Das könnte Ihnen auch gefallen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Lec 17Dokument4 SeitenLec 17Naufal NabilNoch keine Bewertungen
- Math 257: Finite Difference MethodsDokument8 SeitenMath 257: Finite Difference MethodsSayan KarNoch keine Bewertungen
- 1 Finite-Difference Method For The 1D Heat Equation: 1.1 Domain DiscretizationDokument5 Seiten1 Finite-Difference Method For The 1D Heat Equation: 1.1 Domain Discretizationoverdose500Noch keine Bewertungen
- HeatDokument15 SeitenHeatParitosh Kumar VelalamNoch keine Bewertungen
- Advection Eqn Is UnstableDokument9 SeitenAdvection Eqn Is UnstableZakria ToorNoch keine Bewertungen
- Numerics Finite DifferencesDokument13 SeitenNumerics Finite DifferencesTareq DahbNoch keine Bewertungen
- Parabolic 4Dokument5 SeitenParabolic 4Sheba SYNoch keine Bewertungen
- Numerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RaveDokument44 SeitenNumerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RaveSanjeev DwivediNoch keine Bewertungen
- Final New Conduction in 2dDokument8 SeitenFinal New Conduction in 2dBharath SaiNoch keine Bewertungen
- 4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K XDokument19 Seiten4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K Xnayeem4444Noch keine Bewertungen
- Properties of Numerical MethodsDokument19 SeitenProperties of Numerical MethodsSsheshan PugazhendhiNoch keine Bewertungen
- Explicit Method For Solving Parabolic PDE: T L X Where X U C T UDokument9 SeitenExplicit Method For Solving Parabolic PDE: T L X Where X U C T UAshokNoch keine Bewertungen
- MATH3203 Lecture 5 Accuracy of Finite Difference Schemes: Dion WeatherleyDokument6 SeitenMATH3203 Lecture 5 Accuracy of Finite Difference Schemes: Dion WeatherleyhellofinNoch keine Bewertungen
- Diffusion StabilityDokument5 SeitenDiffusion StabilityasukamonteiroNoch keine Bewertungen
- Partial Differential Equations: Solution by Finite Difference MethodDokument34 SeitenPartial Differential Equations: Solution by Finite Difference Methodjyhk00Noch keine Bewertungen
- Finite Differerence Temp 2DDokument6 SeitenFinite Differerence Temp 2DOkan EryilmazNoch keine Bewertungen
- ECE 602 Solution To Homework Assignment 4Dokument7 SeitenECE 602 Solution To Homework Assignment 4souleyman hassanNoch keine Bewertungen
- Am 53Dokument11 SeitenAm 53Mikael Yuan EstuariwinarnoNoch keine Bewertungen
- Finite Difference Methods: MSC Course in Mathematics and Finance Imperial College London, 2010-11Dokument40 SeitenFinite Difference Methods: MSC Course in Mathematics and Finance Imperial College London, 2010-11Muhammad FahimNoch keine Bewertungen
- Numerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RaveDokument44 SeitenNumerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel Raveanirbanpwd76Noch keine Bewertungen
- Finite Differerence Temp 2DDokument6 SeitenFinite Differerence Temp 2DJib RanNoch keine Bewertungen
- Paul Summers Final Write UpDokument17 SeitenPaul Summers Final Write UpcartamenesNoch keine Bewertungen
- Implicit MethodDokument30 SeitenImplicit MethodshekhadaaNoch keine Bewertungen
- Finite Differerence IntroDokument5 SeitenFinite Differerence IntroFrancisco Rafael CerónNoch keine Bewertungen
- Chap 8Dokument17 SeitenChap 8Aryce_Noch keine Bewertungen
- Collocation Solutions of A Weakly Singular Volterra Integral EquationDokument10 SeitenCollocation Solutions of A Weakly Singular Volterra Integral EquationGaurav LathwalNoch keine Bewertungen
- Numerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RaveDokument44 SeitenNumerical Methods: Marisa Villano, Tom Fagan, Dave Fairburn, Chris Savino, David Goldberg, Daniel RavePrajwalNoch keine Bewertungen
- Brief Notes On Solving PDE's and Integral EquationsDokument11 SeitenBrief Notes On Solving PDE's and Integral Equations140557Noch keine Bewertungen
- Dupiere Discrete ModelDokument14 SeitenDupiere Discrete Modelabhiu1991Noch keine Bewertungen
