Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Ube Conveying Fluid Including Slip Boundary Condition and Strain Inertial Gradient TheoryDokument13 SeitenUbe Conveying Fluid Including Slip Boundary Condition and Strain Inertial Gradient Theoryhmsedighi459Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Nonlocal Vibration and Instability Analysis of Embedded DWCNT PDFDokument16 SeitenNonlocal Vibration and Instability Analysis of Embedded DWCNT PDFhmsedighi459Noch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Accurate Electrostatic and Van Der Waals PullinDokument35 SeitenAccurate Electrostatic and Van Der Waals Pullinhmsedighi459Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Application of Elastically Supported Single-Walled Carbon Nanotubes For Sensing Arbitrarily Attached Nano-ObjectsDokument10 SeitenApplication of Elastically Supported Single-Walled Carbon Nanotubes For Sensing Arbitrarily Attached Nano-Objectshmsedighi459Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Vibration of Nonlocal Kelvin-Voigt Viscoelastic DampedDokument13 SeitenVibration of Nonlocal Kelvin-Voigt Viscoelastic Dampedhmsedighi459Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Wave Propagation in Fluid-Filled Single-Walled Carbon PDFDokument13 SeitenWave Propagation in Fluid-Filled Single-Walled Carbon PDFhmsedighi459Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Design and Simulation of A Carbon Nanotube-Based Adjustable Nano-Electromechanical Shock SwitchDokument11 SeitenDesign and Simulation of A Carbon Nanotube-Based Adjustable Nano-Electromechanical Shock Switchhmsedighi459Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Analysis and Modeling The Size Effect On Vibration of Functionally Graded Nanobeams Based On Nonlocal Timoshenko Beam TheoryDokument16 SeitenAnalysis and Modeling The Size Effect On Vibration of Functionally Graded Nanobeams Based On Nonlocal Timoshenko Beam Theoryhmsedighi459Noch keine Bewertungen
- Final Published 1002 JACMDokument9 SeitenFinal Published 1002 JACMhmsedighi459Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Final Published 1001 JACMDokument9 SeitenFinal Published 1001 JACMhmsedighi459Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Modeling The Size Dependent Pull-In Instability of Beam-Type NEMS Using Strain Gradient TheoryDokument24 SeitenModeling The Size Dependent Pull-In Instability of Beam-Type NEMS Using Strain Gradient Theoryhmsedighi459Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Crack Detection and Vibration Behavior of Cracked Beams: P.N. Saavedra, L.A. Cuiti NoDokument9 SeitenCrack Detection and Vibration Behavior of Cracked Beams: P.N. Saavedra, L.A. Cuiti Nohmsedighi459Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Mix Design PosterDokument1 SeiteMix Design PosterAbhilash KumarNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- OpenFoam of AppsDokument20 SeitenOpenFoam of AppsM AliNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Weapon Lights and Targeting LasersDokument3 SeitenWeapon Lights and Targeting LasersバラモスまさゆきNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Essentials of Directional Protection and SelectivityDokument27 SeitenThe Essentials of Directional Protection and SelectivityMarcus Figueroa100% (1)
- Dyatlov Interview 1995 enDokument6 SeitenDyatlov Interview 1995 enmhulot100% (1)
- HGU User ManualDokument72 SeitenHGU User Manuallomayani100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Myanmar Power SystemDokument4 SeitenMyanmar Power Systemkayden.keitonNoch keine Bewertungen
- Test Procedure and MethodDokument1 SeiteTest Procedure and MethodkmiqdNoch keine Bewertungen
- Family Surveyed 2017 - TimberDokument26 SeitenFamily Surveyed 2017 - TimberAlibasher Macalnas0% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Rcfe Contract SSHDokument240 SeitenRcfe Contract SSHJeanne MarshNoch keine Bewertungen
- The Role of Social Media and Its Implication On Economic Growth On Society in IndiaDokument3 SeitenThe Role of Social Media and Its Implication On Economic Growth On Society in IndiaSara EmamiNoch keine Bewertungen
- Database Upgrade 10g To 11gDokument28 SeitenDatabase Upgrade 10g To 11gSubhasis1928Noch keine Bewertungen
- IET Membership Guidance NotesDokument4 SeitenIET Membership Guidance NotesKingsley InbasinghNoch keine Bewertungen
- Characteristics of Supercritical Flow in Rectangular ChannelDokument10 SeitenCharacteristics of Supercritical Flow in Rectangular ChannelFatihNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- V1 001 PDFDokument20 SeitenV1 001 PDFG100% (2)
- 00 EET3196 Lecture - Tutorial Ouline Plan1Dokument6 Seiten00 EET3196 Lecture - Tutorial Ouline Plan1mikeNoch keine Bewertungen
- NO Measurement by Griess MethodDokument9 SeitenNO Measurement by Griess MethodhardianNoch keine Bewertungen
- Dr. Ambedkar Institute of Technology: Mandatory Non-Credit NSS Course (22NSN310) Bachelor of Engineering inDokument4 SeitenDr. Ambedkar Institute of Technology: Mandatory Non-Credit NSS Course (22NSN310) Bachelor of Engineering inshamalac2004Noch keine Bewertungen
- Functions SolutionDokument10 SeitenFunctions SolutionOwais Afzal JanNoch keine Bewertungen
- DD The Superior College Lahore: Bscs 5CDokument15 SeitenDD The Superior College Lahore: Bscs 5CLukeNoch keine Bewertungen
- Durability of Culvert PipeDokument21 SeitenDurability of Culvert PipeIftiNoch keine Bewertungen
- Business Plan RubricsDokument4 SeitenBusiness Plan RubricsFranz MenesisNoch keine Bewertungen
- 01 SQL ErrorsDokument2.085 Seiten01 SQL ErrorsM. temNoch keine Bewertungen
- Coomaraswamy, SarpabandhaDokument3 SeitenCoomaraswamy, SarpabandhakamakarmaNoch keine Bewertungen
- Lab 7Dokument12 SeitenLab 7api-25252422380% (5)
- DominosDokument11 SeitenDominosApril MartinezNoch keine Bewertungen
- SKANDIX - Order EditDokument2 SeitenSKANDIX - Order EditmehNoch keine Bewertungen
- Generic Roadmap For The Counties of Kenya V1.1Dokument33 SeitenGeneric Roadmap For The Counties of Kenya V1.1ICT AUTHORITYNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
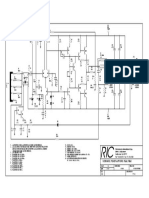
- Ric RG90 y RG60Dokument1 SeiteRic RG90 y RG60GabrielConsentidoNoch keine Bewertungen
- Estimation and Costing by M Chakraborty PDFDokument4 SeitenEstimation and Costing by M Chakraborty PDFAakash Kamthane0% (3)