Das könnte Ihnen auch gefallen
- PID Tuning Using Extremum SeekingDokument10 SeitenPID Tuning Using Extremum Seekinggautam28461Noch keine Bewertungen
- Probably The Best Simple PID Tuning Rules in The World: Sigurd SkogestadDokument28 SeitenProbably The Best Simple PID Tuning Rules in The World: Sigurd SkogestadMohamed RezkNoch keine Bewertungen
- Auto-Tuning of PID Controllers Via Extremum SeekingDokument6 SeitenAuto-Tuning of PID Controllers Via Extremum SeekingjuliiojaiimesNoch keine Bewertungen
- CHNG 3003 Assign4 2007Dokument9 SeitenCHNG 3003 Assign4 2007Nguyễn Tiến DũngNoch keine Bewertungen
- PID Control System Analysis & DesignDokument10 SeitenPID Control System Analysis & DesignFeridinand Thainis100% (1)
- Tune PID Controller Using Ziegler-Nichols & Cohen-Coon MethodsDokument5 SeitenTune PID Controller Using Ziegler-Nichols & Cohen-Coon MethodsUtkarsh SinghNoch keine Bewertungen
- Pid Control ch8 PDFDokument22 SeitenPid Control ch8 PDFGholamreza IlkhaniNoch keine Bewertungen
- Processcontrol Topic13 PidtuningDokument15 SeitenProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- 4.9 PID Tuning When Process Dynamics Varies: (End of Example 4.6)Dokument13 Seiten4.9 PID Tuning When Process Dynamics Varies: (End of Example 4.6)Marcelo MatosNoch keine Bewertungen
- Finn Haugen - Basic Dynamics - CH 010 - Tuning PID - Skogestad's Method - Integrator Processes - CA6B81DDd01Dokument27 SeitenFinn Haugen - Basic Dynamics - CH 010 - Tuning PID - Skogestad's Method - Integrator Processes - CA6B81DDd01Larissa CarolineNoch keine Bewertungen
- Tuning Fuzzy PIDDokument22 SeitenTuning Fuzzy PIDGoegoes Dwi NNoch keine Bewertungen
- Smith PredictorDokument2 SeitenSmith Predictortimus6778Noch keine Bewertungen
- PID ControllerDokument13 SeitenPID Controllerdar20092010Noch keine Bewertungen
- Chapter 10 PID 1Dokument36 SeitenChapter 10 PID 1Taufiq GalangNoch keine Bewertungen
- Implementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesDokument8 SeitenImplementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesIngole DeepakNoch keine Bewertungen
- The Design of Feedback Control SystemsDokument36 SeitenThe Design of Feedback Control SystemsNirmal Kumar PandeyNoch keine Bewertungen
- Direct Synthesis Method - Based Controller Design For Cold Rolling MillDokument8 SeitenDirect Synthesis Method - Based Controller Design For Cold Rolling MillAriel Alejo BlancoNoch keine Bewertungen
- Closed-Loop PI/PID Controller Tuning For Stable and Unstable ProcessesDokument6 SeitenClosed-Loop PI/PID Controller Tuning For Stable and Unstable ProcessesShamsMohdNoch keine Bewertungen
- Performance Assessment and Retuning of PID Controllers For Load Disturbance RejectionDokument6 SeitenPerformance Assessment and Retuning of PID Controllers For Load Disturbance RejectionAnonymous WkbmWCa8MNoch keine Bewertungen
- PID Control System Analysis and DesignDokument10 SeitenPID Control System Analysis and DesignSandro MoreroNoch keine Bewertungen
- Ta Proj 1 ReportlDokument12 SeitenTa Proj 1 ReportlshaheerdurraniNoch keine Bewertungen
- Partially Supported by Funda C Ao para A Ci Encia e A Tec-Nologia, Grant SFRH/BPD/20636/2004, Funded by POCI 2010, POS C, FSE and MCTESDokument6 SeitenPartially Supported by Funda C Ao para A Ci Encia e A Tec-Nologia, Grant SFRH/BPD/20636/2004, Funded by POCI 2010, POS C, FSE and MCTESVigneshRamakrishnanNoch keine Bewertungen
- Make It Easier For Other People To Find Your Content by Providing More Information About It.Dokument45 SeitenMake It Easier For Other People To Find Your Content by Providing More Information About It.Osy OsyNoch keine Bewertungen
- Controller Design Based On Transient Response CriteriaDokument45 SeitenController Design Based On Transient Response CriteriaVijay RajaindranNoch keine Bewertungen
- SIMC PI Tuning Rules: CG G y Y+ D 1+cg 1+cgDokument2 SeitenSIMC PI Tuning Rules: CG G y Y+ D 1+cg 1+cgNuraddeen MagajiNoch keine Bewertungen
- Tuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesDokument4 SeitenTuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesRicardo CampanaNoch keine Bewertungen
- Lab Experiment # 05 Demonstration of PID Controller using MATLABDokument7 SeitenLab Experiment # 05 Demonstration of PID Controller using MATLABMuhammad Samee baigNoch keine Bewertungen
