Das könnte Ihnen auch gefallen
- Solucion Logica Cableada 2Dokument13 SeitenSolucion Logica Cableada 2AlexNorbertoUrbanoBolañosNoch keine Bewertungen
- Practica PLCDokument12 SeitenPractica PLC62872Noch keine Bewertungen
- Automatismos Basicos 2016 - 8Dokument18 SeitenAutomatismos Basicos 2016 - 8franco jorqueraNoch keine Bewertungen
- Trabajos Ejercicios Automatas - 15-1-2013Dokument8 SeitenTrabajos Ejercicios Automatas - 15-1-2013Edgar HernandezNoch keine Bewertungen
- MOSFETDokument21 SeitenMOSFETleonardo100% (1)
- Reporte Proyecto Final Automatizacion de TolvasDokument10 SeitenReporte Proyecto Final Automatizacion de TolvasAlejandro GuerreroNoch keine Bewertungen
- Examen de PLC Unidad 1 RelevaciónDokument2 SeitenExamen de PLC Unidad 1 RelevaciónAngel NgNoch keine Bewertungen
- Reporte de Examen VII - Inversor de Giro de Un Motor TrifásicoDokument30 SeitenReporte de Examen VII - Inversor de Giro de Un Motor TrifásicoOscar Manuel Quiroz De La Vega50% (2)
- Control IndustrialDokument54 SeitenControl IndustrialAndrés Dìaz100% (1)
- Manual de Neumatica Del 2005Dokument76 SeitenManual de Neumatica Del 2005keyomallNoch keine Bewertungen
- Practica 3 Motor Monofasico BienDokument3 SeitenPractica 3 Motor Monofasico BienXavier UyaguariNoch keine Bewertungen
- TM - Funciones Auxiliares de Automatismo - Cursos - Zelio Logic - Manual Zelio C6 ZelioSoft Bloques de F PDFDokument13 SeitenTM - Funciones Auxiliares de Automatismo - Cursos - Zelio Logic - Manual Zelio C6 ZelioSoft Bloques de F PDFArturo FuentesNoch keine Bewertungen
- Manual de Prácticas Labview - López Jiménez VioletaDokument30 SeitenManual de Prácticas Labview - López Jiménez Violetavioleta_jiménez_2Noch keine Bewertungen
- Tiristores SCR TRIACDokument44 SeitenTiristores SCR TRIACHilda Angelica Curitomay Quispe100% (1)
- Sistemas Automaticos 2 - Balotario Examen SustitutorioDokument9 SeitenSistemas Automaticos 2 - Balotario Examen Sustitutorioacajahuaringa100% (1)
- Capitulo 1 Introduccion A ControlDokument12 SeitenCapitulo 1 Introduccion A ControlRodolfo Carrillo ArenasNoch keine Bewertungen
- Trabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoDokument46 SeitenTrabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoWalter Jesus100% (1)
- 5 B Programacion de PLC 1Dokument25 Seiten5 B Programacion de PLC 1Chamo Pobre BatracioNoch keine Bewertungen
- PLC 1Dokument48 SeitenPLC 1Manuel Rivas100% (1)
- Practica Con Pulsadores y Contactores 33Dokument5 SeitenPractica Con Pulsadores y Contactores 33José Luis Vásquez SilvaNoch keine Bewertungen
- Cuaderno de Trabajo 01 - Webinar Week 2022Dokument11 SeitenCuaderno de Trabajo 01 - Webinar Week 2022Bryan MartinezNoch keine Bewertungen
- Guia TallerDokument122 SeitenGuia TallerJason Fernández GarciaNoch keine Bewertungen
- 10 Selección de PIADokument2 Seiten10 Selección de PIACarlos Gleen FerreiroNoch keine Bewertungen
- Electron Eu Matic ADokument104 SeitenElectron Eu Matic AROXANA ROJAS ALVAREZNoch keine Bewertungen
- 2210B SPA - Teoria - Vers 2014Dokument32 Seiten2210B SPA - Teoria - Vers 2014Johan MorenoNoch keine Bewertungen
- Sistema de Llenado Automatico de AguaDokument16 SeitenSistema de Llenado Automatico de AguaFreddyLMNoch keine Bewertungen
- Teoria ContactoresDokument29 SeitenTeoria Contactoresleitoguevofrito100% (1)
- Informe 6 Medicion en Capacitancia en CADokument18 SeitenInforme 6 Medicion en Capacitancia en CAErick GlenNoch keine Bewertungen
- 2021 - Trabajo Practico - Simbologia Diagrama P&IDDokument5 Seiten2021 - Trabajo Practico - Simbologia Diagrama P&IDLautaro AguilarNoch keine Bewertungen
- Automatismo LadderDokument6 SeitenAutomatismo LadderDaniel E. Taveras100% (1)
- Tempo Riz AdoresDokument8 SeitenTempo Riz AdoresjoseNoch keine Bewertungen
- Curso Introduccion A La ElectroneumaticaDokument88 SeitenCurso Introduccion A La ElectroneumaticaFidelNoch keine Bewertungen
