Das könnte Ihnen auch gefallen
- Evolución Del Mantenimiento Industrial y Etapas A Lo Largo de Su HistoriaDokument3 SeitenEvolución Del Mantenimiento Industrial y Etapas A Lo Largo de Su HistoriaJosue Alejandro HernándezNoch keine Bewertungen
- Fluidos CompresiblesDokument19 SeitenFluidos CompresiblesJosue Alejandro Hernández0% (1)
- Usb Con Pic18f4550 y Labview - Rev 2012Dokument18 SeitenUsb Con Pic18f4550 y Labview - Rev 2012Maicol Javier D M80% (5)
- Trabajo en FrioDokument10 SeitenTrabajo en FrioJosue Alejandro HernándezNoch keine Bewertungen
- Caracteristicas-Aire-Acondicionado-Oswaldo SorianoDokument3 SeitenCaracteristicas-Aire-Acondicionado-Oswaldo SorianoJoshua TlapancoNoch keine Bewertungen
- KRIGINGDokument10 SeitenKRIGINGJean ValjeanNoch keine Bewertungen
- Informe Técnico (Rueda Dentada Seridme)Dokument7 SeitenInforme Técnico (Rueda Dentada Seridme)Aura Milena Casseres RodriguezNoch keine Bewertungen
- Clase 3Dokument116 SeitenClase 3Juan Carlos Bobadilla RodriguezNoch keine Bewertungen
- Resumen Mecanismo Físico de EbulliciónDokument2 SeitenResumen Mecanismo Físico de EbulliciónWilTolosaNoch keine Bewertungen
- Compresor MatteyDokument10 SeitenCompresor MatteymvladimirNoch keine Bewertungen
- Evolución Del Modelo AtómicoDokument1 SeiteEvolución Del Modelo AtómicoDaniel GomezNoch keine Bewertungen
- I. Introduccion. Geoquim, Estruc, PargenDokument26 SeitenI. Introduccion. Geoquim, Estruc, PargenHugo García InostrozaNoch keine Bewertungen
- Ejemplo G68Dokument4 SeitenEjemplo G68Abinadab Ahumada RuelasNoch keine Bewertungen
- NT935 Ed16 R1.7 EsDokument30 SeitenNT935 Ed16 R1.7 EsAbraham TorresNoch keine Bewertungen
- Tippens - Dinamica de Cuerpo RigidoDokument33 SeitenTippens - Dinamica de Cuerpo Rigidojaimecolonche100% (1)
- Brochure EsavDoc DigitalDokument8 SeitenBrochure EsavDoc DigitalCarlos ArceNoch keine Bewertungen
- Reducción Mta Al HG Nitrometano IlustradaDokument13 SeitenReducción Mta Al HG Nitrometano IlustradaJorge Alberto Estrada TorresNoch keine Bewertungen
- Cronograma de ActividadesDokument6 SeitenCronograma de ActividadesKarime CTNoch keine Bewertungen
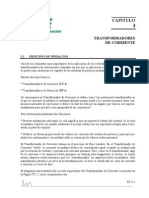
- TC'sDokument14 SeitenTC'sRamiro Padilla Trujillo100% (1)
- Guia Trazabilidad RastreabilidadDokument21 SeitenGuia Trazabilidad RastreabilidadLeonardo Correal0% (1)
- Clase 22 - Medidores de Tierra Puesta A TierraDokument31 SeitenClase 22 - Medidores de Tierra Puesta A Tierrajavier lipaNoch keine Bewertungen
- Dulce de TamarindoDokument3 SeitenDulce de TamarindoMariela Angeles RodriguezNoch keine Bewertungen
- Sistema Anti FOULINGDokument12 SeitenSistema Anti FOULINGAB Francisco JuanNoch keine Bewertungen
- Constancia de No AdeudoDokument1 SeiteConstancia de No AdeudoVanessa GuzmanNoch keine Bewertungen
- Analisis Cerchas 3DDokument5 SeitenAnalisis Cerchas 3DJorge Mariio DiiAzNoch keine Bewertungen
- Lagg 1M PDFDokument2 SeitenLagg 1M PDFlimbert_Noch keine Bewertungen
- Rugosidad FinalDokument42 SeitenRugosidad FinalJohnPérezNoch keine Bewertungen
- Mapa ConceptualDokument3 SeitenMapa ConceptuallizethOrtegaNoch keine Bewertungen
- Acido 35 DinitrosaliclicoDokument5 SeitenAcido 35 DinitrosaliclicoImanol Cuevas MedinaNoch keine Bewertungen
