Advances in Applied Acoustics Vol. 1 Iss.
1, November 2012
Integrated Detection Method of Underwater Acoustic Fuze Based on IEMD, VIFD and ED
Qiao Hu
Science and Technology on Underwater Information and Control Laboratory, Xian, 710075, China The 705 Research Institute, China Shipbuilding Industry Corporation, Xian 710075, China hqxjtu@hotmail.com
Abstract In this paper, in order to solve the problem of accurately detecting the underwater acoustic fuze in the complicated natural interferences, with the different macrostructure and microstructure between the target echo signals and the interferences such as reverberation, a novel integrated detection method of underwater acoustic fuze is proposed, where firstly these different intrinsic mode functions (IMFs) are decomposed via the improved empirical mode decomposition (IEMD) from original signals received by the fuze system, to separate the target echo signal from the reverberation, and secondly the statistics of variance-ofinstantaneous-frequency detection (VIFD) and energy detection (ED) are obtained from IMFs and combined as an integrated detector to detect the underwater acoustic fuze excellently. Through lake tests, this method is applied to the underwater acoustic fuze detection, and these testing results show that the proposed method has better detection performance than the traditional detection method, such as energy detection and variance-of-instantaneous-frequency detection. Keywords
Underwater Acoustic Fuze; Integrated Detection; Improved Empirical Mode Decomposition ; Variance of Instantaneous Frequency
a major interference factor in the echo analysis and processing, where the amplitude of valid target signal may be submerged, so that the target characteristics cant be discriminated from the amplitude of fuze signal [2]. Therefore, it is very important that the target echo features are extracted from the underwater acoustic reverberation, and it is a prerequisite for the subsequent processing of the target echo. Empirical Mode Decomposition (EMD) can adaptively decompose the complicated multi-component signal into a number of single component signals according to the local characteristic time scales of the signal, where the target signal and the interference signal is broken down into these different intrinsic mode functions (IMF) [3-4] . With the different modal characteristics between the target signal and the interference signal, the local features of the weak target signal can be enhanced. In fact, the modulation characteristic of the transmitted signal is not the same through the underwater target and the surface or seabed, so that for the target signal and the interference signal, there are the essential differences among Doppler frequency, energy and delay [5] . Therefore, in this paper, an improved EMD (IEMD) algorithm based on windowed and adjacent addition IMF is proposed to separate the target echo signal from the reverberation. Some traditional detection methods, such as match filter detection, correlation detection and energy detection, are usually applied to underwater target echo detection [6-7]. The matched filter detector and the correlation detector are optimal to detect the determinate signal from the white noise background in the ideal channel. Due to the complexity of the underwater acoustic channel and multi-path effects,
Introduction The background interference of underwater active acoustic fuze system (UAAFS) includes the natural interference, such as the natural noise in marine environment, the radiated noise of underwater vehicles and warships, the ocean reverberation and the wake scattering interference, in addition to the artificial interference, such as a single or series of explosions interference and countermeasure equipment interference. The natural and artificial interference usually be considered in UAAFS [1]. Especially in shallow water and short-range, the reverberation interfering with the target echo signal is
22
Advances in Applied Acoustics Vol. 1 Iss. 1, November 2012
the detection performance of the theoretical detector often has a serious decline in practical applications [8]. With the difference of power level (or amplitude) between the target echo signal plus noise and the noise, energy detector is only utilized to detect the change of the input noise amplitude mean which stands for the target signal or the noise, and dont consider the details of echo signal and interference [9]. As a new target detection method with the constant false alarm rate, the variance-of-instantaneous-frequency detection (VIFD) uses the details of the instantaneous frequency and these statistical characteristics of the echo signal and the interference to detect the target from the reverberation, which is independent of the variety of the background interference without the target echo signal [10]. In engineering applications, the single VIFD method needs to be combined with other detection methods to improve the detection and antijamming capability. On the basis of the above discussion, a novel integrated detection method