Das könnte Ihnen auch gefallen
- 1 Lecture Block Diagram Representation of Control SystemsDokument65 Seiten1 Lecture Block Diagram Representation of Control SystemsSuyash Dahake VlogsNoch keine Bewertungen
- BlockDiagram and Signal Flow GraphsDokument29 SeitenBlockDiagram and Signal Flow GraphsDienies TorresNoch keine Bewertungen
- Final Examination Control SystemsDokument32 SeitenFinal Examination Control SystemsJohn Manuel BautistaNoch keine Bewertungen
- 003 ME31002 - Block Diagram-2021febDokument54 Seiten003 ME31002 - Block Diagram-2021febShek Yu LaiNoch keine Bewertungen
- Chapter 10Dokument93 SeitenChapter 10Carraan Dandeettirra Caala Altakkatakka100% (1)
- Lab # 8 Control SystemDokument10 SeitenLab # 8 Control SystemZabeehullahmiakhailNoch keine Bewertungen
- Zahra AbdulHameed ShukrDokument11 SeitenZahra AbdulHameed ShukrTana AzeezNoch keine Bewertungen
- Syafruddin Hasan: Contact No.: 0823 6487 9588 E-Mail: Syafruddin7@usu - Ac.idDokument34 SeitenSyafruddin Hasan: Contact No.: 0823 6487 9588 E-Mail: Syafruddin7@usu - Ac.idAyu Kartika ManikNoch keine Bewertungen
- CSEXP2Dokument15 SeitenCSEXP2Kavita DhamalNoch keine Bewertungen
- Lec 45Dokument73 SeitenLec 45api-247714257Noch keine Bewertungen
- Block Diagrams EnotesDokument7 SeitenBlock Diagrams Enotespatel_vicky87Noch keine Bewertungen
- Lecture 4Dokument13 SeitenLecture 4Syed Hussain Akbar MosviNoch keine Bewertungen
- 96 Feedback and Stability TheoryDokument18 Seiten96 Feedback and Stability TheoryJohnny DoeNoch keine Bewertungen
- Lab # 8 SolvedDokument10 SeitenLab # 8 SolvedZabeehullahmiakhailNoch keine Bewertungen
- JUNE 2013 Solved Question Paper: 1 A: Compare Open Loop and Closed Loop Control Systems and Give Jun. 2013, 6 MarksDokument40 SeitenJUNE 2013 Solved Question Paper: 1 A: Compare Open Loop and Closed Loop Control Systems and Give Jun. 2013, 6 MarksmanjulaNoch keine Bewertungen
- Lecture-7 Block Diagram Representation of Control SystemsDokument41 SeitenLecture-7 Block Diagram Representation of Control Systemsusama asifNoch keine Bewertungen
- Process Dynamics and Control (Cheg4183) : By: Chirotaw GDokument38 SeitenProcess Dynamics and Control (Cheg4183) : By: Chirotaw GAbdi Bekele WakoNoch keine Bewertungen
- MSD2Dokument47 SeitenMSD2moeNoch keine Bewertungen
- Lecture 2-Block Diagram Reduction TechniquesDokument71 SeitenLecture 2-Block Diagram Reduction TechniquesNoor AhmedNoch keine Bewertungen
- Stability of Control Systems Important Points: CHC3150 Process Dynamics and ControlDokument10 SeitenStability of Control Systems Important Points: CHC3150 Process Dynamics and ControlOseribho ObohNoch keine Bewertungen
- MDPN372 PS4 Spring 2021Dokument5 SeitenMDPN372 PS4 Spring 2021akhbar elyoum academyNoch keine Bewertungen
- Lecture 2Dokument14 SeitenLecture 2Abdullah Mohammed AlsaadouniNoch keine Bewertungen
- EEN 407 Sample QuestionsDokument41 SeitenEEN 407 Sample QuestionsAbu SiddiqueNoch keine Bewertungen
- Classical Control RevisionDokument7 SeitenClassical Control RevisionwolverinepNoch keine Bewertungen
- Control Systems Group Project 2Dokument3 SeitenControl Systems Group Project 2Yu-Yun ChangNoch keine Bewertungen
- Block DiagramDokument75 SeitenBlock DiagramJane Erestain BuenaobraNoch keine Bewertungen
- Proportional and Derivative Control DesignDokument5 SeitenProportional and Derivative Control Designahmed shahNoch keine Bewertungen
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDokument14 SeitenELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNoch keine Bewertungen
- Design Problem Matlab Project TFDokument19 SeitenDesign Problem Matlab Project TFhumayun azizNoch keine Bewertungen
- Lab 06Dokument7 SeitenLab 06Andy MeyerNoch keine Bewertungen
- NEWLab1 Servo2 v5 LabManualDokument9 SeitenNEWLab1 Servo2 v5 LabManualkrups1991Noch keine Bewertungen
