Das könnte Ihnen auch gefallen
- STM Paper PDFDokument73 SeitenSTM Paper PDFAlrack sinner75% (4)
- DiodeDokument22 SeitenDiodeSaurabh Mittal100% (1)
- Design of The Deployment Mechanism of Solar Array PDFDokument8 SeitenDesign of The Deployment Mechanism of Solar Array PDFShoaib IqbalNoch keine Bewertungen
- M Jayakumar Paper (17142691331)Dokument12 SeitenM Jayakumar Paper (17142691331)N V DhandapaniNoch keine Bewertungen
- Development of A Lightweight Tubular Space FrameDokument7 SeitenDevelopment of A Lightweight Tubular Space FrameJony M. TemnikarNoch keine Bewertungen
- Analysis and Validation of Eicher 11.10 ChassisDokument4 SeitenAnalysis and Validation of Eicher 11.10 ChassisdessaivipulNoch keine Bewertungen
- An Optimization Analysis On An Automotive Component With Fatigue Constraint Using Hyperworks Software For Environmental SustainabilityDokument5 SeitenAn Optimization Analysis On An Automotive Component With Fatigue Constraint Using Hyperworks Software For Environmental SustainabilitySahaya GrinspanNoch keine Bewertungen
- Functional Simulation of Harmonic Drive With S.M.A. Wave GeneratorDokument5 SeitenFunctional Simulation of Harmonic Drive With S.M.A. Wave GeneratorBizau ViorelNoch keine Bewertungen
- About The Preliminary Design of The Suspension SPRDokument7 SeitenAbout The Preliminary Design of The Suspension SPRalinNoch keine Bewertungen
- Fatigue Life Estimation of Chassis Frame FESMDokument7 SeitenFatigue Life Estimation of Chassis Frame FESMRtdpDinuNoch keine Bewertungen
- Static Analysis of Spur Gear Using FEMDokument6 SeitenStatic Analysis of Spur Gear Using FEMSameOldHatNoch keine Bewertungen
- Assessment of Dynamic Parameters of Heavy-Duty GearsDokument6 SeitenAssessment of Dynamic Parameters of Heavy-Duty GearsMohammad HosseiniNoch keine Bewertungen
- Design and Clamping Force Analysis of Vacuum Fixture To Machine Aerospace ComponentsDokument6 SeitenDesign and Clamping Force Analysis of Vacuum Fixture To Machine Aerospace ComponentssaaNoch keine Bewertungen
- Analysis of Fatigue Characteristics of Gears Based On Ncode DesignlifeDokument6 SeitenAnalysis of Fatigue Characteristics of Gears Based On Ncode DesignlifeTUTUNoch keine Bewertungen
- Stress and displacement analysis of axial flow impulse turbine rotor bladeDokument8 SeitenStress and displacement analysis of axial flow impulse turbine rotor bladecena3135Noch keine Bewertungen
- Optimization of Engine Mounting Bracket Using FEA Mr. Pramod Walunje Prof. V.K. KurkuteDokument4 SeitenOptimization of Engine Mounting Bracket Using FEA Mr. Pramod Walunje Prof. V.K. KurkuteFabian CaizaNoch keine Bewertungen
- Design Sensitivity Analysis of Air-Lubricated Slider BearingsDokument3 SeitenDesign Sensitivity Analysis of Air-Lubricated Slider BearingsDeepak SharmaNoch keine Bewertungen
- Fatigue Life of A Mining Dump Truck...Dokument9 SeitenFatigue Life of A Mining Dump Truck...Esteban FaundezNoch keine Bewertungen
- Comparative Analysis of Vehicle Suspension System in Matlab-Simulink and Msc-Adams With The Help of Quarter Car ModelDokument8 SeitenComparative Analysis of Vehicle Suspension System in Matlab-Simulink and Msc-Adams With The Help of Quarter Car ModelHemanth KrishnaNoch keine Bewertungen
