Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Reza Negarestani - Intelligence and Spirit-Urbanomic (2018) PDFDokument584 SeitenReza Negarestani - Intelligence and Spirit-Urbanomic (2018) PDFSantiago Reyes Villaveces67% (3)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Math10 q2 Week1 Module1 Polynomial-Functions For-ReproductionDokument32 SeitenMath10 q2 Week1 Module1 Polynomial-Functions For-ReproductionChaz grant borromeo89% (9)
- MP2 DDDokument30 SeitenMP2 DDabeck171344% (9)
- Prospects and Challenges For Developing Securities Markets in Ethiopia An Analytical ReviewDokument16 SeitenProspects and Challenges For Developing Securities Markets in Ethiopia An Analytical ReviewSinshaw Bekele100% (10)
- Weaver Recent Contributions To The Mathematical Theory of CommunicationDokument12 SeitenWeaver Recent Contributions To The Mathematical Theory of CommunicationSinshaw BekeleNoch keine Bewertungen
- A Novel Channel Estimation Algorithm For 3GPP LTE Downlink System Using Joint Time-Frequency Two-Dimensional Iterative Wiener FilterDokument4 SeitenA Novel Channel Estimation Algorithm For 3GPP LTE Downlink System Using Joint Time-Frequency Two-Dimensional Iterative Wiener FilterSinshaw BekeleNoch keine Bewertungen
- The Sphere Packing Problem, 1998 Shannon Lecture, N. J. A. SloaneDokument5 SeitenThe Sphere Packing Problem, 1998 Shannon Lecture, N. J. A. SloaneSinshaw BekeleNoch keine Bewertungen
- Design of Non-Binary Quasi-Cyclic LDPC Codes by ACE OptimizationDokument6 SeitenDesign of Non-Binary Quasi-Cyclic LDPC Codes by ACE OptimizationSinshaw BekeleNoch keine Bewertungen
- Bidirectional MMSE Algorithms For Interference Mitigation in CDMA Systems Over Fast Fading ChannelsDokument6 SeitenBidirectional MMSE Algorithms For Interference Mitigation in CDMA Systems Over Fast Fading ChannelsSinshaw BekeleNoch keine Bewertungen
- Embedded Joint Source-Channel Coding of Speech Using Symbol Puncturing of Trellis Codes - Bernard - Icassp99Dokument4 SeitenEmbedded Joint Source-Channel Coding of Speech Using Symbol Puncturing of Trellis Codes - Bernard - Icassp99Sinshaw BekeleNoch keine Bewertungen
- Performance Comparison of LDPC Codes and Turbo CodesDokument8 SeitenPerformance Comparison of LDPC Codes and Turbo CodesSinshaw BekeleNoch keine Bewertungen
- 1.0 CK-12-Math-Analysis B v1 5fm s1Dokument472 Seiten1.0 CK-12-Math-Analysis B v1 5fm s1Quamar NadimNoch keine Bewertungen
- B.Tech 3rd SemesterDokument18 SeitenB.Tech 3rd SemesterAdityaNoch keine Bewertungen
- CalculusDokument18 SeitenCalculusAntonio GandiaNoch keine Bewertungen
- A Rational Reconstruction of A System For Experimental MathematicsDokument14 SeitenA Rational Reconstruction of A System For Experimental MathematicsroseNoch keine Bewertungen
- Unit 3 Calculated and Restricted KEy FiguresDokument16 SeitenUnit 3 Calculated and Restricted KEy FiguresAshwin KumarNoch keine Bewertungen
- 11 Maths Relationandfunction Tp01Dokument6 Seiten11 Maths Relationandfunction Tp01MRS. VAISHALI ADHIK SAWANT ENoch keine Bewertungen
