 SeitenHD 61202kalangeNoch keine Bewertungen
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- Program of ActivitiesDokument2 SeitenProgram of ActivitiesVon Limuel LopezNoch keine Bewertungen
- Aectp 300 3Dokument284 SeitenAectp 300 3AlexNoch keine Bewertungen
- Gates Crimp Data and Dies Manual BandasDokument138 SeitenGates Crimp Data and Dies Manual BandasTOQUES00Noch keine Bewertungen
- SemDokument583 SeitenSemMaria SantosNoch keine Bewertungen
- Capacity Analysis of Kashmir Highway IslamabadDokument71 SeitenCapacity Analysis of Kashmir Highway Islamabadm saadullah khanNoch keine Bewertungen
- International Supply Chain ManagementDokument2 SeitenInternational Supply Chain ManagementPRASANT KUMAR SAMALNoch keine Bewertungen
- Chemical Engineering & Processing: Process Intensi Fication: ArticleinfoDokument9 SeitenChemical Engineering & Processing: Process Intensi Fication: Articleinfomiza adlinNoch keine Bewertungen
- Combinational Logic-Part-2 PDFDokument25 SeitenCombinational Logic-Part-2 PDFSAKSHI PALIWALNoch keine Bewertungen
- Basic Approach To The Audit of Electronically Processed DataDokument2 SeitenBasic Approach To The Audit of Electronically Processed DataJestell Ann ArzagaNoch keine Bewertungen
- Tecsun Pl310et PDFDokument30 SeitenTecsun Pl310et PDFAxel BodemannNoch keine Bewertungen
- ERP Solution in Hospital: Yangyang Shao TTU 2013Dokument25 SeitenERP Solution in Hospital: Yangyang Shao TTU 2013Vishakh SubbayyanNoch keine Bewertungen
- Hexoloy SP Sic TdsDokument4 SeitenHexoloy SP Sic TdsAnonymous r3MoX2ZMTNoch keine Bewertungen
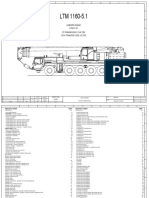
- Libherr CraneDokument157 SeitenLibherr Craneali67% (3)
- Manual HobartDokument39 SeitenManual HobartВолодимир БроNoch keine Bewertungen
- Naca Duct RMDokument47 SeitenNaca Duct RMGaurav GuptaNoch keine Bewertungen
- Make Yeast StarterDokument2 SeitenMake Yeast StarterAlexandraNoch keine Bewertungen
- Brp-Rotax Chassis Approval FormDokument3 SeitenBrp-Rotax Chassis Approval Formdelta compNoch keine Bewertungen
- Fiedler1950 - A Comparison of Therapeutic Relationships in PsychoanalyticDokument10 SeitenFiedler1950 - A Comparison of Therapeutic Relationships in PsychoanalyticAnca-Maria CovaciNoch keine Bewertungen
- Sensor de Temperatura e Umidade CarelDokument1 SeiteSensor de Temperatura e Umidade CarelMayconLimaNoch keine Bewertungen
- Lecture 5Dokument20 SeitenLecture 5Paylaşım KanalıNoch keine Bewertungen
- Customer Service Metrics CalculatorDokument28 SeitenCustomer Service Metrics CalculatorSelma Regita MahardiniNoch keine Bewertungen
- Energy BodiesDokument1 SeiteEnergy BodiesannoyingsporeNoch keine Bewertungen
- Classroom Management PlanDokument14 SeitenClassroom Management PlancowlesmathNoch keine Bewertungen
- The 5 Pivotal Paragraphs in A PaperDokument1 SeiteThe 5 Pivotal Paragraphs in A PaperFer Rivas NietoNoch keine Bewertungen
- Nissan Note E-Power 2022 Quick Guide ENDokument57 SeitenNissan Note E-Power 2022 Quick Guide ENSarita EmmanuelNoch keine Bewertungen
- World English 2ed 1 WorkbookDokument80 SeitenWorld English 2ed 1 WorkbookMatheus EdneiNoch keine Bewertungen
- 3DD5036 Horizontal.2Dokument6 Seiten3DD5036 Horizontal.2routerya50% (2)
- Thesis - A Surlyn® Ionomer As A Self-Healing and Self-Sensing Composite - 2011 - UKDokument194 SeitenThesis - A Surlyn® Ionomer As A Self-Healing and Self-Sensing Composite - 2011 - UKAhmedNoch keine Bewertungen
- Probability Theory - VaradhanDokument6 SeitenProbability Theory - VaradhanTom HenNoch keine Bewertungen
- Manitou 1350RDokument4 SeitenManitou 1350RcandlaganNoch keine Bewertungen