of underwater acoustic fuze based on the IEMD, the energy detector and the VIFD method is proposed, where the validity is verified with the engineering application. Improved Emd Blackman windowed EMD (WEMD) EMD has been pioneered by N.E. Huang et al. for adaptively representing non-stationary signals as sums of different simple intrinsic modes of oscillations [3]. With the EMD method, a signal could be decomposed into a number of Intrinsic Mode Functions (IMFs), each of which must satisfy the two definition: (1) In the whole data set, the number of extrema and the number of zero-crossings must either equal or differ at most by one. (2) At any point, the mean value of the envelope defined by local maxima and the envelope defined by the local minima is zero. With a series of sifting, any signal x(t ) can be decomposed with EMD as follows
x(t ) = f i (t ) + rn (t )
i =1 n
signals corresponding to different time scales. In order to reduce or eliminate endpoint effects in application of EMD method, a new boundary processing method based on Blackman window is presented [11]. With this method, the analyzed signal x(t ) is preprocessed by multiplying with the defined window function w(t ) , so that the amplitudes of the signal remain in middle and reduce in both ends. Then, EMD is used to analyze the preprocessed signal x (t ) = w(t ) x(t ) . According to Eq. (1), x (t ) can be defined as
x (t ) = fi (t ) + rn (t )
i =1 n
(2)
So we can obtain the reconstruct function of the Blackman windowed EMD method as
x(t ) =
n
i =1
f i (t ) rn (t ) + w(t ) w(t )
(3)
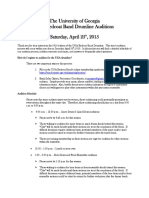
Also take the lake-test echo signal as an example in Fig. 1, and the decomposed results with the proposed method are shown in Fig. 2. With the statistical analysis, the ratios of the sum of the first four IMFs energy to original signals energy are more than 99%. So we only consider the first four IMFs f1 ~ f 4 in Fig. 2, where it is obvious that the proposed boundary processing method sacrifices a few end points but protects the most middle points of the signal from being polluted.
0.4 0.2
Amplitude / A
-0.2
-0.4
500
1000
1500
2000
Number of data point
FIG. 1 THE ACTUAL UNDERWATER ECHO SIGNAL
0.5 0 -0.5 0.05 0 -0.05 0.02 0 -0.02 0.02 0 -0.02
f1 f2 f3 f4
0 500 1000 Number of data point 1500 2000
Thus, one can achieve a decomposition of the signal into n-IMFs and a residue. The IMFs fi (t ) and residue
rn (t )
include different frequency bands ranging from
high to low. The EMD techniques provide a multiscale analysis of the signal as a sum of orthogonal
Amplitude / A
(1)
FIG. 2 THE IMFS WITH WINDOWED EMD
23
Advances in Applied Acoustics Vol. 1 Iss. 1, November 2012
The joint processing method with windowed and adjacent addition EMD In Fig. 2, the experimental studies verified that the windowed EMD method can enormously decrease the boundary distortion. However, our research shows that sometimes noise will increase the EMD error so greatly that the IMFs are distorted seriously and fail to illustrate the actual modes involved in the signal. In order to solve the problem that the characteristic information of an intrinsic oscillation mode is split into two or more intrinsic mode functions, the joint processing method with windowed and adjacent addition EMD is proposed to increase the precision of EMD. The proposed joint processing method is based on the following three steps: 1) Compute the instantaneous frequency (IF) (t ) of every IMF via the windowed EMD. For one IMF fi (t ) in Eq. (3), we can always have its Hilbert transform as
H [ f i (t )] = 1
target, so the IMF f1 stands for the target echo signal (corresponding to Cf1 in Fig. 4).
10 5 0 5 Relative IF / Hz 0 4 2 0 1 0.5 0 0
500
1000 Number of data point
1500
2000
FIG. 3 THE INSTANTANEOUS FREQUENCIES WITH WINDOWED EMD
Due to the interference effects of intermittence and reverberation, the echo signal of the interface reverberation is broken down into f 2 ~ f3 , and the decomposition process is distorted. According to the above three steps of the proposed joint processing approach, the IFs 2 and 3 are processed to judge whether these IFs change suddenly via the rectangular window sliding along the time axis with a length of 50 data points ( see the two dotted lines in Fig. 3). It can be seen that 2 and 3 change suddenly in the window between 1130-point and 1518-point. So the adjacent IMF f 2 and f 3 should be added to form the new IMF,
Cf = f 2 + f 3
f i (t ) d t
(4)
where P means the Cauchy principal component. Then we can have an analytic signal as
A[ f i (t )] = f i (t ) + jH [ f i (t )] = ai (t )e j i (t )
(5) So the IF
with ai (t ) = fi 2 (t ) + H 2[ fi (t )] , i (t ) = arctan[
i (t ) can be expressed as
H [ fi (t )] ]. fi (t )
(corresponding to Cf 2 in Fig. 4).
i (t ) =
d i (t ) d (t )
(6)
2) Consider the adjacent IMFs using a rectangular sliding time window. If their IFs change suddenly during the same period, the adjacent IMFs should be added to form the new IMFs Cf k (t ) . 3) Together make up the real IMFs with the new Cf k (t ) and the residual
f i (t ) .