- A Differential Equation For Modeling Nesterov'sDokument18 SeitenA Differential Equation For Modeling Nesterov'sRest TabernacleNoch keine Bewertungen
- Simple Quadrature For Singular Integral Equations With Variable Coe CientsDokument20 SeitenSimple Quadrature For Singular Integral Equations With Variable Coe CientsGloomsyNoch keine Bewertungen
- Numerical Solution To PDEsDokument8 SeitenNumerical Solution To PDEsZohaib AltafNoch keine Bewertungen
- Finite Differerence Timpl ExplDokument4 SeitenFinite Differerence Timpl Explkinfolk321Noch keine Bewertungen
- Document Hw4Dokument12 SeitenDocument Hw4kalyan.427656Noch keine Bewertungen
- Concourse 18.03 - Lecture #4: D D D DT DT DTDokument4 SeitenConcourse 18.03 - Lecture #4: D D D DT DT DTAna Petrovic TomicNoch keine Bewertungen
- Problem Set FD 2dheatDokument9 SeitenProblem Set FD 2dheatossomansNoch keine Bewertungen
- A Comment On Methods To Deal With Divergent Series and IntegralsDokument14 SeitenA Comment On Methods To Deal With Divergent Series and Integralseljose1234100% (2)
- Finite Differences Partial Differential EquationsDokument15 SeitenFinite Differences Partial Differential EquationsJuanCarlos Arias SantanaNoch keine Bewertungen
- Chapter 2 Numerical Methods For Stiff Ordinary Differential EquationsDokument21 SeitenChapter 2 Numerical Methods For Stiff Ordinary Differential EquationsRamoni Z. S. AzevedoNoch keine Bewertungen
- CordicDokument8 SeitenCordicChinni MshNoch keine Bewertungen
- 1 Crank-Nicholson Algorithm: Übungen Zur Computational Nanoscience Blatt 5Dokument4 Seiten1 Crank-Nicholson Algorithm: Übungen Zur Computational Nanoscience Blatt 5140557Noch keine Bewertungen
- (V) ParabolicDokument21 Seiten(V) ParabolicM Haroon SheikhNoch keine Bewertungen
- 5.3 The Wave Equation and Staggered Leapfrog: C 2006 Gilbert StrangDokument11 Seiten5.3 The Wave Equation and Staggered Leapfrog: C 2006 Gilbert StrangEfstathios SiampisNoch keine Bewertungen
- Applied Mathematics and Computation: Yun Yan, Frederick Ira Moxley III, Weizhong DaiDokument19 SeitenApplied Mathematics and Computation: Yun Yan, Frederick Ira Moxley III, Weizhong DailunejleNoch keine Bewertungen
- Parabolic Pdes - Explicit Method: Heat Flow and DiffusionDokument5 SeitenParabolic Pdes - Explicit Method: Heat Flow and DiffusionjirihavNoch keine Bewertungen
- Math54 Teleman Final 2011spring SolnDokument3 SeitenMath54 Teleman Final 2011spring SolntehkronosNoch keine Bewertungen
- Finite Difference Solution of The Heat Equation: Adam PowellDokument6 SeitenFinite Difference Solution of The Heat Equation: Adam PowellnitsilcharassamNoch keine Bewertungen
- Problem Set 6: n+1 N n+1 N 1 NDokument6 SeitenProblem Set 6: n+1 N n+1 N 1 NanthalyaNoch keine Bewertungen
- American Mathematical SocietyDokument20 SeitenAmerican Mathematical SocietyAndrea MaroniNoch keine Bewertungen
- Nbody DissipativeDokument44 SeitenNbody DissipativeFulana SchlemihlNoch keine Bewertungen
- Solution of Question No. 1Dokument6 SeitenSolution of Question No. 1shaheer mustafaNoch keine Bewertungen
- The Normal and Lognormal Distributions: John NorstadDokument14 SeitenThe Normal and Lognormal Distributions: John NorstadkalichkoNoch keine Bewertungen
- Lognormal and Normal DistributionsDokument14 SeitenLognormal and Normal DistributionsKam Fong ChanNoch keine Bewertungen
- Local Bifurcations of Nonlinear Hybrid SystemsDokument4 SeitenLocal Bifurcations of Nonlinear Hybrid SystemsmenguemengueNoch keine Bewertungen
- HW 1.2 SolutionsDokument6 SeitenHW 1.2 SolutionsArini MelanieNoch keine Bewertungen
- Computer Algorithms For Solving The SCHR Odinger and Poisson EquationsDokument9 SeitenComputer Algorithms For Solving The SCHR Odinger and Poisson EquationsJoyee BasuNoch keine Bewertungen
- 09 Aop456Dokument29 Seiten09 Aop456walter huNoch keine Bewertungen
- 1013 1877 1 SMDokument7 Seiten1013 1877 1 SMAgus Hendri WahyudiNoch keine Bewertungen
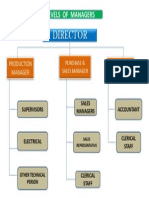
- Director: Levels of ManagersDokument1 SeiteDirector: Levels of ManagersAnimesh SahaNoch keine Bewertungen
