Das könnte Ihnen auch gefallen
- AbdulDokument1 SeiteAbdulJuhi SinghNoch keine Bewertungen
- Diploma Trainee-2013: Registration Slip SR HQ, HyderabadDokument1 SeiteDiploma Trainee-2013: Registration Slip SR HQ, HyderabadJuhi SinghNoch keine Bewertungen
- FormulaDokument4 SeitenFormulaJuhi SinghNoch keine Bewertungen
- IRCTC LTD, Booked Ticket PrintingDokument2 SeitenIRCTC LTD, Booked Ticket PrintingJuhi SinghNoch keine Bewertungen
- FormulaDokument4 SeitenFormulaJuhi SinghNoch keine Bewertungen
- CV FormateDokument2 SeitenCV FormateJuhi SinghNoch keine Bewertungen
- JKKKLLDokument1 SeiteJKKKLLJuhi SinghNoch keine Bewertungen
- ResumeDokument4 SeitenResumeJuhi SinghNoch keine Bewertungen
- G.A Drawing of TankDokument1 SeiteG.A Drawing of TankJuhi SinghNoch keine Bewertungen
- TGC 120 543809arpit KhannaDokument4 SeitenTGC 120 543809arpit KhannaJuhi SinghNoch keine Bewertungen
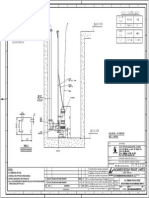
- Ga-Sale10000278 10-Submersible Pump Set R2-ModelDokument1 SeiteGa-Sale10000278 10-Submersible Pump Set R2-ModelJuhi SinghNoch keine Bewertungen
- NANDAN 1 1 (1) ADokument2 SeitenNANDAN 1 1 (1) AJuhi SinghNoch keine Bewertungen
- Cover Sheet - Pneumatic Circuit (Bunkar Discharge Gate)Dokument2 SeitenCover Sheet - Pneumatic Circuit (Bunkar Discharge Gate)Juhi SinghNoch keine Bewertungen
- C-1060-77890D-2-R-1 ModelDokument1 SeiteC-1060-77890D-2-R-1 ModelJuhi SinghNoch keine Bewertungen
- Cover Sheet - Pneumatic Circuit (Denseveyor)Dokument3 SeitenCover Sheet - Pneumatic Circuit (Denseveyor)Juhi SinghNoch keine Bewertungen
- 01 & 02.Str - Ga of Mill Reject Bunker-1 ApprovedDokument1 Seite01 & 02.Str - Ga of Mill Reject Bunker-1 ApprovedJuhi SinghNoch keine Bewertungen
- Tir2 Epc Mrs DM D 008 Sh2 r6Dokument1 SeiteTir2 Epc Mrs DM D 008 Sh2 r6Juhi SinghNoch keine Bewertungen
- BE-A-402-020294-0-R-0 ModelDokument1 SeiteBE-A-402-020294-0-R-0 ModelJuhi SinghNoch keine Bewertungen
- Control Write Up A388Dokument57 SeitenControl Write Up A388Juhi SinghNoch keine Bewertungen
- Tir1-Epc-Mrs-Dm-D-008-Sh-1, R-6Dokument1 SeiteTir1-Epc-Mrs-Dm-D-008-Sh-1, R-6Juhi SinghNoch keine Bewertungen
- BE-A-402-020234-0-R-0 ModelDokument1 SeiteBE-A-402-020234-0-R-0 ModelJuhi SinghNoch keine Bewertungen
- C-1060-77890D-1-R-1 ModelDokument1 SeiteC-1060-77890D-1-R-1 ModelJuhi SinghNoch keine Bewertungen
- BE-A-402-020295-0-R-0 ModelDokument1 SeiteBE-A-402-020295-0-R-0 ModelJuhi SinghNoch keine Bewertungen
- BE-A-402-020213-0-R-1 ModelDokument1 SeiteBE-A-402-020213-0-R-1 ModelJuhi SinghNoch keine Bewertungen
- BE-A-402-020095-1-R-2 ModelDokument1 SeiteBE-A-402-020095-1-R-2 ModelJuhi SinghNoch keine Bewertungen
- BE-A-402-020219-0-R-1 ModelDokument1 SeiteBE-A-402-020219-0-R-1 ModelJuhi SinghNoch keine Bewertungen
- BE-A-402-020234-0-R-0 ModelDokument1 SeiteBE-A-402-020234-0-R-0 ModelJuhi SinghNoch keine Bewertungen
- BE-A-402-020213-0-R-1 ModelDokument1 SeiteBE-A-402-020213-0-R-1 ModelJuhi SinghNoch keine Bewertungen
- Be-A-402-020039 - Detail of Clear Water Tank Roof (r1)Dokument1 SeiteBe-A-402-020039 - Detail of Clear Water Tank Roof (r1)Juhi SinghNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Fama Fraternitatis Rosae Crucis PDFDokument2 SeitenFama Fraternitatis Rosae Crucis PDFJudy50% (2)
- Upaam 1135891 202105060749199700Dokument18 SeitenUpaam 1135891 202105060749199700Kartik KapoorNoch keine Bewertungen
- Final Thesis - Aris PotliopoulosDokument94 SeitenFinal Thesis - Aris PotliopoulosCristinaNoch keine Bewertungen