The last IF 4 shows that f 4 is a slowly varying echo envelope component, and the envelope length around 550-point coincides with the pulse width of the target echo, which indicates that f 4 is the target echo envelope component (corresponding to Cf 3 in Fig. 4). Therefore, with windowed and adjacent addition EMD method, these IMFs Cf1 ~ Cf3 are shown in Fig. 4, which stand for the target echo, the reverberation and the target echo envelope component, respectively.
0.5 0
Cf1
In order to verify the effectiveness of the joint processing method with windowed and adjacent addition EMD, the lake-test echo signal in Fig. 1 is analyzed, and the four IFs 1 ~ 4 in Fig. 3 are obtained with Eq. (6), corresponding to the four IMFs f1 ~ f 4 in Fig. 2. Compared Fig. 2 with Fig. 3, it can be seen that the relative IF 1 changes smoothly and its value is maximum among these IFs 1 ~ 4 . The value of 1 is consistent with the Dopler frequency of underwater
Amplitude / A
-0.5 0.05 0 -0.05 0.02 0 -0.02 0 500 1000 1500 2000
Cf2
Cf3
Number of data point
FIG. 4 THE IMFS WITH WINDOWED AND ADJACENT ADDITION EMD
In fact, the modulation characteristic of the transmitted signal is not the same through the
24
Advances in Applied Acoustics Vol. 1 Iss. 1, November 2012
underwater target and the surface or seabed, so that for the target signal and the interference signal, there are the essential differences among Doppler frequency, energy and delay. In theory, due to the different mode characteristics between the echo of the underwater target acoustic fuze and the reverberation, and the different modulation characteristic of the transmitted signal between the underwater target and the surface, there are essential differences between the underwater target echo and the reverberation received by UAAFS in the Doppler frequency, energy, delay, etc. So the IMFs of the underwater target acoustic fuze signal can be extracted from the reverberation via the proposed joint processing method. Conventional Detection Methods for Underwater Acoustic Fuze Energy detector The energy detector can be expressed as the following binary detection [6]:
H 0 : x[i ] = n[i ] H1 : x[i ] = s[i ] + n[i ] i = 0,1, , N 1 i = 0,1, , N 1
window with the same length to the transmitting pulse width. For Cf1 , the maximum EDS (750-point) is 2.5dB higher than the second-largest EDS (1518-point), and for Cf 3 , the maximum EDS (750-point) is 4.8dB higher than the second-largest EDS (1750-point), which shows that the underwater target can be detected with the target echo signal Cf1 or the target echo envelope component Cf 3 .
The normalized statistic / dB
0 -5 0 -2 -4 0 -5 400 600 800 1000 1200 1400 1600 1800 2000
Cf1
Cf2
Cf3
Number of data point
FIG. 5 THE NORMALIZED TEST STATISTICS OF ENERGY DETECTION
Variance-of-instantaneous-frequency detection The mean of the instantaneous frequency of the singlefrequency signal plus interference noise (SFSPIN) is the carrier frequency, and its instantaneous frequency variance can be expressed as [10]:
2 f
q (q + 1)
2
(7)
where
H0
denotes that the receiving underwater where
q
( f 0 f1 ) 2 +
W2 12(q + 1)
(9)
f0
acoustic signal is only the reverberation interference, and H1 denotes that the receiving underwater acoustic signal contains the underwater target echo and the reverberation, with x[i] for the receiving underwater acoustic signal, s[i] and n[i] for the target signal and the interference, respectively. According to the Neyman-Pearson detection criteria, the energy detection statistic (EDS) E ( x) can be expressed as follows
N 1 i =0 2 x 2 (i) / n
is the signal to noise ratio,
is center
frequency, f1 and W stand for the center frequency and bandwidth of SFSPIN. It can be seen that 2 f is a monotonically decreasing function with take the real-time
1/ 2 f
q,
so we can
as the VIFD statistics (VIFDS),
r ' ' via and compare 1 / 2 f with the detection threshold
binary detection. The target echo signal will appear when 2 f > r ' ' , and the reverberation or the noise interference noise interference 2 f
r' ' .