- General Mathematics Quarter 1: Week 4Dokument40 SeitenGeneral Mathematics Quarter 1: Week 4Mavros AngelusNoch keine Bewertungen
- PCS095 Manual PDFDokument106 SeitenPCS095 Manual PDFAuztim gutierrez reyesNoch keine Bewertungen
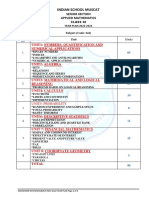
- 2022-2023 Class XI Applied Mathematics Year Plan (MONTHLY)Dokument3 Seiten2022-2023 Class XI Applied Mathematics Year Plan (MONTHLY)Kashish SabhnaniNoch keine Bewertungen
- A Class of Mixed Assumed Strain Methods and The Method of IncompatibleDokument45 SeitenA Class of Mixed Assumed Strain Methods and The Method of IncompatibleQiyuan ZhouNoch keine Bewertungen
- AP Calculus BC 2018 Free-Response Questions 4 and 5Dokument2 SeitenAP Calculus BC 2018 Free-Response Questions 4 and 5Nile FranzNoch keine Bewertungen
- Mathematics Tricks (2nd Edition) - 2 PDFDokument351 SeitenMathematics Tricks (2nd Edition) - 2 PDFRaHeeM BuTT100% (3)
- ML Cheat SheetDokument74 SeitenML Cheat SheetSasi sasi100% (1)
- 25.csec Maths June 2016Dokument49 Seiten25.csec Maths June 2016Gregory Lewis100% (1)
- BasicCalculus G11 Q4Mod4 Antiderivative-And-Reimann-IntegralDokument62 SeitenBasicCalculus G11 Q4Mod4 Antiderivative-And-Reimann-IntegralMARLA RUBY PAZ YTINGNoch keine Bewertungen
- 11 Analysis & Approaches SL Unit 6 - Applications of Differentiation 6.1 Increasing & Decreasing Functions (Ch. 5.4a)Dokument16 Seiten11 Analysis & Approaches SL Unit 6 - Applications of Differentiation 6.1 Increasing & Decreasing Functions (Ch. 5.4a)Ryan KantonoNoch keine Bewertungen
- Econometrics Lecture 01Dokument36 SeitenEconometrics Lecture 01Nayab MirzaNoch keine Bewertungen
- Maths Class Xi Chapter 02 Relations and Functions Practice Paper 02Dokument3 SeitenMaths Class Xi Chapter 02 Relations and Functions Practice Paper 02KavinNoch keine Bewertungen
- Math Sping Break PacketDokument10 SeitenMath Sping Break PacketKIPPNYCDocsNoch keine Bewertungen
- General Mathematics11 - Q1 - Module1Dokument31 SeitenGeneral Mathematics11 - Q1 - Module1julius100% (1)
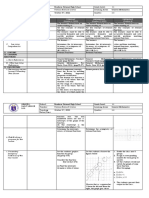
- DLL - Genmath Week 6Dokument7 SeitenDLL - Genmath Week 6Vanissa Bianca S. LlanosNoch keine Bewertungen
- Hive Part02 1682422243Dokument24 SeitenHive Part02 1682422243aashish soniNoch keine Bewertungen
- North South University (Nsu) : Department of Biochemistry & Microbiology (BMD)Dokument42 SeitenNorth South University (Nsu) : Department of Biochemistry & Microbiology (BMD)tpromee21Noch keine Bewertungen
- (Graduate Texts in Mathematics 103) Serge Lang-Complex Analysis-Springer (2003)Dokument504 Seiten(Graduate Texts in Mathematics 103) Serge Lang-Complex Analysis-Springer (2003)cxw100% (4)
- Gamma PDFDokument7 SeitenGamma PDFManjul RegmiNoch keine Bewertungen
- Lesson 8 - Implicit DifferentiationDokument3 SeitenLesson 8 - Implicit DifferentiationLewis PharmaceuticalsNoch keine Bewertungen
- Limits: Arride Learning Online E-Learning AcademyDokument24 SeitenLimits: Arride Learning Online E-Learning AcademySanagavarapu SubrahmanyamNoch keine Bewertungen