Das könnte Ihnen auch gefallen
- How To Make Cell Phone Signal JammerDokument12 SeitenHow To Make Cell Phone Signal JammerMoata Haile50% (2)
- Operational AmplifiersDokument13 SeitenOperational Amplifiersabhey1991100% (2)
- RF Measurement 1Dokument26 SeitenRF Measurement 1Shah ShrujanNoch keine Bewertungen
- WaveletFiltering PDFDokument96 SeitenWaveletFiltering PDFÁron FehérNoch keine Bewertungen
- 4000 Series Logic and Analog CircuitryDokument13 Seiten4000 Series Logic and Analog Circuitrysage.electconNoch keine Bewertungen
- Chapter SixDokument5 SeitenChapter Sixyunus memonNoch keine Bewertungen
- HCC4051B/52B/53B HCF4051B/52B/53B: Analog Multiplexers-DemultiplexersDokument17 SeitenHCC4051B/52B/53B HCF4051B/52B/53B: Analog Multiplexers-DemultiplexersJaiprasad ReddyNoch keine Bewertungen
- L8 Understanding Atmega328P 1Dokument22 SeitenL8 Understanding Atmega328P 1VIGHNESH AIYANoch keine Bewertungen
- Analog To Digital ConverterDokument17 SeitenAnalog To Digital ConverterIshita Sarkar100% (1)
- Expt - 9 - R-2R Ladder DAC - 20-21Dokument11 SeitenExpt - 9 - R-2R Ladder DAC - 20-21Noh NaimNoch keine Bewertungen
- Feedback Amplifiers ExplainedDokument21 SeitenFeedback Amplifiers ExplainedKaviyaNoch keine Bewertungen
- EE2207 Lab ManualDokument72 SeitenEE2207 Lab ManualgowthamveluNoch keine Bewertungen
- FSK Demodulator With PLLDokument5 SeitenFSK Demodulator With PLLFlashPTNoch keine Bewertungen
- Lab6 Phase Locked LoopsDokument20 SeitenLab6 Phase Locked Loopsuitce2011Noch keine Bewertungen
- Fire Detection and ControlDokument16 SeitenFire Detection and ControlvaisnanyNoch keine Bewertungen
- DDS RF Signal Generator Design GuideDokument9 SeitenDDS RF Signal Generator Design GuideIan McNairNoch keine Bewertungen
- RF Communication Circuits S-ParametersDokument55 SeitenRF Communication Circuits S-ParametersAnonymous U8awvgZ3pDNoch keine Bewertungen
- 01 Basic Spectrum Analysis 1 - RevDokument34 Seiten01 Basic Spectrum Analysis 1 - RevRawat PilasaromNoch keine Bewertungen
- Application of The Pathloss Software-ADokument52 SeitenApplication of The Pathloss Software-ADimas RioNoch keine Bewertungen
- Sadiku Practice Problem Solution PDFDokument177 SeitenSadiku Practice Problem Solution PDFIshan Solanki0% (1)
- Digital Power-Conversion For The Analog EngineerDokument12 SeitenDigital Power-Conversion For The Analog EngineerfjwoemcuNoch keine Bewertungen
- Pathloss 4.0 & MW Link Planning Part 1Dokument64 SeitenPathloss 4.0 & MW Link Planning Part 1Dimas Rio67% (3)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- Study of R2R 4-Bit and 8-Bit DAC Circuit Using Multisim TechnologyDokument5 SeitenStudy of R2R 4-Bit and 8-Bit DAC Circuit Using Multisim TechnologyJessica GilesNoch keine Bewertungen
- A3 1 1IntroductionFlipFlopsDokument5 SeitenA3 1 1IntroductionFlipFlopsGoran MateiaseviciNoch keine Bewertungen
- Logic Gates & AmplifiersDokument103 SeitenLogic Gates & AmplifiersAnusha NatarajanNoch keine Bewertungen
- Digital Clock Design and SimulationDokument20 SeitenDigital Clock Design and SimulationAnup PatelNoch keine Bewertungen
- Chapter 4 - RF Oscillators and Frequency SynthesizersDokument55 SeitenChapter 4 - RF Oscillators and Frequency SynthesizersNhat Tran Xuan100% (1)
- EI2353 DSDQbankDokument24 SeitenEI2353 DSDQbankRaja RockNoch keine Bewertungen
- Lecture 12 Binary Adder-SubtractorDokument8 SeitenLecture 12 Binary Adder-SubtractorSasi Kiran SNoch keine Bewertungen
- Monostable Multivibrator: Pre-LabDokument6 SeitenMonostable Multivibrator: Pre-LabRiya Saluja100% (1)
- LAB 1 Op AmpDokument11 SeitenLAB 1 Op AmpamirulNoch keine Bewertungen
- Construction and verification of half/full adder using logic gatesDokument5 SeitenConstruction and verification of half/full adder using logic gatesbcetonlineNoch keine Bewertungen
- Nemesis Player Aid Flow Charts Printer-Friendly v4Dokument6 SeitenNemesis Player Aid Flow Charts Printer-Friendly v4David SolanoNoch keine Bewertungen
