Das könnte Ihnen auch gefallen
- Subsea Compleations-Offshore EngineeringDokument11 SeitenSubsea Compleations-Offshore EngineeringBasem TamNoch keine Bewertungen
- Cameron Subsea Systems PDFDokument49 SeitenCameron Subsea Systems PDFasparagus1996100% (1)
- Optimisaton of Static Characteristics of A Lazy Wave RizerDokument23 SeitenOptimisaton of Static Characteristics of A Lazy Wave RizerAbiodunAremuOliyideNoch keine Bewertungen
- NORSOK Standard Design Requirements for Subsea Production SystemsDokument26 SeitenNORSOK Standard Design Requirements for Subsea Production SystemsCarolina TelesNoch keine Bewertungen
- SUBSEA SYSTEMS OVERVIEWDokument26 SeitenSUBSEA SYSTEMS OVERVIEWJae Sung KangNoch keine Bewertungen
- Subsea Equipment ListDokument8 SeitenSubsea Equipment ListiskanderNoch keine Bewertungen
- Oliveros, Kyle Gio M. Bspe 5B PTQ Riser SystemsDokument14 SeitenOliveros, Kyle Gio M. Bspe 5B PTQ Riser Systemsglenn vincent floresNoch keine Bewertungen
- Subsea Final)Dokument25 SeitenSubsea Final)국무성100% (1)
- Subsea ProcessingDokument32 SeitenSubsea ProcessingTai HuuNoch keine Bewertungen
- Monobore Sub SeaDokument9 SeitenMonobore Sub Seacamilo777Noch keine Bewertungen
- The Value Chain in SubseaDokument18 SeitenThe Value Chain in SubseaforthebestNoch keine Bewertungen
- Chapter 1: Subsea Production Systems: Definitions and AbbreviationsDokument14 SeitenChapter 1: Subsea Production Systems: Definitions and AbbreviationsDan Joban RotaNoch keine Bewertungen
- Subsea Presentation PDFDokument3 SeitenSubsea Presentation PDFSInowritaNoch keine Bewertungen
- Iwocs PDFDokument12 SeitenIwocs PDFmarquiname100% (2)
- Light Well Intervention System - LWISDokument2 SeitenLight Well Intervention System - LWISWilliam EvansNoch keine Bewertungen
- Offshore Subsea Structures and Subsea Systems AssignmentDokument16 SeitenOffshore Subsea Structures and Subsea Systems AssignmentGeorge Baby100% (2)
- Subsea Technology OverviewDokument43 SeitenSubsea Technology OverviewakhmadmarufnurNoch keine Bewertungen
- Sandoa Acoustic TelemetryDokument90 SeitenSandoa Acoustic Telemetrygsmsby100% (1)
- WHAT - Subsea All Electric SystemsDokument5 SeitenWHAT - Subsea All Electric SystemsvigneshnrynnNoch keine Bewertungen
- Subsea ProcessingDokument20 SeitenSubsea ProcessingVictor Tang100% (1)
- Subsea Production System - OverviewDokument24 SeitenSubsea Production System - OverviewMuhammad Nursalam100% (1)
- Subsea ControlDokument6 SeitenSubsea ControlPetroleumEngineeringNoch keine Bewertungen
- Assesment of Subsea Production and Well SystemsDokument202 SeitenAssesment of Subsea Production and Well SystemsJorge Cipriano100% (3)
- Integrated Subsea Facilities Design, Construction and Training ContractorsDokument7 SeitenIntegrated Subsea Facilities Design, Construction and Training ContractorsUyavie Obonna0% (1)
- SPE Paper Erosional Rates VelocitiesDokument10 SeitenSPE Paper Erosional Rates VelocitiesjnmanivannanmechNoch keine Bewertungen
- LECC 2011: Control UmbilicalsDokument20 SeitenLECC 2011: Control UmbilicalsSourav DeyNoch keine Bewertungen
- CVC SystemDokument55 SeitenCVC SystemPanirChelvan RamanathanNoch keine Bewertungen
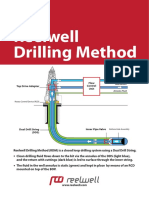
- Reelwell Drilling Method: Flow Control Unit Top Drive AdapterDokument2 SeitenReelwell Drilling Method: Flow Control Unit Top Drive AdapterFikri AlhabsyiNoch keine Bewertungen
- 2011 - Production Enhancement by Using Electrical Submersible PumpDokument66 Seiten2011 - Production Enhancement by Using Electrical Submersible PumpParesh Pawar100% (1)
