Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Assignment-3: - B. H. Gardi College of Engineering & TechnologyDokument1 SeiteAssignment-3: - B. H. Gardi College of Engineering & TechnologyDevang_GhiyaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Assignment-2: - B. H. Gardi College of Engineering & TechnologyDokument1 SeiteAssignment-2: - B. H. Gardi College of Engineering & TechnologyDevang_GhiyaNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Department of Computer Science & Engineering Compiler Design Lab ManualDokument2 SeitenDepartment of Computer Science & Engineering Compiler Design Lab ManualDevang_GhiyaNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Introduction To Yacc: Ying-Hung JiangDokument11 SeitenIntroduction To Yacc: Ying-Hung JiangDevang_GhiyaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Fuzzy LogicDokument21 SeitenFuzzy LogicDevang_Ghiya0% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Ibms Stenden 2014Dokument7 SeitenIbms Stenden 2014aamedNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Attitudes Towards Error Correction in The Romanian ContextDokument7 SeitenAttitudes Towards Error Correction in The Romanian ContexthannahNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
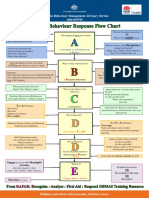
- Behaviour Response Flow Chart 5 Nov 2012Dokument1 SeiteBehaviour Response Flow Chart 5 Nov 2012jakilaNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Tws 4 Lesson Plan 4Dokument14 SeitenTws 4 Lesson Plan 4api-236766479Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Group 1 - Foundational Learning Theories of Behaviorism, Cognitivitism, ConstructivismDokument8 SeitenGroup 1 - Foundational Learning Theories of Behaviorism, Cognitivitism, ConstructivismAkanshaNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Individual Report QuestionDokument7 SeitenIndividual Report QuestionFang May YeohNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Structure of ConversationsDokument42 SeitenThe Structure of ConversationsCarlos RojasNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Social EntrepreneurshipDokument14 SeitenSocial EntrepreneurshipRaquel FranciscoNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Professional Education Drill 9 - Part 1Dokument5 SeitenProfessional Education Drill 9 - Part 1Seph TorresNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Reading Rubric 1st GradeDokument1 SeiteReading Rubric 1st GradeAna Galvez SchulerNoch keine Bewertungen
- Edu 230-ResumeDokument3 SeitenEdu 230-Resumeapi-242289094Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Empowerment Technology M3999Dokument1 SeiteEmpowerment Technology M3999Ericka Rivera SantosNoch keine Bewertungen
- Ressource 730Dokument270 SeitenRessource 730wimbo809Noch keine Bewertungen
- Systems Analysis: Constraints of A SystemDokument2 SeitenSystems Analysis: Constraints of A SystemAira Kristel RomuloNoch keine Bewertungen
- Soyarslan, PHD Dissertation, Duke 2011, Reason and Intuitive Knowledge in Spinoza's EthicsDokument337 SeitenSoyarslan, PHD Dissertation, Duke 2011, Reason and Intuitive Knowledge in Spinoza's EthicsFranciscoNoch keine Bewertungen
- Word-Building: (Cf. A Friend)Dokument9 SeitenWord-Building: (Cf. A Friend)Діана ПримакNoch keine Bewertungen
- MOTP Assignment 1 Mentor Plan PreparationDokument2 SeitenMOTP Assignment 1 Mentor Plan PreparationJosephine TorresNoch keine Bewertungen
- Organizational Change and Development Chapter 12Dokument27 SeitenOrganizational Change and Development Chapter 12Basavaraj PatilNoch keine Bewertungen
- Confusing Pairs 2016Dokument1 SeiteConfusing Pairs 2016EsinedMegNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Week 1 and 2 - Scope of Science & The Scientific MethodDokument9 SeitenWeek 1 and 2 - Scope of Science & The Scientific MethodArchie FloresNoch keine Bewertungen
- Critical Thinking Chapter 3 ExercisesDokument3 SeitenCritical Thinking Chapter 3 ExercisesSparshita BeriNoch keine Bewertungen
- Augustinian LeadershipDokument33 SeitenAugustinian LeadershipEnrico HidalgoNoch keine Bewertungen
- Sample Course SpecifDokument3 SeitenSample Course SpecifAnonymous 2h5lIeNoch keine Bewertungen
- Strategic Lenses PDFDokument7 SeitenStrategic Lenses PDFPriyal RoyNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- IELTS Reading TestsDokument148 SeitenIELTS Reading Testsnha_mat_pho_bo_lam_to93100% (1)
- Internship Plan SampleDokument2 SeitenInternship Plan SampleLily Antonette AgustinNoch keine Bewertungen
- Purpose Statment PDFDokument2 SeitenPurpose Statment PDFZohaibShoukatBalochNoch keine Bewertungen
- The Danger of A Single StoryDokument3 SeitenThe Danger of A Single StoryPaijen Joy Quiambao AlasNoch keine Bewertungen
- Bertrand RussellDokument23 SeitenBertrand RussellNikhil LallNoch keine Bewertungen
- Learning Module II - Teaching Profession Lesson 3 - The Demands of Society From The Teacher As A ProfessionalDokument8 SeitenLearning Module II - Teaching Profession Lesson 3 - The Demands of Society From The Teacher As A ProfessionalWincel Ann GoNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)