- Diagramas en Escalera de Un PLCDokument8 SeitenDiagramas en Escalera de Un PLCPrajedis De La Fuente AlvarezNoch keine Bewertungen
- Ejercicios PLCDokument37 SeitenEjercicios PLCRolando Ojeda CasanovaNoch keine Bewertungen
- Labview PracticasDokument37 SeitenLabview PracticasManuel ForvNoch keine Bewertungen
- Taller Virtual LogoDokument23 SeitenTaller Virtual LogoCarlithos Cobama RalipNoch keine Bewertungen
- Puertas LogicasDokument33 SeitenPuertas Logicaspunkrocker521Noch keine Bewertungen
- Conexión PLC sx2Dokument17 SeitenConexión PLC sx2Deyanira Guzman Escobar100% (1)
- Practica 3 AutomatizacionDokument7 SeitenPractica 3 Automatizacionstefany toroNoch keine Bewertungen
- Proceso: ProcesoDokument64 SeitenProceso: Procesobeside 01Noch keine Bewertungen
- Presentacion PLC EatonDokument14 SeitenPresentacion PLC EatonArismendy de Jesus Estevez NuñezNoch keine Bewertungen
- Ejericios Grafcet UPCO ICAIDokument2 SeitenEjericios Grafcet UPCO ICAIJuan Sebastián Leguizamon ArchilaNoch keine Bewertungen
- Controladores AutosintonizablesDokument24 SeitenControladores AutosintonizablesJose Antonio PinGlo MarkzNoch keine Bewertungen
- p1 - Grafcet Marcha-Paro Kop 2018Dokument7 Seitenp1 - Grafcet Marcha-Paro Kop 2018JM CuevasNoch keine Bewertungen
- Controlador PidDokument4 SeitenControlador PidBlas FigueroaNoch keine Bewertungen
- Taller 1 - Logica Cableada - Automatización de ProcesosDokument3 SeitenTaller 1 - Logica Cableada - Automatización de ProcesosFrancisco Meza RíosNoch keine Bewertungen
- CPI2 Examen UF3Dokument2 SeitenCPI2 Examen UF3acajahuaringaNoch keine Bewertungen
- Controles Eléctricos y Automatización - Informe - 4Dokument17 SeitenControles Eléctricos y Automatización - Informe - 4ROSAS MONTALVO JESUSNoch keine Bewertungen
- GRAPH v1 6Dokument50 SeitenGRAPH v1 6Freddy Javier Orbes0% (1)
- Ponencia 44 ResesatepptDokument30 SeitenPonencia 44 ResesatepptLuzvi SánchezNoch keine Bewertungen
- Hy05osvsajfumkpq6jig Manual de Simulaci N Tia Portal - Webinar Week 2022Dokument16 SeitenHy05osvsajfumkpq6jig Manual de Simulaci N Tia Portal - Webinar Week 2022Luis CarrascoNoch keine Bewertungen
- Interruptor InalambricoDokument3 SeitenInterruptor InalambricoAnderson Agredo MesaNoch keine Bewertungen
- Televisión digital y telecomunicaciones en comunidades de propietariosVon EverandTelevisión digital y telecomunicaciones en comunidades de propietariosNoch keine Bewertungen
- Funciones Especiales Control de Los Movimientos de Subida yDokument5 SeitenFunciones Especiales Control de Los Movimientos de Subida yCanek UnoNoch keine Bewertungen
- Laboratorio N º 4Dokument4 SeitenLaboratorio N º 4Saul ForondaNoch keine Bewertungen
- Sec de Problemas para Clase de PLC CBTis #11Dokument3 SeitenSec de Problemas para Clase de PLC CBTis #11Ruben AlvarezNoch keine Bewertungen
- Informe N°4Dokument7 SeitenInforme N°4danielaNoch keine Bewertungen
- Ejercicios y PracticasDokument13 SeitenEjercicios y Practicasbersacresc2100% (1)
- Practicas AutomatismosDokument8 SeitenPracticas AutomatismosJose Maria Mendez SordoNoch keine Bewertungen
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 1 von 5 Sternen1/5 (2)
- Formato para Solicitud de Contingentes - Dosificadoras CementosDokument3 SeitenFormato para Solicitud de Contingentes - Dosificadoras CementosJessica LeivaNoch keine Bewertungen
- Asignación Individual IV de Jessica LeivaDokument4 SeitenAsignación Individual IV de Jessica LeivaJessica LeivaNoch keine Bewertungen
- Planteamiento de Proyecto de PLCDokument1 SeitePlanteamiento de Proyecto de PLCJessica LeivaNoch keine Bewertungen
- Uso de MemoriasDokument1 SeiteUso de MemoriasJessica LeivaNoch keine Bewertungen
- Programacion Utilizando GrafcetDokument13 SeitenProgramacion Utilizando GrafcetJessica LeivaNoch keine Bewertungen
- Clase 3. GrafcetDokument13 SeitenClase 3. GrafcetJessica LeivaNoch keine Bewertungen