- EG50F8 EG50G8 SubseaIntegrity Week1 Lecture1 17sep2015Dokument4 SeitenEG50F8 EG50G8 SubseaIntegrity Week1 Lecture1 17sep2015LesleyAnne RowandNoch keine Bewertungen
- FMC Subsea Field Development Challenges and Solution For Tie - in and Connection SystemDokument34 SeitenFMC Subsea Field Development Challenges and Solution For Tie - in and Connection SystemEyoma Etim100% (1)
- Subsea ManifoldsDokument5 SeitenSubsea ManifoldsBrittny LourdeNoch keine Bewertungen
- Advanced deepwater spool design optimizationDokument28 SeitenAdvanced deepwater spool design optimizationhiyeonNoch keine Bewertungen
- Oss Subsea Connectors BR PDFDokument12 SeitenOss Subsea Connectors BR PDFDheeraj Chowdary DhanekulaNoch keine Bewertungen
- An Introduction To Subsea ControlsDokument88 SeitenAn Introduction To Subsea Controlsammp201180% (5)
- Tuv Nel - Evaluation of Roxar MPFM2600 Multiphase Flowmeter PDFDokument23 SeitenTuv Nel - Evaluation of Roxar MPFM2600 Multiphase Flowmeter PDFReza GhanavatiNoch keine Bewertungen
- Subsea SystemsDokument22 SeitenSubsea Systemsajujk100% (2)
- Subsea Manual PDFDokument16 SeitenSubsea Manual PDFyg89Noch keine Bewertungen
- Subsea Manifold Systems for Cluster DevelopmentsDokument49 SeitenSubsea Manifold Systems for Cluster Developmentsady_fernando100% (4)
- Subsea Control System SPC 18030e05Dokument39 SeitenSubsea Control System SPC 18030e05Ahmad Rabie100% (1)
- Introduction To Subsea Systems Networks Part4Dokument43 SeitenIntroduction To Subsea Systems Networks Part4Kenaia AdeleyeNoch keine Bewertungen
- l6 Flow Assurance - 15pagesDokument16 Seitenl6 Flow Assurance - 15pagesAdetula Bamidele Opeyemi100% (1)
- NTNU, Pipelines, Risers and Subsea SystemsDokument18 SeitenNTNU, Pipelines, Risers and Subsea Systemsjduran_307951Noch keine Bewertungen
- 650-6118-D Rev.A - Technical Description PW VX Type B-E-GDokument22 Seiten650-6118-D Rev.A - Technical Description PW VX Type B-E-Gyfn1gbx2100% (1)
- Offshore Oil Production PlatformsDokument5 SeitenOffshore Oil Production PlatformsPuppy Ayu JatmikoNoch keine Bewertungen
- Ormen Lange Subsea Production SystemDokument3 SeitenOrmen Lange Subsea Production Systemssmanian68100% (1)
- Corrintec Subsea Brochure PDFDokument8 SeitenCorrintec Subsea Brochure PDFraaaghaffarNoch keine Bewertungen
- WHAT - Subsea Control Systems - LOW RESDokument7 SeitenWHAT - Subsea Control Systems - LOW RESawang_nasuhaNoch keine Bewertungen
- IWOCS Brochure Landscape A4Dokument11 SeitenIWOCS Brochure Landscape A4魏永涛Noch keine Bewertungen
- Integrated Digital Control SystemDokument8 SeitenIntegrated Digital Control SystemSwapanbasuNoch keine Bewertungen
- Cameron CVCDokument6 SeitenCameron CVCplatipus_85Noch keine Bewertungen
- IWOCSDokument4 SeitenIWOCSrcaletaNoch keine Bewertungen
- USB - John Dobby - Subsea Trees & Wellheads MAY 2014Dokument115 SeitenUSB - John Dobby - Subsea Trees & Wellheads MAY 2014solicocoNoch keine Bewertungen
- Deep Sea MooringDokument20 SeitenDeep Sea MooringsujitNoch keine Bewertungen
- S T e C K IDokument14 SeitenS T e C K Isurfin_bumpkinNoch keine Bewertungen
- Pipe Flow Fundamentals Rev 0Dokument81 SeitenPipe Flow Fundamentals Rev 0junaediwendiNoch keine Bewertungen
- Power Umbilicals and Cables Used To Provide Power and Various ControlDokument21 SeitenPower Umbilicals and Cables Used To Provide Power and Various ControlGaurav DixitNoch keine Bewertungen
- Pipe Flow Fundamentals Rev 0Dokument81 SeitenPipe Flow Fundamentals Rev 0junaediwendi100% (1)
- Hydraulics PDFDokument48 SeitenHydraulics PDFEdward NogueraNoch keine Bewertungen
