Das könnte Ihnen auch gefallen
- Lab 4: Linear Time-Invariant Systems and Representation: ObjectivesDokument6 SeitenLab 4: Linear Time-Invariant Systems and Representation: ObjectivesFahad AneebNoch keine Bewertungen
- Identification: 2.1 Identification of Transfer Functions 2.1.1 Review of Transfer FunctionDokument29 SeitenIdentification: 2.1 Identification of Transfer Functions 2.1.1 Review of Transfer FunctionSucheful LyNoch keine Bewertungen
- Solving Differential Equations Using MATLABDokument8 SeitenSolving Differential Equations Using MATLABAnonymous DHJ8C3oNoch keine Bewertungen
- Lab 06 PDFDokument7 SeitenLab 06 PDFAbdul Rehman AfzalNoch keine Bewertungen
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDokument5 SeitenENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNoch keine Bewertungen
- Lab 2-CS-Lab-2020Dokument12 SeitenLab 2-CS-Lab-2020Lovely JuttNoch keine Bewertungen
- Linear Control System Lab: Familiarization With Transfer Function and Time ResponseDokument14 SeitenLinear Control System Lab: Familiarization With Transfer Function and Time ResponseMuhammad Saad AbdullahNoch keine Bewertungen
- MATLAB ProblemsDokument4 SeitenMATLAB ProblemsPriyanka TiwariNoch keine Bewertungen
- Matlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentsDokument23 SeitenMatlab Basics Tutorial: Electrical and Electronic Engineering & Electrical and Communication Engineering StudentssushantnirwanNoch keine Bewertungen
- Sos 2Dokument16 SeitenSos 2youssef_dablizNoch keine Bewertungen
- ELG4152L305Dokument33 SeitenELG4152L305Rahul GalaNoch keine Bewertungen
- ELE 421 Control Systems Laboratory# 1Dokument6 SeitenELE 421 Control Systems Laboratory# 1Avi SinghNoch keine Bewertungen
- System Analysis Using Laplace Transform: 1. PolynomialsDokument11 SeitenSystem Analysis Using Laplace Transform: 1. PolynomialsnekuNoch keine Bewertungen
- Lab 3-CS-LabDokument12 SeitenLab 3-CS-Labهاشمی دانشNoch keine Bewertungen
- Assignment 2 Matlab RegProbsDokument4 SeitenAssignment 2 Matlab RegProbsMohammed BanjariNoch keine Bewertungen
- Aim: - To Find Transpose of A Given Matrix. Apparatus: - MATLAB Kit. TheoryDokument10 SeitenAim: - To Find Transpose of A Given Matrix. Apparatus: - MATLAB Kit. TheoryGaurav MishraNoch keine Bewertungen
- Closed-loop control system block diagramDokument41 SeitenClosed-loop control system block diagramTing SamuelNoch keine Bewertungen
- Basic Matlab/Simulink For System Dynamics: StartupDokument11 SeitenBasic Matlab/Simulink For System Dynamics: StartupMikaNoch keine Bewertungen
- Lab-2-MTE-2210 RyanDokument18 SeitenLab-2-MTE-2210 RyanFaria Sultana MimiNoch keine Bewertungen
- Expt 2 Transfer Function 1Dokument6 SeitenExpt 2 Transfer Function 1JHUSTINE CAÑETENoch keine Bewertungen
- Lab-2-Course Matlab Manual For LCSDokument12 SeitenLab-2-Course Matlab Manual For LCSAshno KhanNoch keine Bewertungen
- Lab4 PDFDokument17 SeitenLab4 PDFzain islamNoch keine Bewertungen
- State Variable ModelsDokument13 SeitenState Variable Modelsali alaaNoch keine Bewertungen
- LTIDokument16 SeitenLTIAhmed AlhadarNoch keine Bewertungen
- Eee 336 L1&2Dokument24 SeitenEee 336 L1&2Rezwan ZakariaNoch keine Bewertungen
- Lab No. 3-Block Diagram ReductionDokument12 SeitenLab No. 3-Block Diagram ReductionAshno KhanNoch keine Bewertungen
- Expt 2 Transfer FunctionDokument4 SeitenExpt 2 Transfer Functions2121698Noch keine Bewertungen
- A Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionDokument4 SeitenA Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionMOKANSNoch keine Bewertungen
- ps3 (1) From MAE 4780Dokument5 Seitenps3 (1) From MAE 4780fooz10Noch keine Bewertungen