E ( x) =
H1 > H0
r'
(8)
Though finding the starting point of this instantaneous frequency variance sequence when 2 f > r ' ' , we can extract the target echo from the various noise interference, and thus construct the detector IF ( x) of VIFD. These normalized test statistics of VIFD in Fig. 6 are calculated according to the sliding time window with the same length to the transmitting pulse width, corresponding to Cf1 ~ Cf 3 in Fig. 4. In Fig. 6, the test results of VIFD are similar to EDS in Fig. 5. For Cf1 , the maximum VIFDS is 2.2dB higher than the second-largest VIFDS, and for Cf 3 , the
2 where x 2 (i) is the energy and n is the variance of
N 1 i =0
the underwater acoustic signal x[i] . Comparing E ( x) with detection threshold r ' and taking the result as the basis of judgment, we have the intuitive conclusion that E ( x) will increase when x[i] contains the fuze target echo. Corresponding to these new IMFs
Cf1 ~ Cf 3
in Fig. 4,
these normalized test statistics of energy detection in Fig. 5 are calculated according to the sliding time
25
Advances in Applied Acoustics Vol. 1 Iss. 1, November 2012
maximum VIFDS is 0.9dB higher than the secondlargest VIFDS. From the Fig. 5 and Fig. 6, it can be seen that the underwater target can be detected with the target echo signal Cf1 using EDS or VIFDS. However for Cf 3 , the testing performance of EDS is inferior to the VIFDS, because the frequency is lower and the waveform changes slowly, where the detailed varieties of VIFDS are not so obvious.
The normalized statistic / dB
0 -5 -10 0 -1 -2 -3 0 -5 400 600 800 1000 1200 1400 1600 1800 2000
higher than the second-largest, and for
Cf 3
, the
maximum is 11.6dB higher than the second-largest. Comparing Fig. 8 with Fig. 5 and Fig. 6, it can be seen that for Cf1 , the detection gain of the ID method is about 5dB higher than the single methods, and for Cf 3 , the detection gain is 7~11dB higher than the single methods, which indicates that the ID method combines these advantages of ED and VIFD, and has a better detection performance.
Underwater target echo, reverberation interference, etc.
Cf1
Cf2
Received fuze data
Cf3
Windowed EMD f1 f2
i n
Number of data point
IMFs
Cf k
Adjacent addition IMFs
FIG. 6 THE NORMALIZED STATISTICS OF VIFD
IF
Sliding time window with the same length to the transmitting pulse width
Integrated Detection Method for Underwater Acoutic Fuze On the basis of discussion above, energy detector is suitable to detecting the change of the energy mean of the target signal or the noise, and dont consider their details. On the contrary, VIFD is applied on detailed observations of IF of the echo signal and the interference to detect the target from the reverberation. So this paper presents a novel integrated detection method, where energy detector and VIFD are combined to improve the detection performance of a single detector with the macro and micro information. The structure of integrated detection (ID) method is as shown in Fig.7, where these new adjacent addition IMFs are decomposed from the received acoustic fuze data via the joint processing method with windowed and adjacent addition EMD, and VIFDS IFi and EDS
Ei are
Rectangular sliding time window
VIFDS IFi
EDS E i
Test statistics of ID
Ei
IFi
1: i > r 0 : i r
Test results
FIG. 7 THE FLOW CHART OF ID FOR UNDERWATER ACOUSTIC FUZE
The normalized statistic / dB
0 -10 -20 0 -5 -10 0 -10 -20 400 600 800 1000 1200 1400 1600 1800 2000
Cf1
Cf2
Cf3 Number of data point
FIG. 8 THE NORMALIZED STATISTICS OF ID
obtained from these above IMFs. Thus the test (10)
Engineering Applicaitons In order to verify the detection ability and validity, we take the lake-test fuze echo signal of underwater acoustic target for example, and compare the performance of the integrated detection method with ED and VIFD. The received lake-test fuze echo signal in a received cycle is shown in Fig. 9.