- Thesis On Fretting Fatigue in Railway AxlesDokument6 SeitenThesis On Fretting Fatigue in Railway Axlespamelasmithlittlerock100% (2)
- 05 Ijetmr19 A01 612 PDFDokument8 Seiten05 Ijetmr19 A01 612 PDFShahnewaz BhuiyanNoch keine Bewertungen
- Deformation Analysis of a 3-Axis Gantry System Using FEADokument4 SeitenDeformation Analysis of a 3-Axis Gantry System Using FEAŽan PjerNoch keine Bewertungen
- Abaqus Fem Analysis of The Postbuckling Behaviour of Composite PDF E1094Dokument4 SeitenAbaqus Fem Analysis of The Postbuckling Behaviour of Composite PDF E1094FabricioNoch keine Bewertungen
- Integrated Landing Gear System PDFDokument14 SeitenIntegrated Landing Gear System PDFMario Di PisaNoch keine Bewertungen
- 3-D Modelling AND Finite Element Analysis OF EOT Crane: Abhinay Suratkar, Vishal ShuklaDokument4 Seiten3-D Modelling AND Finite Element Analysis OF EOT Crane: Abhinay Suratkar, Vishal ShuklaNaresh DesaiNoch keine Bewertungen
- Weight Reduction of Planetary Gearbox Pedestal Using Finite Element AnalysisDokument4 SeitenWeight Reduction of Planetary Gearbox Pedestal Using Finite Element AnalysisPrabhakar PurushothamanNoch keine Bewertungen
- Point MobilityDokument10 SeitenPoint MobilityPadma JaNoch keine Bewertungen
- Me161011 Lab 4Dokument11 SeitenMe161011 Lab 4Muhammad HamzaNoch keine Bewertungen
- Fatigue Life Prediction For Automobile Coil Spring Using Modal AnalysisDokument6 SeitenFatigue Life Prediction For Automobile Coil Spring Using Modal Analysisvivashwanth paiNoch keine Bewertungen
- SM3357Dokument13 SeitenSM3357Glorius CarmenNoch keine Bewertungen
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDokument14 Seiten5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNoch keine Bewertungen
- Analysis of Flywheel: Akshay P. Punde, G.K.GattaniDokument3 SeitenAnalysis of Flywheel: Akshay P. Punde, G.K.GattaniKelsey RyanNoch keine Bewertungen
- Modeling of The Suspension of A Passenger Bus by Finite Element SoftwareDokument3 SeitenModeling of The Suspension of A Passenger Bus by Finite Element SoftwarePrasad KhatiNoch keine Bewertungen
- Matecconf Eureca2020 03001Dokument13 SeitenMatecconf Eureca2020 03001Putra JokoNoch keine Bewertungen
- Finite Element Analysis of Cylinder Piston Impact Based On ANSYS/LS-DYNADokument4 SeitenFinite Element Analysis of Cylinder Piston Impact Based On ANSYS/LS-DYNAAshutosh KumarNoch keine Bewertungen
- Stress Behaviour Improvement of Automobile Flywheel Under High Centrifugal ForcesDokument6 SeitenStress Behaviour Improvement of Automobile Flywheel Under High Centrifugal ForcesParag NaikNoch keine Bewertungen
- System Simulation of Belt ConveyorsDokument9 SeitenSystem Simulation of Belt Conveyorsharishkumar.ravichandranNoch keine Bewertungen
- Mathematical Modelling and Shape Optimisation of Front Damper Mount of Ashok Leyland 1612 Truck Using 3d Finite Element MethodDokument7 SeitenMathematical Modelling and Shape Optimisation of Front Damper Mount of Ashok Leyland 1612 Truck Using 3d Finite Element MethodtheijesNoch keine Bewertungen