- Mfa Merit Exercises 5 Simulink 5174 2Dokument8 SeitenMfa Merit Exercises 5 Simulink 5174 2JamesNoch keine Bewertungen
- Experiment No.1: Introduction To Lti Representation and Transfer Function ModelDokument7 SeitenExperiment No.1: Introduction To Lti Representation and Transfer Function ModelIra CervoNoch keine Bewertungen
- Signals and Systems: Lecture #2: Introduction To SystemsDokument8 SeitenSignals and Systems: Lecture #2: Introduction To Systemsking_hhhNoch keine Bewertungen
- The Time Theory Analysis and MATLAB Simulation of Control SystemDokument7 SeitenThe Time Theory Analysis and MATLAB Simulation of Control SystemÄy MênNoch keine Bewertungen
- Activity No. 3 The Transfer Function and System ResponseDokument3 SeitenActivity No. 3 The Transfer Function and System ResponseChester Kyles ColitaNoch keine Bewertungen
- 16-EL-A2 - Mai 2017 - Version AnglaiseDokument7 Seiten16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNoch keine Bewertungen
- Lab2 Control SystemDokument43 SeitenLab2 Control Systemعبدالملك جمالNoch keine Bewertungen
- Control System Lab Exercise PDFDokument59 SeitenControl System Lab Exercise PDFilijakljNoch keine Bewertungen
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDokument10 SeitenMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNoch keine Bewertungen
- MATLAB Control System Modelling and AnalysisDokument45 SeitenMATLAB Control System Modelling and AnalysisJagabandhu KarNoch keine Bewertungen
- Control System 2014 Midterm Exam. 1 (2 Pages, 38 Points in Total)Dokument7 SeitenControl System 2014 Midterm Exam. 1 (2 Pages, 38 Points in Total)horace2005Noch keine Bewertungen
- Chapter 1Dokument8 SeitenChapter 1hitesh89Noch keine Bewertungen
- HW2Dokument3 SeitenHW2Mohammad JbaratNoch keine Bewertungen
- Chapter 8 State Space AnalysisDokument22 SeitenChapter 8 State Space AnalysisAli AhmadNoch keine Bewertungen
- 3723 Lecture 18Dokument41 Seiten3723 Lecture 18Reddy BabuNoch keine Bewertungen
- Elementary Signals Exercises on Functions, Laplace Transforms and Fourier SeriesDokument25 SeitenElementary Signals Exercises on Functions, Laplace Transforms and Fourier SeriesNguyen Van HaiNoch keine Bewertungen
- Lab 3Dokument4 SeitenLab 3Trang PhamNoch keine Bewertungen
- Digital Control Systems z-Transform AnalysisDokument22 SeitenDigital Control Systems z-Transform Analysisvignanaraj100% (1)
- Matlab LectureDokument6 SeitenMatlab Lecturekafle_yrsNoch keine Bewertungen
- Lect Note 1 IntroDokument28 SeitenLect Note 1 IntroJie RongNoch keine Bewertungen
- Control System IDokument12 SeitenControl System IKhawar RiazNoch keine Bewertungen
- 6 MatLab Tutorial ProblemsDokument27 Seiten6 MatLab Tutorial Problemsabhijeet834uNoch keine Bewertungen
- Ordinary Differential EquationsDokument12 SeitenOrdinary Differential EquationsKapilSahuNoch keine Bewertungen
- MEC3457 Computer Lab 1 PDFDokument8 SeitenMEC3457 Computer Lab 1 PDFMuhammad Abbas RawjaniNoch keine Bewertungen
- Matlab TutorialDokument18 SeitenMatlab TutorialUmair ShahidNoch keine Bewertungen
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Von EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Bewertung: 2.5 von 5 Sternen2.5/5 (2)
- Nonlinear Control Feedback Linearization Sliding Mode ControlVon EverandNonlinear Control Feedback Linearization Sliding Mode ControlNoch keine Bewertungen
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Von EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Bewertung: 4 von 5 Sternen4/5 (2)
- MATLAB for Beginners: A Gentle Approach - Revised EditionVon EverandMATLAB for Beginners: A Gentle Approach - Revised EditionNoch keine Bewertungen
- PH Alkalinity ExplainedDokument4 SeitenPH Alkalinity ExplainedDean DsouzaNoch keine Bewertungen