0.4
statistics of the ID method can be shown as
i = Ei IF
i
Assuming the probability of false alarm and the detection threshold r , we have the detection results via binary detection: H1 comes into existence and the target will appear when i > r ; and H 0 exists and there is no a target r when i r . So the ID system for underwater acoustic fuze can be built to detect the underwater target optimally. With the ID method, these normalized test statistics i are shown in Fig. 8, corresponding to Cf1 ~ Cf 3 in Fig. 4, where for Cf1 , the maximum test statistic is 7.2dB
26
Amplitude / A
0.2
-0.2
-0.4
0.5
1.5
2.5
3.5
4.5 x 10
4
Number of data point
FIG. 9 THE ACTUAL UNDERWATER ECHO SIGNAL WITHIN ACOUSTIC PERIOD
Advances in Applied Acoustics Vol. 1 Iss. 1, November 2012
The adjacent addition IMF Cf1 is obtained from the echo signal in Fig. 9 via the joint processing method with windowed and adjacent addition EMD, and the normalized test statistics (the maximum test statistics are 0dB) are calculated and shown as in Fig. 10 through ED, VIFD and ID. And for the three types of detection method, the mean and the second-largest statistics have been listed in Table 1.
0
underwater target, and found that the ID method has more macro and micro information than ED and VIFD, with combining the advantages of ED and VIFD. All these indicate that the ID method has more capacity of reliability and robustness, and holds significant promise in the acoustic fuze detection for the underwater moving target. Conclusions In this paper, a novel integrated detection (ID) method of underwater acoustic fuze based on IEMD, viz., the joint processing method with windowed and adjacent addition EMD, energy detection (ED) and variance-ofinstantaneous-frequency detection (VIFD) is proposed. The proposed method is applied to the underwater acoustic fuze detection, and these testing results are shown as following: 1) The improved EMD method based on the windowed EMD and the adjacent addition EMD can enormously decrease the boundary distortion and over-decomposition phenomena effectively, and has a better decomposition ability, compared with the conventional EMD method. And the IEMD can decompose the target echo signal from the reverberation interference, due to the different mode characteristics between the target echo and the reverberation, and the different modulation characteristic of the transmitted signal between the underwater target and the surface. 2) The ID method has more capacity of antiinterference, reliability and robustness than the single ED or VIFD method, and holds significant promise in the acoustic fuze detection for the underwater moving target.
ACKNOWLEDGMENT
The normalized statistic / dB
ED VIFD ID
-10
-20
-30
-40
0.5
1.5
2.5
3.5
4.5 x 10
4
Number of data point
FIG. 10 THE NORMALIZED STATISTICS OF THREE DETECTION METHODS TABLE 1 THE PERFORMANCE COMPARISON OF THREE ACOUSTIC FUZE DETECTION METHODS Type of detection method ED VIFD ID The test statistics (dB) Mean -5.8 -10.9 -22.5 Second-largest -1.7 -2.1 -5.6
It can be seen from Fig. 10 and Table 1 that for ID method, the test statistic when the target appears is about 22.5dB higher than the average of reverberations, and the detection gain increase to 16.7 dB and 11.6 dB respectively, compared with ED and VIFD. It indicates that the detection performance of ID is greatly improved, and its inhibitory effect for the interference noise (the second-largest test statistic) is better than ED and VIFD. In addition, the number of data point is labeled as P when the value of test statistic is equal to 0, which indicates that the target appears. And the time delay from the target to the received platform can be shown as = P / f s , where f s is the sampling frequency. So the distance R between the target and the acoustic fuze received platform can be shown as
c R= 2
This work was financially supported by the Shaanxi Sc ience and Technology Research and Development Pro gram (NO.2010KJXX-09).
REFERENCES [1]
X.Chen, T. Jiang,X. F. Li, Implementation of On-land Simulation of Torpedo Active Ultrasonic Fuze. Torpedo Technology, 16(5):34-37(2008). S. G. Chamberlain, J. C. Galli, A Model for Numerical Simulation of Nonstationary Sonar Reverberation using Linear Spectral Prediction. IEEE Journal of Oceanic Engineering, 8(1):21-36(1983).
(11)
[2]
Through lots of experiments, the calculation results show that the estimated distances R agreed with the practical conditions. Moreover, we took a large number of underwater acoustic echo signals as testing samples to detect the
27
Advances in Applied Acoustics Vol. 1 Iss. 1, November 2012
[3]
N. E. Huang, Z. Shen, S. R. Long, a New View of Nonlinear Water Waves: the Hilbert Spectrum. Annual Reviews of Fluid Mechanics, 3:417-457(1999).
[9]
Journalof
the
Acoustical
Society
of
America,
116(3):1348-1350(2004). V. I. Kostylev, Energy Detection of A Signal with Random Amplitude. IEEE International Conference on Communication (2002), Russia:Voronezh,, 3(2):16061610.
