Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Yale PD2, C85, D85Dokument28 SeitenYale PD2, C85, D85LGWILDCAT73Noch keine Bewertungen
- Ihs Kingdom Hot Keys ReferenceDokument1 SeiteIhs Kingdom Hot Keys ReferenceMuhammad Jahangir100% (1)
- College ManagementDokument58 SeitenCollege Managementforum502Noch keine Bewertungen
- Infobasic ProgrammingDokument10 SeitenInfobasic Programmingjaved73bdNoch keine Bewertungen
- Silhouette Training NotesDokument33 SeitenSilhouette Training NotesMichael Lester67% (3)
- Fastening SystemsDokument74 SeitenFastening SystemsskyvaneNoch keine Bewertungen
- Critical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaDokument6 SeitenCritical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaMedsystem atNoch keine Bewertungen
- A Cylindrical Shadow Eclipse Prediction Model For LEO Satellites With Application To IRS SatellitesDokument14 SeitenA Cylindrical Shadow Eclipse Prediction Model For LEO Satellites With Application To IRS SatellitesAsia Pacific Journal of Engineering Science and TechnologyNoch keine Bewertungen
- Operation Guide MSBDokument8 SeitenOperation Guide MSBMao RathanithNoch keine Bewertungen
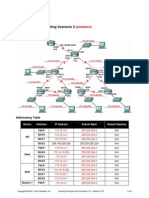
- 6 3 AnswersDokument4 Seiten6 3 Answersshiwaisanxian100% (1)
- SuperOrca ManualDokument22 SeitenSuperOrca Manualarm usaNoch keine Bewertungen
- MBD Asrock Imb150n ManualDokument39 SeitenMBD Asrock Imb150n ManualLaur IriNoch keine Bewertungen
- SS-7 May Refer To:: RFC 2719 RFC 2719Dokument15 SeitenSS-7 May Refer To:: RFC 2719 RFC 2719William GentryNoch keine Bewertungen
- Westfalia Cycle CarrierDokument20 SeitenWestfalia Cycle CarrierBarry John FitzGeradNoch keine Bewertungen
- Module 1: Introduction To Operating System: Need For An OSDokument18 SeitenModule 1: Introduction To Operating System: Need For An OSshikha2012Noch keine Bewertungen
- Caterpillar 990H BrochureDokument20 SeitenCaterpillar 990H BrochureEugene MalinowskiNoch keine Bewertungen
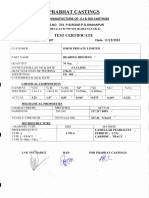
- Omfb MTC 11.12.23Dokument2 SeitenOmfb MTC 11.12.23obviousplatinum2Noch keine Bewertungen
- G4 ManualDokument64 SeitenG4 Manualfroggy12345678910100% (2)
- 2014 03 Istanbul PDFDokument3 Seiten2014 03 Istanbul PDFFaraj DividNoch keine Bewertungen
- Iso 6395 2008 en PDFDokument11 SeitenIso 6395 2008 en PDFjamesNoch keine Bewertungen
- Knowledge Based SystemsDokument57 SeitenKnowledge Based SystemsRodel MoralesNoch keine Bewertungen
- Seb 1242-Soil Mechanics II SuppDokument2 SeitenSeb 1242-Soil Mechanics II Suppcharler kinyuajNoch keine Bewertungen
- Modern PetrochemicalsDokument179 SeitenModern PetrochemicalsHani Kirmani100% (9)
- PC W130B 09 EUDokument272 SeitenPC W130B 09 EUОблачноNoch keine Bewertungen
- Ee BD ManualDokument37 SeitenEe BD Manualsergey62Noch keine Bewertungen
- A Review On Water ElectrolysisDokument18 SeitenA Review On Water ElectrolysisSilvester KolicNoch keine Bewertungen
- Extra - Exercises Unistall InformixDokument14 SeitenExtra - Exercises Unistall InformixМихаи БонцалоNoch keine Bewertungen
- Fundamentals of Rock MechanicsDokument4 SeitenFundamentals of Rock Mechanicsmaomao_vt890% (1)
- Scaffolding Price ListDokument7 SeitenScaffolding Price ListAl Patrick Dela CalzadaNoch keine Bewertungen
- Mathcad - 01 - Sump TankDokument10 SeitenMathcad - 01 - Sump Tankisrar khan0% (1)