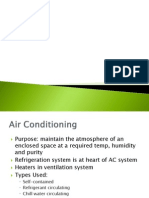
- AC MaintenanceDokument21 SeitenAC MaintenanceAli AhmadNoch keine Bewertungen
- Jan 2008 Course Outline FinanceDokument5 SeitenJan 2008 Course Outline FinanceAli AhmadNoch keine Bewertungen
- Matlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisDokument8 SeitenMatlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisAli AhmadNoch keine Bewertungen
- Lecture 2 - 30-01-08Dokument17 SeitenLecture 2 - 30-01-08Ali AhmadNoch keine Bewertungen
- Printing The Model:: SimulinkDokument8 SeitenPrinting The Model:: SimulinkAli AhmadNoch keine Bewertungen
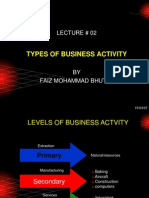
- The Purpose of Business Activity: LECTURE # 01 & 02Dokument9 SeitenThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNoch keine Bewertungen
- Electrical Theory: Howard W Penrose, PH.D., CMRP InstructorDokument79 SeitenElectrical Theory: Howard W Penrose, PH.D., CMRP InstructorSandun LakminaNoch keine Bewertungen
- The Purpose of Business Activity: LECTURE # 01 & 02Dokument9 SeitenThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNoch keine Bewertungen
- Business Management Process Improvement LectureDokument26 SeitenBusiness Management Process Improvement LectureAli AhmadNoch keine Bewertungen
- Matlab Training - Basic Control TheoryDokument10 SeitenMatlab Training - Basic Control TheoryhamedNoch keine Bewertungen
- Matlab Training - SIMULINKDokument8 SeitenMatlab Training - SIMULINKAtta RehmanNoch keine Bewertungen
- Matlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsDokument14 SeitenMatlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsAli AhmadNoch keine Bewertungen
- Matlab Training - SIMULINKDokument8 SeitenMatlab Training - SIMULINKAtta RehmanNoch keine Bewertungen
- Introduction To: Artificial IntelligenceDokument31 SeitenIntroduction To: Artificial IntelligenceAli AhmadNoch keine Bewertungen
- MATLAB M-files Scripts and Functions GuideDokument6 SeitenMATLAB M-files Scripts and Functions Guideederdiego2709Noch keine Bewertungen
- Lecture 2Dokument26 SeitenLecture 2Ali AhmadNoch keine Bewertungen
- Matlab Training Session Ii Data Presentation: 2-D PlotsDokument8 SeitenMatlab Training Session Ii Data Presentation: 2-D PlotsAli AhmadNoch keine Bewertungen
- Table of Contents DocumentDokument11 SeitenTable of Contents DocumentAli AhmadNoch keine Bewertungen
- Introduction To VHDL: AIR University AU, E-9, IslamabadDokument29 SeitenIntroduction To VHDL: AIR University AU, E-9, IslamabadAli AhmadNoch keine Bewertungen
- System On Chips Soc'S & Multiprocessor System On Chips MpsocsDokument42 SeitenSystem On Chips Soc'S & Multiprocessor System On Chips MpsocsAli AhmadNoch keine Bewertungen
- Operators: Introduction To ASIC DesignDokument6 SeitenOperators: Introduction To ASIC DesignAli AhmadNoch keine Bewertungen
- Sequential Code in VHDLDokument42 SeitenSequential Code in VHDLAli Ahmad0% (1)
- 2-Level Logic ( 0', 1') .: Introduction To ASIC DesignDokument8 Seiten2-Level Logic ( 0', 1') .: Introduction To ASIC DesignAli AhmadNoch keine Bewertungen
- Small Neural Nets LabDokument6 SeitenSmall Neural Nets LabAli AhmadNoch keine Bewertungen
- Introduction To ASIC Design: Lab Report StandardsDokument1 SeiteIntroduction To ASIC Design: Lab Report StandardsAli AhmadNoch keine Bewertungen
- 5.1 Multiplexer #1 Using Operators WHEN/ELSEDokument10 Seiten5.1 Multiplexer #1 Using Operators WHEN/ELSEAli AhmadNoch keine Bewertungen
- Multiply and Accumulate Circuits LabDokument5 SeitenMultiply and Accumulate Circuits LabAli AhmadNoch keine Bewertungen
- Introduction To ASIC Design: Lab Report InstructionsDokument1 SeiteIntroduction To ASIC Design: Lab Report InstructionsAli AhmadNoch keine Bewertungen
