Das könnte Ihnen auch gefallen
- The UFO Book Encyclopedia of The Extraterrestrial (PDFDrive)Dokument756 SeitenThe UFO Book Encyclopedia of The Extraterrestrial (PDFDrive)James Lee Fallin100% (2)
- MI 276 Rev B - Conversion of Turbochargers For Opposite Engine RotationDokument15 SeitenMI 276 Rev B - Conversion of Turbochargers For Opposite Engine RotationJesse BarnettNoch keine Bewertungen
- Scan & Pay Jio BillDokument22 SeitenScan & Pay Jio BillsumeetNoch keine Bewertungen
- Sono ChemistryDokument4 SeitenSono ChemistryShyamol BoseNoch keine Bewertungen
- Electrochemistry PresentationDokument36 SeitenElectrochemistry PresentationMuhammad HaziqNoch keine Bewertungen
- Isotope Geology-1-14Dokument14 SeitenIsotope Geology-1-14LuisCruzNoch keine Bewertungen
- Ultrasonic Studies of Binary Liquid MixturesDokument41 SeitenUltrasonic Studies of Binary Liquid MixturesKarthi KeyanNoch keine Bewertungen
- GhostPeaks Part1Dokument4 SeitenGhostPeaks Part1Raga Bima100% (1)
- What Is A Lecher AntennaDokument4 SeitenWhat Is A Lecher AntennaPt AkaashNoch keine Bewertungen
- International Code of Zoological NomenclatureDokument106 SeitenInternational Code of Zoological NomenclatureJonathan P. MillerNoch keine Bewertungen
- An Introduction To Community DevelopmentDokument21 SeitenAn Introduction To Community DevelopmentThuyAnh NgnNoch keine Bewertungen
- Impedance Spectroscopy Material Science ApplicationsDokument18 SeitenImpedance Spectroscopy Material Science ApplicationsMatch BoxNoch keine Bewertungen
- Impedance SpectrosDokument10 SeitenImpedance SpectrosFabio Alejandro Gomez GomezNoch keine Bewertungen
- Adverb Affirmation Negation LessonDokument4 SeitenAdverb Affirmation Negation LessonMire-chan Bacon100% (1)
- SS NMR TimescaleDokument3 SeitenSS NMR TimescaleMarióxido de SodioNoch keine Bewertungen
- Application Note - Trace Metals in Waters by GFAAS, in Accordance With U.S. EPA and Health Canada RequirementsDokument5 SeitenApplication Note - Trace Metals in Waters by GFAAS, in Accordance With U.S. EPA and Health Canada RequirementsNguyễnHoàngDanhNoch keine Bewertungen
- Bioenergetics of Aquatic AnimalsDokument182 SeitenBioenergetics of Aquatic AnimalsDaniel FernándezNoch keine Bewertungen
- Dangerous Health Effects of Home Burning of Plastics and WasteDokument2 SeitenDangerous Health Effects of Home Burning of Plastics and Wasten3v3rmor33Noch keine Bewertungen
- EtomDokument1 SeiteEtomarthryxNoch keine Bewertungen
- 2021 WTS 12 Organic ChemistryDokument56 Seiten2021 WTS 12 Organic ChemistryGladwell PhetlaNoch keine Bewertungen
- The Field: Health Services InformationDokument34 SeitenThe Field: Health Services InformationRyan Michael Oducado100% (4)
- PB y As Perkin Elmer PDFDokument5 SeitenPB y As Perkin Elmer PDFChipo ChipNoch keine Bewertungen
- Chapter1 (Lecture Note)Dokument53 SeitenChapter1 (Lecture Note)taechimNoch keine Bewertungen
- Eutrophication: Jayeshkumar Nikam (07D07028)Dokument42 SeitenEutrophication: Jayeshkumar Nikam (07D07028)Nikam Jayeshkumar JairamNoch keine Bewertungen
- BlastocladiomycotaDokument2 SeitenBlastocladiomycotasujithas100% (1)
- Phy ChemDokument248 SeitenPhy ChemBitter SugarNoch keine Bewertungen
- (Vladimir N. Bashkin) Modern Biogeochemistry EnviDokument446 Seiten(Vladimir N. Bashkin) Modern Biogeochemistry EnviMirela KlisurićNoch keine Bewertungen
- BIOM9027Dokument12 SeitenBIOM9027Kajaruban SurendranNoch keine Bewertungen