- Biomediacal Waste Project FinalDokument43 SeitenBiomediacal Waste Project Finalashoknr100% (1)
- 10th Aug. 2011 Structural Calculation (For Sub.) - 03Dokument29 Seiten10th Aug. 2011 Structural Calculation (For Sub.) - 03Nguyễn Tiến Việt100% (1)
- Intel Stratix 10 Avalon - MM Interface For PCI Express Solutions User GuideDokument173 SeitenIntel Stratix 10 Avalon - MM Interface For PCI Express Solutions User Guideenoch richardNoch keine Bewertungen
- VTA28-G5: Fuel OptimizedDokument3 SeitenVTA28-G5: Fuel OptimizedIslam HemdanNoch keine Bewertungen
- HY-TB3DV-M 3axis Driver PDFDokument10 SeitenHY-TB3DV-M 3axis Driver PDFjoelgcrNoch keine Bewertungen
- Armor MagazineDokument32 SeitenArmor Magazine"Rufus"100% (1)
- Cac de Luyen ThiDokument18 SeitenCac de Luyen ThiVinh Dao CongNoch keine Bewertungen
- Abnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorDokument21 SeitenAbnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorGopala KrishnanNoch keine Bewertungen
- Academic Reading: All Answers Must Be Written On The Answer SheetDokument21 SeitenAcademic Reading: All Answers Must Be Written On The Answer SheetLemon MahamudNoch keine Bewertungen
- Active Faults in MalaysiaDokument52 SeitenActive Faults in MalaysiaHazim HaNoch keine Bewertungen
- 2 Contoh Narative TextDokument9 Seiten2 Contoh Narative TextRini RienzNoch keine Bewertungen
- Digital Signal Processing: B.E Ece (5Th Semester)Dokument17 SeitenDigital Signal Processing: B.E Ece (5Th Semester)Saatwat CoolNoch keine Bewertungen
- Superposition and Statically Indetermina - GDLCDokument25 SeitenSuperposition and Statically Indetermina - GDLCAnonymous frFFmeNoch keine Bewertungen
- Salem RPGDokument16 SeitenSalem RPGabstockingNoch keine Bewertungen
- SR6 Core Rulebook Errata Feb 2020Dokument6 SeitenSR6 Core Rulebook Errata Feb 2020yrtalienNoch keine Bewertungen
- Brief Summary of Catalytic ConverterDokument23 SeitenBrief Summary of Catalytic ConverterjoelNoch keine Bewertungen
- Aesculap Saw GD307 - Service ManualDokument16 SeitenAesculap Saw GD307 - Service ManualFredi PançiNoch keine Bewertungen
- Kodak Easyshare Z712 Is Zoom Digital Camera: User'S GuideDokument75 SeitenKodak Easyshare Z712 Is Zoom Digital Camera: User'S GuideIronko PepeNoch keine Bewertungen
- Material Requirement Planning (MRP)Dokument55 SeitenMaterial Requirement Planning (MRP)Lisa CarlsonNoch keine Bewertungen
- Class 12 - Maths - MatricesDokument87 SeitenClass 12 - Maths - MatricesAishwarya MishraNoch keine Bewertungen
- 3.1 - Sequences and SeriesxbxhhdDokument92 Seiten3.1 - Sequences and SeriesxbxhhdHelloNoch keine Bewertungen
- ME 352 Design of Machine Elements: Lab ReportDokument5 SeitenME 352 Design of Machine Elements: Lab ReportKeshav VermaNoch keine Bewertungen
- Dell W2306C LCD Monitor Service ManualDokument104 SeitenDell W2306C LCD Monitor Service ManualIsrael B ChavezNoch keine Bewertungen
- Crashing Is A Schedule Compression Technique Used To Reduce or Shorten The Project ScheduleDokument1 SeiteCrashing Is A Schedule Compression Technique Used To Reduce or Shorten The Project ScheduleRaymart BulagsacNoch keine Bewertungen
- AR BuildingDokument819 SeitenAR BuildingShithin KrishnanNoch keine Bewertungen
- Convection Concentric Annulus Vertical Cylinders Filling Porous MediaDokument17 SeitenConvection Concentric Annulus Vertical Cylinders Filling Porous MediakarthikeyanNoch keine Bewertungen
- Differential Geometry of Curves and Surfaces 3. Regular SurfacesDokument16 SeitenDifferential Geometry of Curves and Surfaces 3. Regular SurfacesyrodroNoch keine Bewertungen