- Método Matricial de La RigidezDokument9 SeitenMétodo Matricial de La RigidezjhonmoyatNoch keine Bewertungen
- CARGADORDokument25 SeitenCARGADORHeart Sandler SandlerNoch keine Bewertungen
- Articulo LlantasDokument10 SeitenArticulo LlantasAndres Felipe Pinilla LeonNoch keine Bewertungen
- Clasificacion Del Equipo para Manejo deDokument5 SeitenClasificacion Del Equipo para Manejo deVictorNoch keine Bewertungen
- Sentor de Temperatura Resistencia Pt100Dokument6 SeitenSentor de Temperatura Resistencia Pt100xato_xatin_21Noch keine Bewertungen
- Psicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaVon EverandPsicología oscura: Una guía esencial de persuasión, manipulación, engaño, control mental, negociación, conducta humana, PNL y guerra psicológicaBewertung: 4.5 von 5 Sternen4.5/5 (766)
- Yo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Von EverandYo Pude, ¡Tú Puedes!: Cómo tomar el control de tu bienestar emocional y convertirte en una persona imparable (edición revisada y expandida)Bewertung: 5 von 5 Sternen5/5 (9)
- Recupera tu mente, reconquista tu vidaVon EverandRecupera tu mente, reconquista tu vidaBewertung: 5 von 5 Sternen5/5 (9)
- La violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaVon EverandLa violencia invisible: Identificar, entender y superar la violencia psicológica que sufrimos (y ejercemos) en nuestra vida cotidianaBewertung: 4 von 5 Sternen4/5 (2)
- La madre emocionalmente ausente: Como reconocer y sanar los efectos invisibles del abandono emocional infantilVon EverandLa madre emocionalmente ausente: Como reconocer y sanar los efectos invisibles del abandono emocional infantilNoch keine Bewertungen
- Resetea tu mente. Descubre de lo que eres capazVon EverandResetea tu mente. Descubre de lo que eres capazBewertung: 5 von 5 Sternen5/5 (196)
- El poder del optimismo: Herramientas para vivir de forma más positivaVon EverandEl poder del optimismo: Herramientas para vivir de forma más positivaBewertung: 5 von 5 Sternen5/5 (16)
- Las 6 necesidades de cada niño: Empoderar a padres e hijos a través de la ciencia de la conexiónVon EverandLas 6 necesidades de cada niño: Empoderar a padres e hijos a través de la ciencia de la conexiónBewertung: 4.5 von 5 Sternen4.5/5 (6)
- Resumen de Pensar rápido pensar despacio de Daniel KahnemanVon EverandResumen de Pensar rápido pensar despacio de Daniel KahnemanBewertung: 4.5 von 5 Sternen4.5/5 (64)
- Una mente en calma: Técnicas para manejar los pensamientos intrusivosVon EverandUna mente en calma: Técnicas para manejar los pensamientos intrusivosBewertung: 4.5 von 5 Sternen4.5/5 (143)
- Contra la ansiedad: Una guía completa para manejar emociones difícilesVon EverandContra la ansiedad: Una guía completa para manejar emociones difícilesBewertung: 5 von 5 Sternen5/5 (58)
- Cómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaVon EverandCómo terminar lo que empiezas: El arte de perseverar, pasar a la acción, ejecutar los planes y tener disciplinaBewertung: 4.5 von 5 Sternen4.5/5 (6)
- Influencia. La psicología de la persuasiónVon EverandInfluencia. La psicología de la persuasiónBewertung: 4.5 von 5 Sternen4.5/5 (14)