[10] G. L. Liang, Study on Transient Parameter Sequence of
[4]
Q. Hu, B. A. Hao, L. X. Lv, et al, Hybrid Intelligent Detection for Underwater Acoustic Target Using EMD, Feature Distance Evaluation Technique and FSVDD, International Congress on Image and Signal Processing ( 2008), IEEE,5(4): 54-58. V. Carmillet, P. O. Amblard, G. Jourdain, Detection of Phaseor FrequencyModulated Signals in Reverberation Noise . Journal of the Acoustical Society of America, 105(6):3375-3389(1999). M. K. Steven, Fundamentals of Statistical Signal Processing, Volume II: Detection Theory, Pearson Education Publishers, Prentice Hall PTR (1998). H. C. Song, W. S. Hodgkiss, W. A. Kuperman, Experimental the Acoustical Demonstration Society of of Adaptive 118(3):1381Reverberation Nulling using Time Reversal . Journal of America, 1387(2005).
Echoed Signal and its Application. Harbin Engineering University doctoral dissertation (1997).
[11] Q. Hu, B. A. Hao, L. X. Lv, et al, Feature Extraction
[5]
Model for Underwater Target Radiated Noise. Torpedo Technology, 16(6):38-43(2008). Dr. Qiao Hu received the Bachelor of Science degree in 2001 and the Ph.D. degree in 2006 in Mechanical Engineering from Xian Jiaotong University, P. R. China, and worked as a postdoctoral fellow and is currently a senior engineer both in the 705 research institute, china shipbuilding Industry Corporation. His research interests include underwater acoustic signal processing techniques and hybrid intelligent target detection based on pattern recognition techniques.
[6]
[7]
[8]
D. H. Chambers, J. V. Candy, S. K. Lehman, Time Reversal and the Spatial-temporal Matched Filter.
28
Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- What A Wonderful World - Fingerstyle: Drue JamesDokument3 SeitenWhat A Wonderful World - Fingerstyle: Drue Jamesnitish nairNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Alphabetical List of WebsitesDokument29 SeitenAlphabetical List of Websitesvijay_aashiq100% (1)
- Drumline Auditions 2015 PDFDokument12 SeitenDrumline Auditions 2015 PDFBelajar MarchingNoch keine Bewertungen
- Arcadia High School 1985 Olympian YearbookDokument224 SeitenArcadia High School 1985 Olympian YearbookJohn Telleria100% (2)
- Yi-Fu Tuan Space and PlaceDokument246 SeitenYi-Fu Tuan Space and PlaceKalil Sarraff100% (15)
- Bishop - Lighting The Creative FireDokument12 SeitenBishop - Lighting The Creative FirePascanu VasileNoch keine Bewertungen
- Qualcomm Bluetooth Mesh Product Brief 87 Ce928 1Dokument2 SeitenQualcomm Bluetooth Mesh Product Brief 87 Ce928 1Maman BudimanNoch keine Bewertungen
- Huawei Lampsite Solution Overview 01Dokument10 SeitenHuawei Lampsite Solution Overview 01Roberto TRNoch keine Bewertungen
- PDFDokument8 SeitenPDFdieguito-moralesNoch keine Bewertungen
- Mill's Critique of Bentham's UtilitarianismDokument9 SeitenMill's Critique of Bentham's UtilitarianismSEP-PublisherNoch keine Bewertungen
- Antoine Priore (Electromagnetic Healing France 1974)Dokument156 SeitenAntoine Priore (Electromagnetic Healing France 1974)carlesavila2246100% (1)
- Influence of Aluminum Oxide Nanofibers Reinforcing Polyethylene Coating On The Abrasive WearDokument13 SeitenInfluence of Aluminum Oxide Nanofibers Reinforcing Polyethylene Coating On The Abrasive WearSEP-PublisherNoch keine Bewertungen
- Effect of Slip Velocity On The Performance of A Magnetic Fluid Based Squeeze Film in Porous Rough Infinitely Long Parallel PlatesDokument11 SeitenEffect of Slip Velocity On The Performance of A Magnetic Fluid Based Squeeze Film in Porous Rough Infinitely Long Parallel PlatesSEP-PublisherNoch keine Bewertungen
- Improving of Motor and Tractor's Reliability by The Use of Metalorganic Lubricant AdditivesDokument5 SeitenImproving of Motor and Tractor's Reliability by The Use of Metalorganic Lubricant AdditivesSEP-PublisherNoch keine Bewertungen
