Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Risk-adjusted discount rates and certainty equivalents in capital budgetingDokument10 SeitenRisk-adjusted discount rates and certainty equivalents in capital budgetingAjmal SalamNoch keine Bewertungen
- A Hybrid Cold Gas Microthruster System For SpacecraftDokument12 SeitenA Hybrid Cold Gas Microthruster System For SpacecraftAjmal SalamNoch keine Bewertungen
- Account OpeningDokument1 SeiteAccount OpeningAjmal SalamNoch keine Bewertungen
- Visa Application Form 2012Dokument2 SeitenVisa Application Form 2012Honey OliverosNoch keine Bewertungen
- Design, Manufacturing and Testing of A HALE-UAV Structural DemonstratorDokument11 SeitenDesign, Manufacturing and Testing of A HALE-UAV Structural DemonstratorVU Dinh-QuyNoch keine Bewertungen
- CMA Part 2 Financial Decision Making Cram SessionDokument190 SeitenCMA Part 2 Financial Decision Making Cram SessionElenaIvanovaNoch keine Bewertungen
- Weighted Average Cost of Capital (WACC) QuestionsDokument19 SeitenWeighted Average Cost of Capital (WACC) QuestionsAjmal Salam100% (1)
- Analyzing Financial Ratios to Evaluate Loan ApplicationsDokument98 SeitenAnalyzing Financial Ratios to Evaluate Loan ApplicationsAjmal SalamNoch keine Bewertungen
- Financial Instruments DoneDokument21 SeitenFinancial Instruments DoneAjmal SalamNoch keine Bewertungen
- Home Centre 2014 Uae Eng - PDFDokument139 SeitenHome Centre 2014 Uae Eng - PDFAjmal Salam0% (1)
- Analytical Issues in Financial AccountingDokument33 SeitenAnalytical Issues in Financial AccountingSwathi AshokNoch keine Bewertungen
- Compo EconomicsDokument48 SeitenCompo EconomicsAjmal SalamNoch keine Bewertungen
- Capital Budgeting ProcessDokument17 SeitenCapital Budgeting ProcessAjmal SalamNoch keine Bewertungen
- Basic Financial Statements Analysis DoneDokument17 SeitenBasic Financial Statements Analysis DoneAjmal SalamNoch keine Bewertungen
- Mec403 2009Dokument2 SeitenMec403 2009Ajmal SalamNoch keine Bewertungen
- Theory and Application of TurbulenceDokument4 SeitenTheory and Application of TurbulenceAjmal SalamNoch keine Bewertungen
- Concept Evaluation - NotesDokument13 SeitenConcept Evaluation - NotesAjmal SalamNoch keine Bewertungen
- The Merits of Cold Gas Micropropulsion in State-Of-The-Art Space MissionsDokument8 SeitenThe Merits of Cold Gas Micropropulsion in State-Of-The-Art Space Missionsmahnaj1Noch keine Bewertungen
- Design and Fabrication of A Resonant Micro Reciprocating Engine For Power GenerationDokument5 SeitenDesign and Fabrication of A Resonant Micro Reciprocating Engine For Power GenerationAjmal SalamNoch keine Bewertungen
- Statistical Description of TurbulenceDokument11 SeitenStatistical Description of TurbulenceAjmal SalamNoch keine Bewertungen
- Form 1 ADokument1 SeiteForm 1 ANicholas BrownNoch keine Bewertungen
- RTM PaperDokument9 SeitenRTM PaperRebecca TurnerNoch keine Bewertungen
- Malaysian Visa Application FormDokument2 SeitenMalaysian Visa Application Formdrshuja911Noch keine Bewertungen
- Maintaining Geostationary Satellites with Pulsed Plasma ThrustersDokument6 SeitenMaintaining Geostationary Satellites with Pulsed Plasma ThrustersAjmal SalamNoch keine Bewertungen
- Earth SummitDokument13 SeitenEarth SummitAjmal SalamNoch keine Bewertungen
- Comparison of STudy of Active Head RestraintsDokument8 SeitenComparison of STudy of Active Head RestraintsAjmal SalamNoch keine Bewertungen
- Outcomes of The Rio Earth SummitDokument37 SeitenOutcomes of The Rio Earth SummitAjmal Salam100% (1)
- Earth's 9 critical life-support systems under threatDokument1 SeiteEarth's 9 critical life-support systems under threatAjmal SalamNoch keine Bewertungen