- Control Systems Questions and Answers - Signal Flow GraphsDokument5 SeitenControl Systems Questions and Answers - Signal Flow Graphsحسن علي جاسمNoch keine Bewertungen
- 1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Dokument25 Seiten1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Md.Atikur RahmanNoch keine Bewertungen
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDokument14 SeitenELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNoch keine Bewertungen
- Higher National Diploma in Engineering: Assessment BriefDokument22 SeitenHigher National Diploma in Engineering: Assessment BriefTân NguyễnNoch keine Bewertungen
- Control SystemsDokument32 SeitenControl Systemsselvi0412100% (1)
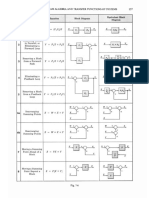
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDokument6 SeitenCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNoch keine Bewertungen
- Block Diagrams Reduction PDFDokument7 SeitenBlock Diagrams Reduction PDFSheroz Rajab Ali SoomroNoch keine Bewertungen
- Block Diagrams ReductionDokument7 SeitenBlock Diagrams ReductionDipesh Kumar MishraNoch keine Bewertungen
- School of Engineering, Rmit UniversityDokument3 SeitenSchool of Engineering, Rmit UniversityDhavalRavalNoch keine Bewertungen
- Block Diagram ReductionDokument14 SeitenBlock Diagram ReductionJamal Mesidor100% (2)
- Session F4H: Block Diagram in Undergraduate Engineering Courses Other Than Control SystemsDokument5 SeitenSession F4H: Block Diagram in Undergraduate Engineering Courses Other Than Control SystemsmailmadoNoch keine Bewertungen
- Control ReportDokument15 SeitenControl ReportKenshow Large50% (2)
- Lab #2: PI Controller Design and Second Order SystemsDokument4 SeitenLab #2: PI Controller Design and Second Order SystemssamielmadssiaNoch keine Bewertungen
- C.S Unit - 2Dokument22 SeitenC.S Unit - 2Rajendar PonagantiNoch keine Bewertungen
- Assignment 1 - Block Diagrams and MatlabSimulinkDokument6 SeitenAssignment 1 - Block Diagrams and MatlabSimulinkdavidmeszNoch keine Bewertungen
- Sub. Name: Ae6505 Control Engineering Answer Key Semester/Year: V / Iii Cat-1 Part-ADokument12 SeitenSub. Name: Ae6505 Control Engineering Answer Key Semester/Year: V / Iii Cat-1 Part-AgallantprakashNoch keine Bewertungen
- Final Exam Version A-1Dokument2 SeitenFinal Exam Version A-1ahmedabdulkarim554Noch keine Bewertungen
- Design ControllerDokument34 SeitenDesign ControllerMaezinha_MarinelaNoch keine Bewertungen
- Final Exam Version ADokument2 SeitenFinal Exam Version Aahmedabdulkarim554Noch keine Bewertungen
- Old Question Paper Control SystemsDokument7 SeitenOld Question Paper Control SystemsSatendra KushwahaNoch keine Bewertungen
- R(S) C(S) : 0708sem1 - FinalexamDokument27 SeitenR(S) C(S) : 0708sem1 - FinalexamAmiruddin Mohd ArifuddinNoch keine Bewertungen
- Activity01 (1) CarreonDokument14 SeitenActivity01 (1) CarreonHaja Kiev Erenz CarreonNoch keine Bewertungen
- NI Tutorial 6450 enDokument11 SeitenNI Tutorial 6450 enAkhil GuptaNoch keine Bewertungen
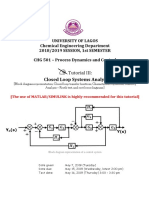
- Closed Loop Systems AnalysisDokument7 SeitenClosed Loop Systems AnalysisvictorNoch keine Bewertungen
- Control Systems Theory: Introduction To Block DiagramDokument47 SeitenControl Systems Theory: Introduction To Block DiagramFadly ShafiqNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Analog Automation and Digital Feedback Control TechniquesVon EverandAnalog Automation and Digital Feedback Control TechniquesNoch keine Bewertungen
- Electronic Systems: Study Topics in Physics Book 8Von EverandElectronic Systems: Study Topics in Physics Book 8Bewertung: 5 von 5 Sternen5/5 (1)
- MICRONE Nanjing Micro One Elec ME6213C33M5G - C236666Dokument10 SeitenMICRONE Nanjing Micro One Elec ME6213C33M5G - C236666João CavacoNoch keine Bewertungen
- EE6004Dokument58 SeitenEE6004Anonymous DAjfj9HIBmNoch keine Bewertungen
- CS-301 Computer Systems: Course GoalsDokument7 SeitenCS-301 Computer Systems: Course Goalsshumaila akramNoch keine Bewertungen