- Dsoop (Co 221) - 1Dokument20 SeitenDsoop (Co 221) - 1Animesh SahaNoch keine Bewertungen
- Prospectus 2013Dokument140 SeitenProspectus 2013Animesh SahaNoch keine Bewertungen
- Invariants of Characteristics of Some Systems of Partial Differential EquationsDokument13 SeitenInvariants of Characteristics of Some Systems of Partial Differential EquationsAnimesh SahaNoch keine Bewertungen
- Tabela InfoDokument7 SeitenTabela InfomamutecuritibaNoch keine Bewertungen
- TAFJ-AS JBossInstall v5.2 EAP PDFDokument33 SeitenTAFJ-AS JBossInstall v5.2 EAP PDFrameshNoch keine Bewertungen
- Digital Tachometer: 3.1 Component DetailsDokument12 SeitenDigital Tachometer: 3.1 Component DetailsVipin Kumar SharmaNoch keine Bewertungen
- RANE SL 1 ManualDokument40 SeitenRANE SL 1 Manualmohamad_moza0% (1)
- Din 267-24 PDFDokument7 SeitenDin 267-24 PDFLuciano FontesNoch keine Bewertungen
- Veranda StepsDokument2 SeitenVeranda StepsFe TusNoch keine Bewertungen
- Intel 8085 Microprocessor ArchitectureDokument2 SeitenIntel 8085 Microprocessor ArchitectureipoonamNoch keine Bewertungen
- Hardware ThundermatchDokument2 SeitenHardware ThundermatchAbdulhadi WahidNoch keine Bewertungen
- Sun Blade 6000 Disk Module - Admin GuideDokument152 SeitenSun Blade 6000 Disk Module - Admin GuideramarnehNoch keine Bewertungen
- SAP HCM - Concepts of Central Person and Steps To Follow in Case If All The Personnel Assignments For A Personnel Number Are Not Shown in PA30Dokument7 SeitenSAP HCM - Concepts of Central Person and Steps To Follow in Case If All The Personnel Assignments For A Personnel Number Are Not Shown in PA30sainath89Noch keine Bewertungen
- 02 - BIF 506 (I O Devices)Dokument36 Seiten02 - BIF 506 (I O Devices)Neeru RedhuNoch keine Bewertungen
- Introduction To Distributed Computing SystemDokument75 SeitenIntroduction To Distributed Computing SystemSumadhurNoch keine Bewertungen
- PICkit 3 Poster 51792aDokument1 SeitePICkit 3 Poster 51792aEugenio Morocho CayamcelaNoch keine Bewertungen
- CIS Apple macOS 10.13 Benchmark v1.0.0 PDFDokument196 SeitenCIS Apple macOS 10.13 Benchmark v1.0.0 PDFJohn DavisonNoch keine Bewertungen
- Nine Components of Mission Statement: Mohamed Adib Nazim Bin Mohd Yusoff AP160521Dokument3 SeitenNine Components of Mission Statement: Mohamed Adib Nazim Bin Mohd Yusoff AP160521Adib NazimNoch keine Bewertungen
- LG W1941SDokument39 SeitenLG W1941SGunvant K. BhopleNoch keine Bewertungen
- Berna 2Dokument23 SeitenBerna 2ScappinNoch keine Bewertungen
- Dcs 500 PDFDokument49 SeitenDcs 500 PDFalicardozoNoch keine Bewertungen
- Samsung Hlr4264wx Xac Chassis l62bDokument81 SeitenSamsung Hlr4264wx Xac Chassis l62bDaniboy1994Noch keine Bewertungen
- An Introduction To The Digital Protection of Power Systems - HarbawiDokument163 SeitenAn Introduction To The Digital Protection of Power Systems - HarbawiWalber MoraisNoch keine Bewertungen
- PilotadasDokument33 SeitenPilotadasKerry DillonNoch keine Bewertungen
- kvdr29m31 PDFDokument229 Seitenkvdr29m31 PDFJamNoch keine Bewertungen
- PrintForm ComponentDokument13 SeitenPrintForm ComponentNasim KhanNoch keine Bewertungen
- Adesto At25sf041Dokument47 SeitenAdesto At25sf041Joseph Abou El OulaNoch keine Bewertungen
- Select A Location Under The Keyboard Shelf Where The Control Is To Be MountedDokument7 SeitenSelect A Location Under The Keyboard Shelf Where The Control Is To Be MountedRichard UrbanNoch keine Bewertungen
- Running WeavingDokument50 SeitenRunning WeavingEti ChiranjeeviNoch keine Bewertungen
- Codesys Opc Server v3 User GuideDokument40 SeitenCodesys Opc Server v3 User Guidebagyi111Noch keine Bewertungen
- Manual Variador TECODokument115 SeitenManual Variador TECOEduardoCastillo100% (1)
- Introduction To Information and Communication TechnologiesDokument1 SeiteIntroduction To Information and Communication Technologiesbitf12 a524Noch keine Bewertungen
- hcf4060 PDFDokument10 Seitenhcf4060 PDFdzaki55Noch keine Bewertungen