- Static Analysis, Design Modification and Modal Analysis of Structural Chassis FrameDokument5 SeitenStatic Analysis, Design Modification and Modal Analysis of Structural Chassis FrameGopinath ChakrabortyNoch keine Bewertungen
- Ansys Analysis-Trolley Beam 3T1Dokument13 SeitenAnsys Analysis-Trolley Beam 3T1Ye Wint ThuNoch keine Bewertungen
- Journal-Analysis of Semi Circular-Arch Truses Using I-DeasDokument7 SeitenJournal-Analysis of Semi Circular-Arch Truses Using I-DeascurrjekNoch keine Bewertungen
- Design and Analysis of Twin Motor Planetary Gear Drive For Dual Speed and Safety Optimization in Hoist ApplicationDokument5 SeitenDesign and Analysis of Twin Motor Planetary Gear Drive For Dual Speed and Safety Optimization in Hoist ApplicationIJIRSTNoch keine Bewertungen
- Landing GearDokument12 SeitenLanding GearcmpmarinhoNoch keine Bewertungen
- Design and Analysis of Steering Knuckle 2019 PDFDokument9 SeitenDesign and Analysis of Steering Knuckle 2019 PDFsanjeev105Noch keine Bewertungen
- 5.accidental Car Impact Analysis and CFDDokument6 Seiten5.accidental Car Impact Analysis and CFDprojectzfourNoch keine Bewertungen
- Rotordynamic Design Optimization of A Steam Turbine Rotor Bearing SystemDokument72 SeitenRotordynamic Design Optimization of A Steam Turbine Rotor Bearing SystemTarkan KaragozNoch keine Bewertungen
- Optimization of Car Rim Using OptiStructDokument6 SeitenOptimization of Car Rim Using OptiStructsujaydsouza1987Noch keine Bewertungen
- Stress Distribution Analysis of Rear Axle Housing by Using Finite Elements AnalysisDokument10 SeitenStress Distribution Analysis of Rear Axle Housing by Using Finite Elements AnalysisrubantoNoch keine Bewertungen
- Analysis of Fly WheelDokument5 SeitenAnalysis of Fly Wheelfsilassie8012Noch keine Bewertungen
- Midas Civil - Analysis ReferenceDokument400 SeitenMidas Civil - Analysis ReferenceMohd FaizalNoch keine Bewertungen
- Fatigue Life of AA7075Dokument10 SeitenFatigue Life of AA7075Murali SiddarthNoch keine Bewertungen
- OSA Poster Design Improvement SigmaConsultancyDokument6 SeitenOSA Poster Design Improvement SigmaConsultancySanchit GuptaNoch keine Bewertungen
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDokument5 SeitenUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNoch keine Bewertungen
- Design, Analysis and Simulation of A Composite BulkheadDokument5 SeitenDesign, Analysis and Simulation of A Composite BulkheadThota Sri K HarithaNoch keine Bewertungen
- 8 Kamaland RahmanDokument11 Seiten8 Kamaland RahmanBinh NghiemNoch keine Bewertungen
- Dynamic Damage and FragmentationVon EverandDynamic Damage and FragmentationDavid Edward LambertNoch keine Bewertungen
- Coupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsVon EverandCoupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsNoch keine Bewertungen
- Luran S KR2868C: Acrylonitrile Styrene Acrylate / Polycarbonate (ASA/PC)Dokument3 SeitenLuran S KR2868C: Acrylonitrile Styrene Acrylate / Polycarbonate (ASA/PC)rosebifNoch keine Bewertungen
- Government Engineering College Surveying Lab ManualDokument26 SeitenGovernment Engineering College Surveying Lab ManualNittin BhagatNoch keine Bewertungen
- Sallyport MBI Bifold BrochureDokument6 SeitenSallyport MBI Bifold BrochureameraldaherNoch keine Bewertungen