- Contact Characteristics of Metallic Materials in Conditions of Heavy Loading by Friction or by Electric CurrentDokument7 SeitenContact Characteristics of Metallic Materials in Conditions of Heavy Loading by Friction or by Electric CurrentSEP-PublisherNoch keine Bewertungen
- Experimental Investigation of Friction Coefficient and Wear Rate of Stainless Steel 202 Sliding Against Smooth and Rough Stainless Steel 304 Couter-FacesDokument8 SeitenExperimental Investigation of Friction Coefficient and Wear Rate of Stainless Steel 202 Sliding Against Smooth and Rough Stainless Steel 304 Couter-FacesSEP-PublisherNoch keine Bewertungen
- Microstructure and Wear Properties of Laser Clad NiCrBSi-MoS2 CoatingDokument5 SeitenMicrostructure and Wear Properties of Laser Clad NiCrBSi-MoS2 CoatingSEP-PublisherNoch keine Bewertungen
- Microstructural Development in Friction Welded Aluminum Alloy With Different Alumina Specimen GeometriesDokument7 SeitenMicrostructural Development in Friction Welded Aluminum Alloy With Different Alumina Specimen GeometriesSEP-PublisherNoch keine Bewertungen
- FWR008Dokument5 SeitenFWR008sreejith2786Noch keine Bewertungen
- Device For Checking The Surface Finish of Substrates by Tribometry MethodDokument5 SeitenDevice For Checking The Surface Finish of Substrates by Tribometry MethodSEP-PublisherNoch keine Bewertungen
- Enhancing Wear Resistance of En45 Spring Steel Using Cryogenic TreatmentDokument6 SeitenEnhancing Wear Resistance of En45 Spring Steel Using Cryogenic TreatmentSEP-PublisherNoch keine Bewertungen
- Reaction Between Polyol-Esters and Phosphate Esters in The Presence of Metal CarbidesDokument9 SeitenReaction Between Polyol-Esters and Phosphate Esters in The Presence of Metal CarbidesSEP-PublisherNoch keine Bewertungen
- Quantum Meditation: The Self-Spirit ProjectionDokument8 SeitenQuantum Meditation: The Self-Spirit ProjectionSEP-PublisherNoch keine Bewertungen
- Delightful: The Saturation Spirit Energy DistributionDokument4 SeitenDelightful: The Saturation Spirit Energy DistributionSEP-PublisherNoch keine Bewertungen
- Technological Mediation of Ontologies: The Need For Tools To Help Designers in Materializing EthicsDokument9 SeitenTechnological Mediation of Ontologies: The Need For Tools To Help Designers in Materializing EthicsSEP-PublisherNoch keine Bewertungen
- Mindfulness and Happiness: The Empirical FoundationDokument7 SeitenMindfulness and Happiness: The Empirical FoundationSEP-PublisherNoch keine Bewertungen
- Social Conflicts in Virtual Reality of Computer GamesDokument5 SeitenSocial Conflicts in Virtual Reality of Computer GamesSEP-PublisherNoch keine Bewertungen
- Enhanced Causation For DesignDokument14 SeitenEnhanced Causation For DesignSEP-PublisherNoch keine Bewertungen
- Cold Mind: The Released Suffering StabilityDokument3 SeitenCold Mind: The Released Suffering StabilitySEP-PublisherNoch keine Bewertungen
- Isage: A Virtual Philosopher System For Learning Traditional Chinese PhilosophyDokument8 SeitenIsage: A Virtual Philosopher System For Learning Traditional Chinese PhilosophySEP-PublisherNoch keine Bewertungen
- Ontology-Based Testing System For Evaluation of Student's KnowledgeDokument8 SeitenOntology-Based Testing System For Evaluation of Student's KnowledgeSEP-PublisherNoch keine Bewertungen
- Metaphysics of AdvertisingDokument10 SeitenMetaphysics of AdvertisingSEP-PublisherNoch keine Bewertungen
- Architectural Images in Buddhist Scriptures, Buddhism Truth and Oriental Spirit WorldDokument5 SeitenArchitectural Images in Buddhist Scriptures, Buddhism Truth and Oriental Spirit WorldSEP-PublisherNoch keine Bewertungen