- CoNGO CSD Earth Summit 2012 Discussion PaperDokument5 SeitenCoNGO CSD Earth Summit 2012 Discussion PaperJan DashNoch keine Bewertungen
- BBM For Ios-1-0 User GuideDokument17 SeitenBBM For Ios-1-0 User GuidetambunbungaiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Appointment Letter JobDokument30 SeitenAppointment Letter JobsalmanNoch keine Bewertungen
- 5.mpob - LeadershipDokument21 Seiten5.mpob - LeadershipChaitanya PillalaNoch keine Bewertungen
- MGMT 410 Book ReportDokument1 SeiteMGMT 410 Book ReportLester F BoernerNoch keine Bewertungen
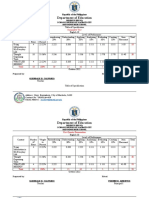
- Table of Specification ENGLISHDokument2 SeitenTable of Specification ENGLISHDonn Abel Aguilar IsturisNoch keine Bewertungen
- Clinic Management System (24 PGS)Dokument24 SeitenClinic Management System (24 PGS)pranithNoch keine Bewertungen
- Identifying Research ProblemsDokument29 SeitenIdentifying Research ProblemsEdel Borden PaclianNoch keine Bewertungen
- Pengenalan Icd-10 Struktur & IsiDokument16 SeitenPengenalan Icd-10 Struktur & IsirsudpwslampungNoch keine Bewertungen
- SMK ST GabrielDokument39 SeitenSMK ST Gabrielzanariah1911Noch keine Bewertungen
- 7 JitDokument36 Seiten7 JitFatima AsadNoch keine Bewertungen
- Group 7 Scope StatementDokument17 SeitenGroup 7 Scope Statementapi-335995226100% (4)
- ASTM C 136 Sieve Analysis of Fine and Coarse Aggregates (D)Dokument5 SeitenASTM C 136 Sieve Analysis of Fine and Coarse Aggregates (D)Yasir DharejoNoch keine Bewertungen
- Space Gass 12 5 Help Manual PDFDokument841 SeitenSpace Gass 12 5 Help Manual PDFNita NabanitaNoch keine Bewertungen
- DCinv V6 Rev2 CleanDokument38 SeitenDCinv V6 Rev2 Cleanyasirarafat91Noch keine Bewertungen
- Relay Testing Management SoftwareDokument10 SeitenRelay Testing Management Softwarechichid2008Noch keine Bewertungen
- Develop Your Kuji In Ability in Body and MindDokument7 SeitenDevelop Your Kuji In Ability in Body and MindLenjivac100% (3)
- Conclusion For A Research Paper About BullyingDokument7 SeitenConclusion For A Research Paper About Bullyingafnkjuvgzjzrgl100% (3)
- Windows Server 2016 Editions ComparisonDokument4 SeitenWindows Server 2016 Editions ComparisonmasterredhardNoch keine Bewertungen
- Jakobson Linguistics and PoeticsDokument8 SeitenJakobson Linguistics and PoeticsPhil KostovNoch keine Bewertungen
- 1 PDFDokument14 Seiten1 PDFPM JFNoch keine Bewertungen
- Consistency ModelsDokument42 SeitenConsistency ModelsPixel DinosaurNoch keine Bewertungen
- What Is Science Cornell Notes ExampleDokument3 SeitenWhat Is Science Cornell Notes Exampleapi-240096234Noch keine Bewertungen
- Omega Fluid PDFDokument2 SeitenOmega Fluid PDFapatzinfedNoch keine Bewertungen
- How To Prepare Squash Specimen Samples For Microscopic ObservationDokument3 SeitenHow To Prepare Squash Specimen Samples For Microscopic ObservationSAMMYNoch keine Bewertungen
- Balkan TribesDokument3 SeitenBalkan TribesCANELO_PIANONoch keine Bewertungen
- DPCA OHE Notice of Appeal 4-11-2018 FinalDokument22 SeitenDPCA OHE Notice of Appeal 4-11-2018 Finalbranax2000Noch keine Bewertungen
- Antiepilepticdg09gdg 121231093314 Phpapp01Dokument145 SeitenAntiepilepticdg09gdg 121231093314 Phpapp01Vaidya NurNoch keine Bewertungen
- Final Exam: Functional Performance Testing: Technical vs. Process CommissioningDokument9 SeitenFinal Exam: Functional Performance Testing: Technical vs. Process CommissioningBen MusimaneNoch keine Bewertungen
- Comparing Social Studies Lesson PlansDokument6 SeitenComparing Social Studies Lesson PlansArielle Grace Yalung100% (1)
- Rhythm Music and Education - Dalcroze PDFDokument409 SeitenRhythm Music and Education - Dalcroze PDFJhonatas Carmo100% (3)
- Receiving Welcoming and Greeting of GuestDokument18 SeitenReceiving Welcoming and Greeting of GuestMarwa KorkabNoch keine Bewertungen