- Instrumentos de Medición y Herramientas de Precisión Starrett DIAl TEST INDICATOR 196 A1ZDokument24 SeitenInstrumentos de Medición y Herramientas de Precisión Starrett DIAl TEST INDICATOR 196 A1Zmicmarley2012Noch keine Bewertungen
- Usa Easa 145Dokument31 SeitenUsa Easa 145Surya VenkatNoch keine Bewertungen
- Com 0991Dokument362 SeitenCom 0991Facer DancerNoch keine Bewertungen
- An Overview of Tensorflow + Deep learning 沒一村Dokument31 SeitenAn Overview of Tensorflow + Deep learning 沒一村Syed AdeelNoch keine Bewertungen
- CTS experiments comparisonDokument2 SeitenCTS experiments comparisonmanojkumarNoch keine Bewertungen
- Palmetto Bay's Ordinance On Bird RefugeDokument4 SeitenPalmetto Bay's Ordinance On Bird RefugeAndreaTorresNoch keine Bewertungen
- Chapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationDokument16 SeitenChapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationSarmila MahendranNoch keine Bewertungen
- Haryana Retial GarmentsDokument8 SeitenHaryana Retial Garmentssudesh.samastNoch keine Bewertungen
- CCS PDFDokument2 SeitenCCS PDFАндрей НадточийNoch keine Bewertungen
- ASME Y14.6-2001 (R2007), Screw Thread RepresentationDokument27 SeitenASME Y14.6-2001 (R2007), Screw Thread RepresentationDerekNoch keine Bewertungen
- A320 Normal ProceduresDokument40 SeitenA320 Normal ProceduresRajesh KumarNoch keine Bewertungen
- Variable Displacement Closed Circuit: Model 70160 Model 70360Dokument56 SeitenVariable Displacement Closed Circuit: Model 70160 Model 70360michael bossa alisteNoch keine Bewertungen
- 158 Oesmer Vs Paraisa DevDokument1 Seite158 Oesmer Vs Paraisa DevRobelle Rizon100% (1)
- CASE DigeSTDokument2 SeitenCASE DigeSTZepht BadillaNoch keine Bewertungen
- Dissolved Oxygen Primary Prod Activity1Dokument7 SeitenDissolved Oxygen Primary Prod Activity1api-235617848Noch keine Bewertungen
- Okuma Osp5000Dokument2 SeitenOkuma Osp5000Zoran VujadinovicNoch keine Bewertungen
- Prestressing ProductsDokument40 SeitenPrestressing ProductsSakshi Sana100% (1)
- Guidelines On Accreditation of CSOs (LSB Representation) - DILG MC 2019-72Dokument18 SeitenGuidelines On Accreditation of CSOs (LSB Representation) - DILG MC 2019-72Cedric Dequito100% (1)
- Max 761 CsaDokument12 SeitenMax 761 CsabmhoangtmaNoch keine Bewertungen
- Part I-Final Report On Soil InvestigationDokument16 SeitenPart I-Final Report On Soil InvestigationmangjuhaiNoch keine Bewertungen
- Queries With AND and OR OperatorsDokument29 SeitenQueries With AND and OR OperatorstrivaNoch keine Bewertungen
- Take Private Profit Out of Medicine: Bethune Calls for Socialized HealthcareDokument5 SeitenTake Private Profit Out of Medicine: Bethune Calls for Socialized HealthcareDoroteo Jose Station100% (1)
- DSA NotesDokument87 SeitenDSA NotesAtefrachew SeyfuNoch keine Bewertungen
- Create A Gmail Account in Some Simple StepsDokument9 SeitenCreate A Gmail Account in Some Simple Stepsptjain02Noch keine Bewertungen
- HI - 93703 Manual TurbidimetroDokument13 SeitenHI - 93703 Manual Turbidimetrojesica31Noch keine Bewertungen
- Logistic Regression to Predict Airline Customer Satisfaction (LRCSDokument20 SeitenLogistic Regression to Predict Airline Customer Satisfaction (LRCSJenishNoch keine Bewertungen
- Ten Golden Rules of LobbyingDokument1 SeiteTen Golden Rules of LobbyingChaibde DeNoch keine Bewertungen
- API MidtermDokument4 SeitenAPI MidtermsimranNoch keine Bewertungen
- Computers As Components 2nd Edi - Wayne WolfDokument815 SeitenComputers As Components 2nd Edi - Wayne WolfShubham RajNoch keine Bewertungen
- Rebranding Brief TemplateDokument8 SeitenRebranding Brief TemplateRushiraj Patel100% (1)