- A Tentative Study On The View of Marxist Philosophy of Human NatureDokument4 SeitenA Tentative Study On The View of Marxist Philosophy of Human NatureSEP-PublisherNoch keine Bewertungen
- The Effect of Boundary Conditions On The Natural Vibration Characteristics of Deep-Hole Bulkhead GateDokument8 SeitenThe Effect of Boundary Conditions On The Natural Vibration Characteristics of Deep-Hole Bulkhead GateSEP-PublisherNoch keine Bewertungen
- Computational Fluid Dynamics Based Design of Sump of A Hydraulic Pumping System-CFD Based Design of SumpDokument6 SeitenComputational Fluid Dynamics Based Design of Sump of A Hydraulic Pumping System-CFD Based Design of SumpSEP-PublisherNoch keine Bewertungen
- Legal Distinctions Between Clinical Research and Clinical Investigation:Lessons From A Professional Misconduct TrialDokument4 SeitenLegal Distinctions Between Clinical Research and Clinical Investigation:Lessons From A Professional Misconduct TrialSEP-PublisherNoch keine Bewertungen
- Damage Structures Modal Analysis Virtual Flexibility Matrix (VFM) IdentificationDokument10 SeitenDamage Structures Modal Analysis Virtual Flexibility Matrix (VFM) IdentificationSEP-PublisherNoch keine Bewertungen
- ST Louis Vis Is To Rs Guide 2011Dokument118 SeitenST Louis Vis Is To Rs Guide 2011johnsm2010Noch keine Bewertungen
- GD Satcom 3.7M Assembly Manual 4096-225Dokument32 SeitenGD Satcom 3.7M Assembly Manual 4096-225jrdmaNoch keine Bewertungen
- Sanctus - Schubert PDFDokument1 SeiteSanctus - Schubert PDFManado Chamber SingersNoch keine Bewertungen
- Product Specifications Product Specifications: Cellmax Cellmax - O O - Cpuse CpuseDokument2 SeitenProduct Specifications Product Specifications: Cellmax Cellmax - O O - Cpuse CpuseAndriy SemenNoch keine Bewertungen
- Desperate Housewives S1E2Dokument12 SeitenDesperate Housewives S1E2AmiableNoch keine Bewertungen
- Napoleon AbuevaDokument5 SeitenNapoleon AbuevaShiba MahesvaraNoch keine Bewertungen
- EC2208 Lab ManualDokument2 SeitenEC2208 Lab ManualImmanuel JsrNoch keine Bewertungen
- Company ProfileDokument11 SeitenCompany ProfileJose Leonardo Gomez0% (1)
- Huawei RNP User Manual v1.0Dokument324 SeitenHuawei RNP User Manual v1.0b0r3l_01Noch keine Bewertungen
- 88 Present-Progressive USDokument19 Seiten88 Present-Progressive USBeatriz da Silva RibeiroNoch keine Bewertungen
- User ManualDrakan PS2Dokument20 SeitenUser ManualDrakan PS2Daniel MartínNoch keine Bewertungen
- Chanakya NeetiDokument27 SeitenChanakya NeetiDeepayancNoch keine Bewertungen
- A High-Capacity Transmission Technique Using A Wide Range of Frequencies, Which Enables A Large Number of Messages To Be Communicated SimultaneouslyDokument1 SeiteA High-Capacity Transmission Technique Using A Wide Range of Frequencies, Which Enables A Large Number of Messages To Be Communicated Simultaneouslymukhtar omerNoch keine Bewertungen
- Fracture From The King Crimson)Dokument16 SeitenFracture From The King Crimson)Dave ToddNoch keine Bewertungen
- Bach Marcha in EB MajorDokument2 SeitenBach Marcha in EB MajorLucas BritoNoch keine Bewertungen
- Q2 First Summative Test in Music6Dokument2 SeitenQ2 First Summative Test in Music6Rosendo Aque100% (1)
- Pinoy Hip HopDokument16 SeitenPinoy Hip HopAlwynBaloCruzNoch keine Bewertungen
- Polyphonic Octave Generator: WARNING: Use Only The 9.6 VDC 200ma Adapter TheDokument2 SeitenPolyphonic Octave Generator: WARNING: Use Only The 9.6 VDC 200ma Adapter Thecaretakerica0% (1)
- Projector Epson EB-980WDokument5 SeitenProjector Epson EB-980WVajar Ramdan ZaoldyeckNoch keine Bewertungen
- The Ecstasy of Gold: Arr. Lorenzo Bocci Words and Music by Ennio MorriconeDokument7 SeitenThe Ecstasy of Gold: Arr. Lorenzo Bocci Words and Music by Ennio MorriconeCapoNatillaNoch keine Bewertungen