- Trabajo de MATLABDokument4 SeitenTrabajo de MATLABJessica LeivaNoch keine Bewertungen
- Ejercicios Unidad III y IVDokument1 SeiteEjercicios Unidad III y IVJessica Leiva100% (2)
- Motor 1.9 - 2.2 16V JTSDokument20 SeitenMotor 1.9 - 2.2 16V JTSadrianvalde994Noch keine Bewertungen
- Sistema de Detracciones Del IgvDokument37 SeitenSistema de Detracciones Del IgvRosario Soto GNoch keine Bewertungen
- Puente Puerto Dorado (Tumbes)Dokument4 SeitenPuente Puerto Dorado (Tumbes)rafaelrodgar_7642429Noch keine Bewertungen
- TDR Adecuación Infraestructura Polvorines.v2Dokument16 SeitenTDR Adecuación Infraestructura Polvorines.v2Victor EduardoNoch keine Bewertungen
- AT2 Motoniveladora 14MDokument6 SeitenAT2 Motoniveladora 14MBeder Mauricio Cayatopa QuispeNoch keine Bewertungen
- Brochure Curso de Domótica - 24 AgoDokument5 SeitenBrochure Curso de Domótica - 24 AgoDante Heredia ObregonNoch keine Bewertungen
- Correlaciones PVTDokument30 SeitenCorrelaciones PVTMario TrejoNoch keine Bewertungen
- Optimize Glass Fish Performance - En.esDokument24 SeitenOptimize Glass Fish Performance - En.esRodolfo Heredia100% (1)
- PRÁCTICA 03 - CinemáticaDokument2 SeitenPRÁCTICA 03 - Cinemáticaandrea78594Noch keine Bewertungen
- Lavadoras Inverter-1Dokument14 SeitenLavadoras Inverter-1Alejandro Cedeño MezaNoch keine Bewertungen
- Inventario Vial Basico: Personal: Se Implementa Cuadrillas de Medición y Georeferenciacion Con Conductor TécnicoDokument7 SeitenInventario Vial Basico: Personal: Se Implementa Cuadrillas de Medición y Georeferenciacion Con Conductor TécnicosantiagoNoch keine Bewertungen
- Cuadro de Mando de Indicadores KPIDokument2 SeitenCuadro de Mando de Indicadores KPIdavtitoNoch keine Bewertungen
- Pts Energias PeligrosasDokument11 SeitenPts Energias PeligrosasGerman SaavedraNoch keine Bewertungen
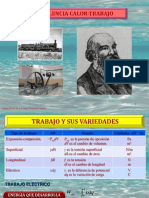
- Equivalencia Calor TrabajoDokument12 SeitenEquivalencia Calor TrabajoCharlyNoch keine Bewertungen
- Habilidades Que Todo Programador Debe de TenerDokument3 SeitenHabilidades Que Todo Programador Debe de TenerKike Jimenez RomeroNoch keine Bewertungen
- DD022 CP CO Esp v2r0 PracticaDokument4 SeitenDD022 CP CO Esp v2r0 PracticaBaltazar Flores MelinaNoch keine Bewertungen
- Practica 1 Balanza de Pesos MuertosDokument4 SeitenPractica 1 Balanza de Pesos MuertoslightninfireNoch keine Bewertungen
- Material AcripolDokument3 SeitenMaterial AcripolSamaraFonnegraArangoNoch keine Bewertungen
- Leyes Informaticas Todas PDFDokument38 SeitenLeyes Informaticas Todas PDFAlfredo JoseNoch keine Bewertungen
- Proyecto Ingeniería de TransitoDokument46 SeitenProyecto Ingeniería de TransitoKevin SantiagoNoch keine Bewertungen
- Parcial 4Dokument8 SeitenParcial 4wilfredo OrellanaNoch keine Bewertungen
- Disipadores de Energia en CanalesDokument23 SeitenDisipadores de Energia en CanalesDeibyMijailRequenaMarcelo100% (2)
- Libro de Instrucciones PDF ChimeneasDokument27 SeitenLibro de Instrucciones PDF Chimeneasmario melladoNoch keine Bewertungen
- Common RailDokument2 SeitenCommon RailJhonImaNoch keine Bewertungen
- Reporte de PrácticaDokument21 SeitenReporte de PrácticaVitore MorleoneNoch keine Bewertungen
- Secuencia Didáctica Programación LinealDokument7 SeitenSecuencia Didáctica Programación LinealLorena Mabel GuiñazúNoch keine Bewertungen
- TEMA 1 - SISTEMAS DE REPRESENTACIÓN GRÁFICA - Elementos Amovibles y Fijos No Estructurales (SUA 1)Dokument14 SeitenTEMA 1 - SISTEMAS DE REPRESENTACIÓN GRÁFICA - Elementos Amovibles y Fijos No Estructurales (SUA 1)Alma Delia Acosta MartinezNoch keine Bewertungen
- Torre de Destilacion ControladaDokument17 SeitenTorre de Destilacion ControladaAndres MinaNoch keine Bewertungen
- Lab.3 Bomba CentrifugaDokument25 SeitenLab.3 Bomba Centrifugahagi andres carrilloNoch keine Bewertungen
- Mejoramiento de SuelosDokument33 SeitenMejoramiento de SuelosManuel Zamudio ZeladaNoch keine Bewertungen