- Compressed Air TutorialDokument16 SeitenCompressed Air TutorialTony Eduok100% (2)
- Hydraulic and Pneumatic CircuitsDokument8 SeitenHydraulic and Pneumatic CircuitsTony EduokNoch keine Bewertungen
- SubSea Deep Water Ball ValvesDokument12 SeitenSubSea Deep Water Ball ValvesTony Eduok100% (1)
- Siemens BubblerTheory 101Dokument3 SeitenSiemens BubblerTheory 101Anonymous zdCUbW8HfNoch keine Bewertungen
- 5.2 - Active Fire ProtectionDokument14 Seiten5.2 - Active Fire ProtectionTony EduokNoch keine Bewertungen
- Gas Turbine Performance Berns Juni13 3Dokument2 SeitenGas Turbine Performance Berns Juni13 3Tony EduokNoch keine Bewertungen
- Controllogix EthernetDokument129 SeitenControllogix EthernetjglunaNoch keine Bewertungen
- Advanced Thermoelectric Materials in Electrical and Electronic ApplicationsDokument5 SeitenAdvanced Thermoelectric Materials in Electrical and Electronic ApplicationsTony EduokNoch keine Bewertungen
- 2500 Level-Trol ControllerDokument6 Seiten2500 Level-Trol ControllerSrinivas GunasekaranNoch keine Bewertungen
- What Types of Thermocuple Are Mostly UsedDokument3 SeitenWhat Types of Thermocuple Are Mostly UsedTony EduokNoch keine Bewertungen
- Towards The Future of Gas Turbine Asset - T.alevarez - EndesaDokument3 SeitenTowards The Future of Gas Turbine Asset - T.alevarez - EndesaTony EduokNoch keine Bewertungen
- Gas Turbines Operation, Maintenance and TroubleshootingDokument2 SeitenGas Turbines Operation, Maintenance and TroubleshootingTony Eduok0% (1)
- Toshiba Power PlantDokument24 SeitenToshiba Power PlantMac Gerald Alindong100% (2)
- Pressure ControlDokument10 SeitenPressure ControlTony EduokNoch keine Bewertungen
- Nptel - Iitm.ac - in Courses Webcourse-Contents IISc-BANG Basic Thermodynamics PDF Module 1Dokument32 SeitenNptel - Iitm.ac - in Courses Webcourse-Contents IISc-BANG Basic Thermodynamics PDF Module 1lakumas15Noch keine Bewertungen
- SCA Technical Spec GE Frame 9E S Rev1 9e SpecificationDokument144 SeitenSCA Technical Spec GE Frame 9E S Rev1 9e Specificationzhangj5100% (2)
- Directional Control ValvesDokument8 SeitenDirectional Control ValvesTony EduokNoch keine Bewertungen
- Basic Electric Motor TheoryDokument2 SeitenBasic Electric Motor TheorybrainconcussionNoch keine Bewertungen
- Valves Used in PipelinesDokument15 SeitenValves Used in PipelinesTony EduokNoch keine Bewertungen
- Gas Turbine ThermodynamicsDokument2 SeitenGas Turbine ThermodynamicsTony EduokNoch keine Bewertungen
- GE Gas Turbines)Dokument128 SeitenGE Gas Turbines)Tony Eduok83% (12)
- Maximo GuideDokument455 SeitenMaximo GuideKannan Balamurugan100% (2)
- Distributed Control Systems (DCS)Dokument2 SeitenDistributed Control Systems (DCS)Syamkumar Sasidharan25% (4)
- Maximo 6 Training Guide EnglishDokument43 SeitenMaximo 6 Training Guide EnglishTony EduokNoch keine Bewertungen
- DCS For Thermal Power PlantDokument19 SeitenDCS For Thermal Power PlantTony EduokNoch keine Bewertungen
- Three Phase Transformer Winding ConfigurationsDokument40 SeitenThree Phase Transformer Winding ConfigurationsbudanaNoch keine Bewertungen
- Electric Power Distribution FeederDokument19 SeitenElectric Power Distribution FeederTony EduokNoch keine Bewertungen
- 02.understanding Process Equipment For Operators & Engineers-69Dokument5 Seiten02.understanding Process Equipment For Operators & Engineers-69rahulNoch keine Bewertungen
- X IomDokument28 SeitenX IomMoustafa HelmyNoch keine Bewertungen
- Amsco Evolution - Data SheetDokument8 SeitenAmsco Evolution - Data SheetTiến NguyễnNoch keine Bewertungen
