Das könnte Ihnen auch gefallen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sae J3213-2023Dokument32 SeitenSae J3213-20237620383tlNoch keine Bewertungen
- 2.1 System Requirement SpecificationDokument30 Seiten2.1 System Requirement SpecificationAtif NiazNoch keine Bewertungen
- Primary CellDokument4 SeitenPrimary CellganeshpreetamNoch keine Bewertungen
- 18 - Sikafloor - 264 - SGDokument6 Seiten18 - Sikafloor - 264 - SGPaul ManiquisNoch keine Bewertungen
- Applications of ChromatographyDokument11 SeitenApplications of ChromatographyKallool91Noch keine Bewertungen
- Water ShowDokument9 SeitenWater ShowFaizal SattuNoch keine Bewertungen
- Iraudamp3 - 120W X 6 Channel Class D Audio Power Amplifier Using IRS20124S and IRF6645Dokument40 SeitenIraudamp3 - 120W X 6 Channel Class D Audio Power Amplifier Using IRS20124S and IRF6645Anonymous R0s4q9X8Noch keine Bewertungen
- Comparative Thermal Analysis of Fin of I.C. Engine With Extensions IJERTV6IS040377 PDFDokument8 SeitenComparative Thermal Analysis of Fin of I.C. Engine With Extensions IJERTV6IS040377 PDFAhmad FaizalNoch keine Bewertungen
- Barrett Firearms - MRAD - Operators-Manual-18697 18052Dokument23 SeitenBarrett Firearms - MRAD - Operators-Manual-18697 18052Ricardo C TorresNoch keine Bewertungen
- Modern System Analysis and DesignDokument40 SeitenModern System Analysis and DesignJed DíazNoch keine Bewertungen
- H-DC-0023 (AP) Economy Manual Dishwashing LiquidDokument1 SeiteH-DC-0023 (AP) Economy Manual Dishwashing LiquidShiraz Khan83% (6)
- GR00005300 36Dokument22 SeitenGR00005300 36Luis David Leon GarciaNoch keine Bewertungen
- Soalan Fizik Chapter 9Dokument10 SeitenSoalan Fizik Chapter 9Yusfalina Mohd YusoffNoch keine Bewertungen
- 21 UK Catalogo Primaled GBDokument12 Seiten21 UK Catalogo Primaled GBluc1902Noch keine Bewertungen
- Rube GoldbergDokument20 SeitenRube Goldbergapi-297309213Noch keine Bewertungen
- Review of Plant Leaf Disease Detection Using Image ProcessingDokument5 SeitenReview of Plant Leaf Disease Detection Using Image ProcessingInternational Journal of Application or Innovation in Engineering & Management100% (1)
- Pirith PothaDokument3 SeitenPirith PothaAmila Viraj Gunarathna100% (2)
- 2016-04 DIAMETER ArchitectureDokument22 Seiten2016-04 DIAMETER ArchitectureVivek ShahNoch keine Bewertungen
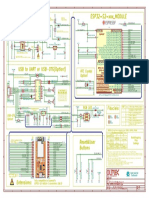
- ESP32 S2 DevKit Lipo - Rev - B1Dokument1 SeiteESP32 S2 DevKit Lipo - Rev - B1Inventor TestNoch keine Bewertungen
- Sets of Rule For Fuzzy Logic Control of Washing MachineDokument1 SeiteSets of Rule For Fuzzy Logic Control of Washing MachineKHAIRUNISANoch keine Bewertungen
- History: Aviation Is The Practical Aspect or Art ofDokument3 SeitenHistory: Aviation Is The Practical Aspect or Art ofEarle J ZaficoNoch keine Bewertungen
- Design of Cold Formed Sections by Satish KumarDokument62 SeitenDesign of Cold Formed Sections by Satish Kumarspawar1988Noch keine Bewertungen
- 6.chain Pulley BlockDokument2 Seiten6.chain Pulley BlockFrancis Vinoj75% (4)
- SiemensDokument254 SeitenSiemensRogelio ValdezNoch keine Bewertungen
- Cobra Training ManualDokument6 SeitenCobra Training ManualJovani Gonzalez BecerraNoch keine Bewertungen
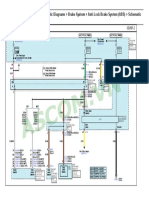
- 2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsDokument1 Seite2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsHuy Trần QuốcNoch keine Bewertungen
- Giaonx, Bai 24 - P27-28.5. Vinh-Dat Vuong-Revised-1Dokument9 SeitenGiaonx, Bai 24 - P27-28.5. Vinh-Dat Vuong-Revised-1Phước Trương VĩnhNoch keine Bewertungen
- 13bentonit SlurryDokument24 Seiten13bentonit SlurrykesharinareshNoch keine Bewertungen
- Brosur SikaDokument7 SeitenBrosur SikachaerulNoch keine Bewertungen
- Bisley-Phosphonate-Dispersant-Plasticizer-TDS (1) پخش کننده و روان کننده فسفونات بیسلیDokument2 SeitenBisley-Phosphonate-Dispersant-Plasticizer-TDS (1) پخش کننده و روان کننده فسفونات بیسلیrezaNoch keine Bewertungen