Das könnte Ihnen auch gefallen
- 1 - Introduction To Introduction To Control Design ToolkitDokument8 Seiten1 - Introduction To Introduction To Control Design Toolkitahmed4665Noch keine Bewertungen
- 8 - Design Control SimulationDokument88 Seiten8 - Design Control Simulationahmed4665Noch keine Bewertungen
- Getting Started With The System Identification Assistant 3Dokument65 SeitenGetting Started With The System Identification Assistant 3ahmed4665100% (1)
- 2 - Constructing and Connecting Dynamic SystemDokument61 Seiten2 - Constructing and Connecting Dynamic Systemahmed4665Noch keine Bewertungen
- 5 - Stability & Root LocusDokument10 Seiten5 - Stability & Root Locusahmed4665Noch keine Bewertungen
- Data Acquisition (DAQ) 1Dokument57 SeitenData Acquisition (DAQ) 1ahmed4665100% (1)
- 4 - Frequency Response AnalysisDokument30 Seiten4 - Frequency Response Analysisahmed4665Noch keine Bewertungen
- AC Signals & SamplingDokument10 SeitenAC Signals & Samplingahmed4665Noch keine Bewertungen
- 3 - Time Response AnalysisDokument24 Seiten3 - Time Response Analysisahmed4665Noch keine Bewertungen
- How To Communicate With Parallel PortDokument24 SeitenHow To Communicate With Parallel Portahmed4665100% (6)
- 6 - Analyzing State-Space CharacteristicDokument20 Seiten6 - Analyzing State-Space Characteristicahmed4665100% (1)
- Counters and DAQDokument61 SeitenCounters and DAQahmed4665Noch keine Bewertungen
- PidDokument15 SeitenPidahmed4665100% (1)
- Generate Continuous Signals Using 6211Dokument27 SeitenGenerate Continuous Signals Using 6211ahmed4665100% (1)
- How To Use 6211Dokument23 SeitenHow To Use 6211ahmed4665Noch keine Bewertungen
- PID Hardware Real Time SimulationDokument12 SeitenPID Hardware Real Time Simulationahmed4665Noch keine Bewertungen
- Dynamic DataDokument13 SeitenDynamic Dataahmed4665100% (1)
- ParallelismDokument16 SeitenParallelismahmed4665Noch keine Bewertungen
- Input Output Files FormatDokument62 SeitenInput Output Files Formatahmed4665Noch keine Bewertungen
- LabVIEW MathscripDokument37 SeitenLabVIEW Mathscripahmed4665Noch keine Bewertungen
- Reading and Writing Audio Files in LabVIEWDokument15 SeitenReading and Writing Audio Files in LabVIEWahmed4665Noch keine Bewertungen
- State MachinesDokument28 SeitenState Machinesahmed4665Noch keine Bewertungen
- LabVIEW ClustersDokument9 SeitenLabVIEW Clustersahmed4665Noch keine Bewertungen
- LabVIEW Charts & GraphsDokument29 SeitenLabVIEW Charts & Graphsahmed4665100% (1)
- Wave FormsDokument30 SeitenWave Formsahmed4665Noch keine Bewertungen
- Labview File IoDokument18 SeitenLabview File Ioahmed4665Noch keine Bewertungen
- LabVIEW ArraysDokument17 SeitenLabVIEW Arraysahmed4665100% (2)
- LabVIEW Data Types & Conversions Between These TypesDokument23 SeitenLabVIEW Data Types & Conversions Between These Typesahmed4665100% (4)
- LabVIEW Programming Environment and Basic OperationsDokument55 SeitenLabVIEW Programming Environment and Basic Operationsahmed4665100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- DCP551 Mark Digital Control Programmer User's Manual: EN1I-6186 Issue 11 (11/06)Dokument230 SeitenDCP551 Mark Digital Control Programmer User's Manual: EN1I-6186 Issue 11 (11/06)kmpoulosNoch keine Bewertungen
- 02 PIDcontroller PDFDokument5 Seiten02 PIDcontroller PDFZugravu AndreiNoch keine Bewertungen
- Maestro XS PDFDokument134 SeitenMaestro XS PDFRenato García Espinosa100% (1)
- Control Systems and Simulation Lab: Mr. T.Ravi Babu Assistant Professor, EEEDokument83 SeitenControl Systems and Simulation Lab: Mr. T.Ravi Babu Assistant Professor, EEEVikram Nani MudhirajNoch keine Bewertungen
- VLT 3000 To VLT FC 302 Converter Operating Instructions MG33P102Dokument14 SeitenVLT 3000 To VLT FC 302 Converter Operating Instructions MG33P102vudinhhoang_dinhvietNoch keine Bewertungen
- FB1200 Flow Computer: Mobile SCADA™ With Wi-FiDokument20 SeitenFB1200 Flow Computer: Mobile SCADA™ With Wi-FiNahuel CarballidoNoch keine Bewertungen