- What Impacts Biodiversity in GautengDokument14 SeitenWhat Impacts Biodiversity in GautengErnst SmitNoch keine Bewertungen
- Appendix B - Descriptions of The 230 Space GroupsDokument36 SeitenAppendix B - Descriptions of The 230 Space GroupsQiang Sun100% (1)
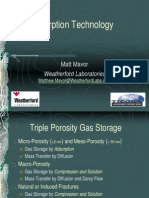
- Gas Desorption Measurement Overview MavorDokument33 SeitenGas Desorption Measurement Overview MavorTran Dang SangNoch keine Bewertungen
- Plasma Simulation by Artificial Dielectrics and Parallel-Plate Media-Xy9Dokument14 SeitenPlasma Simulation by Artificial Dielectrics and Parallel-Plate Media-Xy9archie222222Noch keine Bewertungen
- Coral Reefs Under Rapid Climate Change and Ocean AcidificationDokument7 SeitenCoral Reefs Under Rapid Climate Change and Ocean AcidificationKelly GutierrezNoch keine Bewertungen
- Potentiometric Mass Titrations Experimental and Theoretical Establishment of PZC of Metal OxidesDokument11 SeitenPotentiometric Mass Titrations Experimental and Theoretical Establishment of PZC of Metal OxidesalkimiaNoch keine Bewertungen
- Wildlife and Wind Farms - Conflicts and Solutions: Onshore: Monitoring and MitigationVon EverandWildlife and Wind Farms - Conflicts and Solutions: Onshore: Monitoring and MitigationMartin PerrowNoch keine Bewertungen
- Project ReportDokument26 SeitenProject ReportpriyankaNoch keine Bewertungen
- Minamata Disease: Mercury PoisoningDokument18 SeitenMinamata Disease: Mercury PoisoningBijay Kumar MahatoNoch keine Bewertungen
- Environmental Notes NEWDokument31 SeitenEnvironmental Notes NEWtvineethNoch keine Bewertungen
- CFD Simulation of Mono Disperse Droplet Generation by Means of Jet Break-UpDokument20 SeitenCFD Simulation of Mono Disperse Droplet Generation by Means of Jet Break-UpZeSnexNoch keine Bewertungen
- WRF Physics OverviewDokument79 SeitenWRF Physics Overviewraiz123Noch keine Bewertungen
- Neutron SourcesDokument64 SeitenNeutron SourcesJenodi100% (1)
- BiotransportDokument8 SeitenBiotransportAbass AbdolahiNoch keine Bewertungen
- LCMS Introduction Part 2Dokument34 SeitenLCMS Introduction Part 2rostaminasabNoch keine Bewertungen
- Topic 5 - Microbial HabitatDokument87 SeitenTopic 5 - Microbial HabitatWahyuni IrmalNoch keine Bewertungen
- Application of Stable Isotopes in PetroleumDokument18 SeitenApplication of Stable Isotopes in PetroleumAmar Shah100% (2)
- Nuclear Reactor Physics: Neutron Chain Fission ReactorDokument45 SeitenNuclear Reactor Physics: Neutron Chain Fission ReactorSit LucasNoch keine Bewertungen
- Department of Chemistry GC Women University, Sialkot: Name: Roll No.Dokument2 SeitenDepartment of Chemistry GC Women University, Sialkot: Name: Roll No.Esha Rani Waheed100% (1)
- chuẩn bị lab 5Dokument4 Seitenchuẩn bị lab 5Maria Anh ThưNoch keine Bewertungen
- Environmental Issues Hand Written NotesDokument15 SeitenEnvironmental Issues Hand Written NotesChirag RajpalNoch keine Bewertungen
- Viva-Voce Questions For II Puc Practical 2024 Dr. BSKDokument11 SeitenViva-Voce Questions For II Puc Practical 2024 Dr. BSKelectrowaltxNoch keine Bewertungen
- Nafion ConductivityDokument9 SeitenNafion ConductivityAli Alipor NajmiNoch keine Bewertungen
- DNA Damage: Paul W DoetschDokument7 SeitenDNA Damage: Paul W Doetschmanoj_rkl_07Noch keine Bewertungen
- Dosimetry: Film Badge DosimetersDokument3 SeitenDosimetry: Film Badge DosimetersmahaNoch keine Bewertungen
- Heterogeneous Photocatalysis for Water TreatmentDokument57 SeitenHeterogeneous Photocatalysis for Water TreatmentVishal DhapaNoch keine Bewertungen