- Programming of MicroprocessorDokument9 SeitenProgramming of Microprocessorrishabh125Noch keine Bewertungen
- Speed Control of DC Motor Using PWMDokument8 SeitenSpeed Control of DC Motor Using PWMsunny kumarNoch keine Bewertungen
- 5040 Tally Passbook PrinterDokument4 Seiten5040 Tally Passbook PrinterReki BudimanNoch keine Bewertungen
- Ec8691 Microprocessors and Microcontrollers LTPC3003 ObjectivesDokument2 SeitenEc8691 Microprocessors and Microcontrollers LTPC3003 ObjectivesAlwynNoch keine Bewertungen
- Guide To Installation & Operations: Swivel Mount Personal Viewing Monitor Model #: Ai-56X-Swx (-Map)Dokument15 SeitenGuide To Installation & Operations: Swivel Mount Personal Viewing Monitor Model #: Ai-56X-Swx (-Map)Jaime ArroyoNoch keine Bewertungen
- BPHEL 144 (English)Dokument96 SeitenBPHEL 144 (English)JIJOMON O RNoch keine Bewertungen
- ADuM4160 USB IsolatorDokument16 SeitenADuM4160 USB Isolatoryo2ldkNoch keine Bewertungen
- PSP - Slides CH # 1 (Introdution To Protective Relaying)Dokument47 SeitenPSP - Slides CH # 1 (Introdution To Protective Relaying)ejazabdurrehmanNoch keine Bewertungen
- A Four Electrode BIOZ Physio Measur 2013Dokument16 SeitenA Four Electrode BIOZ Physio Measur 2013Humaira ZulkifliNoch keine Bewertungen
- 8030A OpmanDokument32 Seiten8030A Opmanleonardo arangurenNoch keine Bewertungen
- Opn 2002Dokument2 SeitenOpn 2002Marcelo Hidalgo C.Noch keine Bewertungen
- Acer Aspire 3050 Quanta ZR3 Laptop Schematics PDFDokument31 SeitenAcer Aspire 3050 Quanta ZR3 Laptop Schematics PDFMaxmílian CostaNoch keine Bewertungen
- Unit 2 MCQDokument20 SeitenUnit 2 MCQanand anithaNoch keine Bewertungen
- Product Service Manual - Level Ii: Service Manual For Benq: Gw2760Hs P/N: 9H.L9Nlb - QB Applicable For All RegionsDokument59 SeitenProduct Service Manual - Level Ii: Service Manual For Benq: Gw2760Hs P/N: 9H.L9Nlb - QB Applicable For All Regionseisovic8Noch keine Bewertungen
- On PLCC Carier CommunicationDokument4 SeitenOn PLCC Carier CommunicationDipak Kumar PatelNoch keine Bewertungen
- Beckhoff - CX9020 (2016)Dokument50 SeitenBeckhoff - CX9020 (2016)Jorge_Andril_5370100% (1)
- XII Physics Chapter 7 - Alternating Current Saju HssliveDokument10 SeitenXII Physics Chapter 7 - Alternating Current Saju HssliveVikash SharmaNoch keine Bewertungen
- Casa Systems Advantech Intel and Wind River - Virtual Mobile Security at The Network EdgeDokument5 SeitenCasa Systems Advantech Intel and Wind River - Virtual Mobile Security at The Network EdgeoskcarrasquiNoch keine Bewertungen
- Eric Bogatin - Practical Transmission Line Design and Measurement - Lossless Single-Ended Transmission Lines-Artech House (2020)Dokument604 SeitenEric Bogatin - Practical Transmission Line Design and Measurement - Lossless Single-Ended Transmission Lines-Artech House (2020)Fernando RubioNoch keine Bewertungen
- Grade 03 ICTDokument3 SeitenGrade 03 ICTcsujithanNoch keine Bewertungen
- Service Manual FSH3-TVDokument71 SeitenService Manual FSH3-TVArmamndo RamirezNoch keine Bewertungen
- AltimeterModule v1.0Dokument5 SeitenAltimeterModule v1.0Ezza Yang Mana LagiNoch keine Bewertungen
- TL431 TL432: Programmable Voltage ReferenceDokument21 SeitenTL431 TL432: Programmable Voltage ReferenceΚΩΝΣΤΑΝΤΙΝΟΣ ΚΟΝΤΟΜΙΣΙΟΣNoch keine Bewertungen
- Parallel Terminology 2Dokument7 SeitenParallel Terminology 2maxsen021Noch keine Bewertungen
- Nov P/N Yaskawa P/N Description Inter-Co Cost 60RJDokument4 SeitenNov P/N Yaskawa P/N Description Inter-Co Cost 60RJRicardo VillarNoch keine Bewertungen
- Determining Beta Factor For A 2N2222 TransistorDokument2 SeitenDetermining Beta Factor For A 2N2222 TransistorJuan Carlos Morales ParraNoch keine Bewertungen
- TYWE3S Module Datasheet - Tuya Smart - DocumentationDokument26 SeitenTYWE3S Module Datasheet - Tuya Smart - DocumentationNguyễn TuấnNoch keine Bewertungen