- Modeling, Simulation and Control of A Robotic Arm PDFDokument7 SeitenModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNoch keine Bewertungen
- 1727.UCD3138 Control TheoryDokument49 Seiten1727.UCD3138 Control Theorywwahib2100% (1)
- Marlin Ch14 PDFDokument26 SeitenMarlin Ch14 PDFAlyaNoch keine Bewertungen
- Ibanez Thermion Tube Amplifier TN120 SchematicDokument32 SeitenIbanez Thermion Tube Amplifier TN120 Schematicbilly07Noch keine Bewertungen
- Woodward - Egcp - Operation ManualDokument224 SeitenWoodward - Egcp - Operation Manualvicbto100% (2)
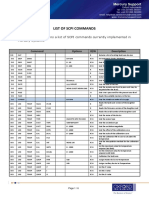
- List of SCPI CommandsDokument6 SeitenList of SCPI CommandsRobert SavulescuNoch keine Bewertungen
- CHC - 309 / CHC - 310 Instrumentation Process Control Question BankDokument105 SeitenCHC - 309 / CHC - 310 Instrumentation Process Control Question BankVaibhav PardeshiNoch keine Bewertungen
- An Enhanced Iterative Process For Maintaining APC ApplicationsDokument18 SeitenAn Enhanced Iterative Process For Maintaining APC ApplicationsahmadNoch keine Bewertungen
- Luminato Configuration GuidelinesDokument68 SeitenLuminato Configuration GuidelinesEmin HukicNoch keine Bewertungen
- Process Control Instrumentation - InstrumentationToolsDokument15 SeitenProcess Control Instrumentation - InstrumentationToolsCarlos JimenezNoch keine Bewertungen
- Quick Reference Guide: For Model C35/36Dokument8 SeitenQuick Reference Guide: For Model C35/36SerhiiNoch keine Bewertungen
- D. Dubois, H. Prade (Auth.), M. J. Patyra, D. M. Mlynek (Eds.) - Fuzzy Logic - Implementation and Applications-Vieweg+Teubner Verlag (1996)Dokument325 SeitenD. Dubois, H. Prade (Auth.), M. J. Patyra, D. M. Mlynek (Eds.) - Fuzzy Logic - Implementation and Applications-Vieweg+Teubner Verlag (1996)bathaie_mohammadNoch keine Bewertungen
- System Identification Methods for Discrete Data SystemsDokument12 SeitenSystem Identification Methods for Discrete Data SystemslvrevathiNoch keine Bewertungen
- Four layers of process plant protectionDokument41 SeitenFour layers of process plant protectionSrinivas BobbyNoch keine Bewertungen
- Finn Haugen. Telemark University College National Instruments ConfidentialDokument27 SeitenFinn Haugen. Telemark University College National Instruments ConfidentialtriplbingaziNoch keine Bewertungen
- Regeln Pid Compactv2 Doku v1 0 enDokument56 SeitenRegeln Pid Compactv2 Doku v1 0 enRafael DavidNoch keine Bewertungen
- IRSources WWW11 12 10 - 000Dokument89 SeitenIRSources WWW11 12 10 - 000Gustavo UgioniNoch keine Bewertungen
- PIC18CXXX/PIC16CXXX DC Servomotor Application: Author: Stephen Bowling Microchip Technology Inc. Chandler, AZDokument49 SeitenPIC18CXXX/PIC16CXXX DC Servomotor Application: Author: Stephen Bowling Microchip Technology Inc. Chandler, AZAdnen GuedriaNoch keine Bewertungen
- System Block Diagram PDFDokument3 SeitenSystem Block Diagram PDFASOCIACION ATECUBONoch keine Bewertungen
- PID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper MotorsDokument4 SeitenPID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper Motorsprateek agarwalNoch keine Bewertungen
- Quadcopter Plant Model and Control System Development With MATLAB/Simulink ImplementationDokument129 SeitenQuadcopter Plant Model and Control System Development With MATLAB/Simulink ImplementationBharath Kumar PNoch keine Bewertungen
- Anti-Windup Schemes For Proportional Integral and Proportional Resonant ControllerDokument6 SeitenAnti-Windup Schemes For Proportional Integral and Proportional Resonant ControllerAtakan OzturKNoch keine Bewertungen
- Chapter 7: Steady State Error Analysis: Test Waveforms For Evaluating Steady-State Errors of Position Control SystemsDokument9 SeitenChapter 7: Steady State Error Analysis: Test Waveforms For Evaluating Steady-State Errors of Position Control Systemsarunkumar SNoch keine Bewertungen