- Coordination CompoundDokument76 SeitenCoordination Compoundashok pradhanNoch keine Bewertungen
- Tutorial 8 (Chromatograms) Incl Answers - 73Dokument20 SeitenTutorial 8 (Chromatograms) Incl Answers - 73Pedro0% (1)
- Lippinocott's Q& ADokument195 SeitenLippinocott's Q& Ag_komolafe100% (1)
- Setup a Water Quality Model in MIKE SHEDokument32 SeitenSetup a Water Quality Model in MIKE SHEQecil GamingNoch keine Bewertungen
- Physical LimnologyDokument173 SeitenPhysical LimnologyJuan Pablo Ramirez MonsalveNoch keine Bewertungen
- Simpson's Index - Quantifying Biodiversity: John Osborne December 2021Dokument10 SeitenSimpson's Index - Quantifying Biodiversity: John Osborne December 2021johnosborneNoch keine Bewertungen
- Nuclear Heat TransferDokument14 SeitenNuclear Heat TransferDilip YadavNoch keine Bewertungen
- Lower Congo Basin 3D SurveyDokument2 SeitenLower Congo Basin 3D SurveyTalis TemNoch keine Bewertungen
- Lecture 6-Design For ShearDokument14 SeitenLecture 6-Design For ShearMarkos DanielNoch keine Bewertungen
- Vega Plus 69Dokument3 SeitenVega Plus 69yashNoch keine Bewertungen
- Individual Moving Range (I-MR) Charts ExplainedDokument18 SeitenIndividual Moving Range (I-MR) Charts ExplainedRam Ramanathan0% (1)
- SOP Questionnaire GREDokument4 SeitenSOP Questionnaire GREYuvraj GuptaNoch keine Bewertungen
- Chemistry 101 - The Complete Notes - Joliet Junior College (PDFDrive)Dokument226 SeitenChemistry 101 - The Complete Notes - Joliet Junior College (PDFDrive)Kabwela MwapeNoch keine Bewertungen
- Prelims in NSTPDokument2 SeitenPrelims in NSTPJanine Alexis TividadNoch keine Bewertungen
- The Eukaryotic Replication Machine: D. Zhang, M. O'DonnellDokument39 SeitenThe Eukaryotic Replication Machine: D. Zhang, M. O'DonnellÁgnes TóthNoch keine Bewertungen
- Sci9 Q4 Mod8.2Dokument24 SeitenSci9 Q4 Mod8.2John Christian RamosNoch keine Bewertungen
- Ethanol: Safety Data SheetDokument19 SeitenEthanol: Safety Data SheetNitika SinhaNoch keine Bewertungen
- Technology and Livelihood Education: Agri - Fishery Arts (Agricultural Crops Production) Marketing Agricultural ProductsDokument14 SeitenTechnology and Livelihood Education: Agri - Fishery Arts (Agricultural Crops Production) Marketing Agricultural Productslana del rey100% (1)
- Media Effects TheoriesDokument6 SeitenMedia Effects TheoriesHavie Joy SiguaNoch keine Bewertungen
- 2VAA001695 en S Control NTCS04 Controller Station Termination UnitDokument43 Seiten2VAA001695 en S Control NTCS04 Controller Station Termination UnitanbarasanNoch keine Bewertungen
- DANA 6800-1 Parts ManualDokument4 SeitenDANA 6800-1 Parts ManualDude manNoch keine Bewertungen
- Lab Report 1Dokument8 SeitenLab Report 1Hammad SattiNoch keine Bewertungen
- Critical Thinking Essay-Animal Testing: Rough DraftDokument10 SeitenCritical Thinking Essay-Animal Testing: Rough Draftjeremygcap2017Noch keine Bewertungen
- Empowerment Technology - Week 2Dokument3 SeitenEmpowerment Technology - Week 2yahgieNoch keine Bewertungen
- Amber ToolsDokument309 SeitenAmber ToolshkmydreamsNoch keine Bewertungen
- Mock DataDokument56 SeitenMock DataAnonymous O2bvbOuNoch keine Bewertungen
- Manufacturing Processes (ME361) Lecture 13: Instructor: Shantanu BhattacharyaDokument28 SeitenManufacturing Processes (ME361) Lecture 13: Instructor: Shantanu BhattacharyaSahil SundaNoch keine Bewertungen
- CHEE319 Tutorial 4 SolnDokument13 SeitenCHEE319 Tutorial 4 SolnyeshiduNoch keine Bewertungen