- Cat 3412 Pump Tecni 1Dokument22 SeitenCat 3412 Pump Tecni 1INGISMAELMORENO100% (5)
- British Progress in Pumps and Pumping EnginesDokument204 SeitenBritish Progress in Pumps and Pumping EnginesVictor MartinezNoch keine Bewertungen
- Válvulas Diafragma GOYEN (Autolimpieza Turbinas)Dokument24 SeitenVálvulas Diafragma GOYEN (Autolimpieza Turbinas)Rigoberto LozanoNoch keine Bewertungen
- S REICH Liquid and Chemical PumpDokument12 SeitenS REICH Liquid and Chemical PumpManuel AlejandroNoch keine Bewertungen
- What Has Changed in API 521 6EDDokument19 SeitenWhat Has Changed in API 521 6EDgateauxboy100% (1)
- Steam Turbine MaintenanceDokument54 SeitenSteam Turbine MaintenanceGovindarajan Chandrasekaran100% (3)
- Solenoid - How It Works and Troubleshooting GuideDokument13 SeitenSolenoid - How It Works and Troubleshooting GuideAdham Abd El KareemNoch keine Bewertungen
- Ma 0702 05 en 00 - Setup ManualDokument214 SeitenMa 0702 05 en 00 - Setup ManualRoronoa ZorroNoch keine Bewertungen
- Bunker checklist 40Dokument3 SeitenBunker checklist 40Roshan PandeyNoch keine Bewertungen
- Crude Sampling Device IOM-135Dokument15 SeitenCrude Sampling Device IOM-135Stephen MalobaNoch keine Bewertungen
- 4058 73 DA1 001 01 Refractory Dry Out CycleDokument6 Seiten4058 73 DA1 001 01 Refractory Dry Out CyclePraful PatilNoch keine Bewertungen
- Operational Information The MAN B&W MC Engine VIT Fuel PumpDokument16 SeitenOperational Information The MAN B&W MC Engine VIT Fuel PumpAbhishek Singh Chauhan100% (1)
- Pump E Series Manual - v2Dokument36 SeitenPump E Series Manual - v2Morteza ShakerienNoch keine Bewertungen
- Sullair Air Care Seminars provide hands-on compressor trainingDokument110 SeitenSullair Air Care Seminars provide hands-on compressor trainingWaldemarDominguez0% (1)
- Project Guide B32 - 40A 2018Dokument145 SeitenProject Guide B32 - 40A 2018Guilherme Henrique FilhoNoch keine Bewertungen
- Manual Pneumatic Controller S80Dokument17 SeitenManual Pneumatic Controller S80lotfidk21100% (1)
- Passive Fire Proofing For Buildings andDokument8 SeitenPassive Fire Proofing For Buildings andTeknik produksi wikonNoch keine Bewertungen
- CHOKE KILL MANIFOLD - 3.1-16-15k x 4.1-16-10 x 2.1-16-15KDokument2 SeitenCHOKE KILL MANIFOLD - 3.1-16-15k x 4.1-16-10 x 2.1-16-15KOP GAMERNoch keine Bewertungen
- Single Arm Pantograph Model: WBL22.03: Description Maintenance and Operating ManualDokument71 SeitenSingle Arm Pantograph Model: WBL22.03: Description Maintenance and Operating ManualKausik Das67% (3)
- Manual y Planos Muestreador de Aire Comprimido Microbiologico PinocchioDokument63 SeitenManual y Planos Muestreador de Aire Comprimido Microbiologico Pinocchiosami2210Noch keine Bewertungen
- M400-11 (E-7 Valve) PDFDokument32 SeitenM400-11 (E-7 Valve) PDFLazzarus Az GunawanNoch keine Bewertungen
- Design of Structures TCE PDFDokument87 SeitenDesign of Structures TCE PDFmanojmorye100% (1)
- 900 Lb. FM-200 Cylinder: FeaturesDokument2 Seiten900 Lb. FM-200 Cylinder: FeaturesLogan Marquez AguayoNoch keine Bewertungen
- BHEL Approved Molykote ProductsDokument2 SeitenBHEL Approved Molykote ProductsProject Sales CorpNoch keine Bewertungen
- Logic Elements Quick Reference GuideDokument84 SeitenLogic Elements Quick Reference GuideFederico TomiNoch keine Bewertungen
- Instrument Valves - PGI-IV PDFDokument32 SeitenInstrument Valves - PGI-IV PDFRahmat RiskiNoch keine Bewertungen
- Inlet and Exhaust Valves DesignDokument67 SeitenInlet and Exhaust Valves DesignmohanpusNoch keine Bewertungen