- LVDTDokument8 SeitenLVDTAnirban GhoshNoch keine Bewertungen
- Two Mark Questions For DSDDokument17 SeitenTwo Mark Questions For DSDvnirmalacseNoch keine Bewertungen
- Experiment No. 01 Experiment Name-ASK ModulationDokument47 SeitenExperiment No. 01 Experiment Name-ASK ModulationmuskanNoch keine Bewertungen
- Eca Lab Manual PDFDokument56 SeitenEca Lab Manual PDFrppvch100% (5)
- Digital Lab Manual V2.1Dokument120 SeitenDigital Lab Manual V2.1Marwan AffandiNoch keine Bewertungen
- Basic VLSI SlidesDokument91 SeitenBasic VLSI SlidesDivya AhujaNoch keine Bewertungen
- Assignment1 QuestionDokument12 SeitenAssignment1 QuestionRubyat100% (1)
- Multistage Transistor AmplifiersDokument8 SeitenMultistage Transistor Amplifiersbree789Noch keine Bewertungen
- Digital Logic FundamentalsDokument48 SeitenDigital Logic Fundamentalsapi-3701035100% (1)
- 2-Bit Magnitude Comparator Design Using Logic StylesDokument12 Seiten2-Bit Magnitude Comparator Design Using Logic StylesSunith CkNoch keine Bewertungen
- 10ESL37 - Analog Electronics Lab ManualDokument69 Seiten10ESL37 - Analog Electronics Lab ManualVinita AgrawalNoch keine Bewertungen
- Registers and CountersDokument28 SeitenRegisters and CountersHammadMehmoodNoch keine Bewertungen
- EC2257-Lab Manual For Circuits and Simulation Integrated LaboratoryDokument38 SeitenEC2257-Lab Manual For Circuits and Simulation Integrated Laboratorygokila_dr9897Noch keine Bewertungen
- Study Gates, Flip-Flops LabDokument51 SeitenStudy Gates, Flip-Flops Labsudipta2580Noch keine Bewertungen
- Analog-To-digital Converter - Wikipedia, The Free EncyclopediaDokument6 SeitenAnalog-To-digital Converter - Wikipedia, The Free EncyclopediaAziz SahatNoch keine Bewertungen
- Signal Conditioning CircuitsDokument115 SeitenSignal Conditioning CircuitsAmmad Ilyas100% (1)
- Digital Modulation PDFDokument41 SeitenDigital Modulation PDFPabitraMandalNoch keine Bewertungen
- Continuous Assessment Cover Sheet AnalysisDokument22 SeitenContinuous Assessment Cover Sheet AnalysisBuddhiNoch keine Bewertungen
- TRANSMISSION LINES Part 2 3Dokument53 SeitenTRANSMISSION LINES Part 2 3Em ReyesNoch keine Bewertungen
- Energy Band DiagramDokument30 SeitenEnergy Band DiagramShreyasKamatNoch keine Bewertungen
- The Digital Encoder: 4-To-2 Bit Binary EncoderDokument10 SeitenThe Digital Encoder: 4-To-2 Bit Binary EncoderJohn Brix BalisterosNoch keine Bewertungen
- Latch and Flip-FlopDokument58 SeitenLatch and Flip-FlopDalila Nadia RazaliNoch keine Bewertungen
- R-2R DAC and ADC AnalysisDokument27 SeitenR-2R DAC and ADC Analysiskaka_huzefa100% (1)
- Lab 4 Half Wave and Full WaveDokument8 SeitenLab 4 Half Wave and Full WaveRashid Rind Rashid Rind100% (1)
- Chapter1 - Integrated-Circuit Logic FamilyDokument52 SeitenChapter1 - Integrated-Circuit Logic FamilyTheodore KyriakopoulosNoch keine Bewertungen
- Vector ScopeDokument3 SeitenVector ScopeAhLevChaNoch keine Bewertungen
- Pathloss 4.0 & MW Link Planning Part 3Dokument46 SeitenPathloss 4.0 & MW Link Planning Part 3Dimas RioNoch keine Bewertungen
- Nec 2 PRT 3Dokument134 SeitenNec 2 PRT 3Juan Antonio FuentesNoch keine Bewertungen
- Pathloss 4.0 & MW Link Planning Part 2Dokument41 SeitenPathloss 4.0 & MW Link Planning Part 2Dimas RioNoch keine Bewertungen
- ATM AlcatelDokument106 SeitenATM AlcatelAnil YadavNoch keine Bewertungen
- A Beginner S Guide To Modeling With Nec - Part 1Dokument5 SeitenA Beginner S Guide To Modeling With Nec - Part 1CARROUCHO62Noch keine Bewertungen
- Direction Finders 51: Introduction Into Theory of Direction FindingDokument4 SeitenDirection Finders 51: Introduction Into Theory of Direction FindingDimas RioNoch keine Bewertungen
- Direction Finders 51: Introduction Into Theory of Direction FindingDokument4 SeitenDirection Finders 51: Introduction Into Theory of Direction FindingDimas RioNoch keine Bewertungen