- Excellent Hex Key Wrench: English VersionDokument54 SeitenExcellent Hex Key Wrench: English Versionmg pyaeNoch keine Bewertungen
- Lab Sheet - Infiltration TestDokument8 SeitenLab Sheet - Infiltration TestDINAMARIANASAMUJI0% (1)
- Zener DataDokument2 SeitenZener Dataapi-27149887Noch keine Bewertungen
- Asme B36.10M-2018Dokument36 SeitenAsme B36.10M-2018امينNoch keine Bewertungen
- 1855OME - Instruction Manual - Kinney Oil Mist EliminatorsDokument15 Seiten1855OME - Instruction Manual - Kinney Oil Mist EliminatorsahmedNoch keine Bewertungen
- TDS2000 Rig Systems DiagramsDokument13 SeitenTDS2000 Rig Systems DiagramsBaskar KannaiahNoch keine Bewertungen
- IEC CsODESDokument2 SeitenIEC CsODESArun KumarNoch keine Bewertungen
- Experion Scada PinDokument7 SeitenExperion Scada PinKhalid AliNoch keine Bewertungen
- Catalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Dokument30 SeitenCatalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Jean MarzanNoch keine Bewertungen
- Suvarnabhumi Airport Trial OperationDokument4 SeitenSuvarnabhumi Airport Trial Operationfwmching0% (1)
- Lab5 AnswerSheetDokument3 SeitenLab5 AnswerSheetnislam57Noch keine Bewertungen
- Switching Theory and Logic Design PDFDokument159 SeitenSwitching Theory and Logic Design PDFSai TejaswiniNoch keine Bewertungen
- Huawei EHuawei - Erelay - Solution - OverviewRelay Solution OverviewDokument31 SeitenHuawei EHuawei - Erelay - Solution - OverviewRelay Solution Overviewtariq8283% (6)
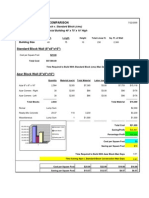
- AZAR Block CostcomparisonDokument8 SeitenAZAR Block CostcomparisontckittuNoch keine Bewertungen
- Assessment Clo1 Clo2 Clo3 Clo4 Clo5 Plo1 Plo2 Plo2 Plo1Dokument12 SeitenAssessment Clo1 Clo2 Clo3 Clo4 Clo5 Plo1 Plo2 Plo2 Plo1Ma Liu Hun VuiNoch keine Bewertungen
- Setting vpn1Dokument10 SeitenSetting vpn1Unink AanNoch keine Bewertungen
- 03.job Specification Instrumentaton PDFDokument27 Seiten03.job Specification Instrumentaton PDFshareyhouNoch keine Bewertungen
- XHLE Long Coupled Centrifugal Pump EnglishDokument8 SeitenXHLE Long Coupled Centrifugal Pump Englishgagi1994brahimNoch keine Bewertungen
- Saint Gobain - CertainTeed Roofing ShinglesDokument14 SeitenSaint Gobain - CertainTeed Roofing ShinglesJagriti KashyapNoch keine Bewertungen
- PVT Correlations McCain - ValkoDokument17 SeitenPVT Correlations McCain - ValkoAlejandra Maleja RivasNoch keine Bewertungen
- 2014 Solder Joint ReliabilityDokument18 Seiten2014 Solder Joint ReliabilitychoprahariNoch keine Bewertungen
- 01-01 Boltec S - SafetyDokument30 Seiten01-01 Boltec S - SafetyALVARO ANTONIO SILVA DELGADONoch keine Bewertungen
- Design of A Fluidized Drum GranulatorDokument6 SeitenDesign of A Fluidized Drum GranulatorditchcheNoch keine Bewertungen
- Online Institute Reporting Slip of The Application Number - 200310422837 PDFDokument1 SeiteOnline Institute Reporting Slip of The Application Number - 200310422837 PDFRohith RohanNoch keine Bewertungen
- RCC BEAM DESIGN AND SERVICEABILITYDokument15 SeitenRCC BEAM DESIGN AND SERVICEABILITYprashmceNoch keine Bewertungen
- Grounding and JumperingDokument16 SeitenGrounding and Jumperingferreiramarco56Noch keine Bewertungen