- Direction Finders 51: Introduction Into Theory of Direction FindingDokument4 SeitenDirection Finders 51: Introduction Into Theory of Direction FindingDimas RioNoch keine Bewertungen
- EC6404-Linear Integrated Circuits Question BankDokument7 SeitenEC6404-Linear Integrated Circuits Question BankkundaviNoch keine Bewertungen
- Cy520 Datasheet: 300M-450Mhz Ask ReceiverDokument17 SeitenCy520 Datasheet: 300M-450Mhz Ask ReceiverMadhusudanan AshokNoch keine Bewertungen
- RESIT MEASUREMENT SCIENCE 2012 EXAMDokument9 SeitenRESIT MEASUREMENT SCIENCE 2012 EXAMAxel PalaciosNoch keine Bewertungen
- Esc201: Introduction To Electronics: Shilpi Gupta Dept. of Electrical Engineering Iit KanpurDokument27 SeitenEsc201: Introduction To Electronics: Shilpi Gupta Dept. of Electrical Engineering Iit KanpurShreyaNoch keine Bewertungen
- Elektor (Nonlinear - Ir) 1976-04 - TextDokument54 SeitenElektor (Nonlinear - Ir) 1976-04 - TextQuincheNoch keine Bewertungen
- Course OutlineDokument4 SeitenCourse OutlineSalome ChivimaNoch keine Bewertungen
- LA1787MDokument54 SeitenLA1787MAgus BrewsNoch keine Bewertungen
- 2.5, Quad, SPST, CMOS Analog Switches: General Description FeaturesDokument12 Seiten2.5, Quad, SPST, CMOS Analog Switches: General Description FeaturesAlekseyyyNoch keine Bewertungen
- class-AB Voltage Follower2006Dokument2 Seitenclass-AB Voltage Follower2006tuanka1Noch keine Bewertungen
- Electronics Primer: RC Filters and Op-Amp BasicsDokument11 SeitenElectronics Primer: RC Filters and Op-Amp BasicsAlexandre RamosNoch keine Bewertungen
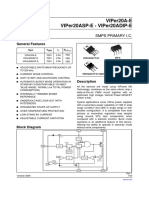
- Viper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesDokument33 SeitenViper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesAdriánNoch keine Bewertungen
- 1 Unit 2 Flip FlopsDokument23 Seiten1 Unit 2 Flip FlopsShivangi SharmaNoch keine Bewertungen
- XC6503 TorexDokument22 SeitenXC6503 TorexLoengrin MontillaNoch keine Bewertungen
- Octal Bus Buffer With 3 State Outputs (Non Inverted) : PD CC oDokument9 SeitenOctal Bus Buffer With 3 State Outputs (Non Inverted) : PD CC ocriman45Noch keine Bewertungen
- MM74HC139 Dual 2-To-4 Line Decoder: General DescriptionDokument7 SeitenMM74HC139 Dual 2-To-4 Line Decoder: General DescriptionnizarfebNoch keine Bewertungen
- Linear Technology Package Cross ReferenceDokument3 SeitenLinear Technology Package Cross ReferenceDENIS_STARCOMNoch keine Bewertungen
- Class B Complementary SymmetryDokument4 SeitenClass B Complementary SymmetryKiran KumarNoch keine Bewertungen
- PSA BSI Module Wiring DiagramsDokument9 SeitenPSA BSI Module Wiring DiagramsMissoum TerrasNoch keine Bewertungen
- Assignment ModelDokument8 SeitenAssignment ModelKarthik KarthiksNoch keine Bewertungen
- ISO5500 2.5-A Isolated IGBT, MOSFET Gate Driver: 1 Features 3 DescriptionDokument45 SeitenISO5500 2.5-A Isolated IGBT, MOSFET Gate Driver: 1 Features 3 DescriptionBubai BhattacharyyaNoch keine Bewertungen
- VHF Transceivers: S-14319XZ-C1 Feb. 2007Dokument36 SeitenVHF Transceivers: S-14319XZ-C1 Feb. 2007XHieu NguyenNoch keine Bewertungen
- Analog-To-Digital (A/D) and Digital-To-Analog (D/A) ConversionDokument15 SeitenAnalog-To-Digital (A/D) and Digital-To-Analog (D/A) ConversionproteuscarrillusNoch keine Bewertungen
- Introduce students to BJT transistor characteristics through I-V curvesDokument9 SeitenIntroduce students to BJT transistor characteristics through I-V curvesMano EndlaNoch keine Bewertungen
- NMK 30103 Chapter 2 Part 2 Amplitude Modulation CircuitsDokument25 SeitenNMK 30103 Chapter 2 Part 2 Amplitude Modulation CircuitsMuhammad Iskandar Bin AzlanNoch keine Bewertungen
- EncoderDokument8 SeitenEncoderIvan IntroNoch keine Bewertungen
- EE-209L Electronic Circuit Design Lab PlanDokument3 SeitenEE-209L Electronic Circuit Design Lab PlanUmar AkhtarNoch keine Bewertungen
- The FSK Mode WaDokument4 SeitenThe FSK Mode WaNareshNoch keine Bewertungen