- MATLAB - Programs On Control SystemDokument16 SeitenMATLAB - Programs On Control SystemJay MehtaNoch keine Bewertungen
- Introduction To PIDDokument16 SeitenIntroduction To PIDjocianvefNoch keine Bewertungen
- L-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlDokument10 SeitenL-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlRaymond EsmeraldaNoch keine Bewertungen
- Ziegler-Nichols PID Tuning Rules ExplainedDokument5 SeitenZiegler-Nichols PID Tuning Rules Explainedزهراء عادل عبد الزهرة إسماعيلNoch keine Bewertungen
- Real Time Temperature Control of Oven Using Matlab-SIMULINKDokument6 SeitenReal Time Temperature Control of Oven Using Matlab-SIMULINKStudio gx contactNoch keine Bewertungen
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDokument4 SeitenRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsNoch keine Bewertungen
- Self-Tuning of Fuzzy Logic Controllers in Cascade LoopsDokument8 SeitenSelf-Tuning of Fuzzy Logic Controllers in Cascade LoopsCarlos BellatinNoch keine Bewertungen
- Relaxed ZN Tuning of PI ControllersDokument15 SeitenRelaxed ZN Tuning of PI ControllersAkhilesh Kumar MishraNoch keine Bewertungen
- Figure 1: Air-Fuel Path (1) : Is TheDokument6 SeitenFigure 1: Air-Fuel Path (1) : Is Thesopnashree jenaNoch keine Bewertungen
- Experiment 9Dokument9 SeitenExperiment 9Ali AhmadNoch keine Bewertungen
- Tuning PI Controllers For Integrator/Dead Time ProcessesDokument4 SeitenTuning PI Controllers For Integrator/Dead Time ProcessesRaadBassamNoch keine Bewertungen
- 10 1 1 623 275 PDFDokument28 Seiten10 1 1 623 275 PDFDamir MiletaNoch keine Bewertungen
- 10 1 1 148 5914 PDFDokument4 Seiten10 1 1 148 5914 PDFlojain centerNoch keine Bewertungen
- Pid TuningDokument19 SeitenPid TuningAsuh Rifqi Prihandana100% (1)
- PID Controller Tuning Relations for Process Control SystemsDokument15 SeitenPID Controller Tuning Relations for Process Control Systemsl7aniNoch keine Bewertungen
- Matlab Project Controller DesignDokument3 SeitenMatlab Project Controller DesignSayed AbdullahNoch keine Bewertungen
- Math 5Dokument37 SeitenMath 5Anonymous UrzdtCB0INoch keine Bewertungen
- FUZZY BASED CONTROLLER FOR HEAVY DUTY GAS TURBINEDokument5 SeitenFUZZY BASED CONTROLLER FOR HEAVY DUTY GAS TURBINERichard CleeNoch keine Bewertungen
- Closed-loop auto relay tuning - auto tune variation, ATVDokument10 SeitenClosed-loop auto relay tuning - auto tune variation, ATVw_sallumNoch keine Bewertungen
- Comparative Study of Monotonic and Non-Monotonic Phase LTI Systems Using Improved Analytical PID ControllerDokument7 SeitenComparative Study of Monotonic and Non-Monotonic Phase LTI Systems Using Improved Analytical PID ControllerIOSRjournalNoch keine Bewertungen
- Auto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDokument4 SeitenAuto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDavid DebonoNoch keine Bewertungen
- Pid ControllerDokument27 SeitenPid ControllerAngel AngeleyeNoch keine Bewertungen
- Automatic Tuning of Pid Controller Using Fuzzy LogicDokument8 SeitenAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNoch keine Bewertungen
- Lab 6 LCS 078Dokument13 SeitenLab 6 LCS 078Asad saeedNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityVon EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNoch keine Bewertungen
- Analog Automation and Digital Feedback Control TechniquesVon EverandAnalog Automation and Digital Feedback Control TechniquesNoch keine Bewertungen
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportVon EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNoch keine Bewertungen
- Distributed Model Predictive Control for Plant-Wide SystemsVon EverandDistributed Model Predictive Control for Plant-Wide SystemsNoch keine Bewertungen
- C2-RS232-RS422-RS485-phan 3Dokument25 SeitenC2-RS232-RS422-RS485-phan 3Duc Tri Bui100% (2)
- Spi Chuong 5 Compatibility ModeDokument24 SeitenSpi Chuong 5 Compatibility ModeDuc Tri Bui100% (2)
- RS 485 - IntroductionDokument17 SeitenRS 485 - IntroductionPhạm Quốc Dũng100% (1)
- Gamma RobotDokument2 SeitenGamma RobotDuc Tri BuiNoch keine Bewertungen
- MPLAB Va Lap Trinh CDokument220 SeitenMPLAB Va Lap Trinh Cvanducdt7Noch keine Bewertungen
- PIC 16f877a Data SheetDokument234 SeitenPIC 16f877a Data Sheetanon-26401438% (8)
- Tong Hop Cac Ham Trong C++Dokument6 SeitenTong Hop Cac Ham Trong C++Nguyễn MạnhNoch keine Bewertungen
- Angle DebugDokument1 SeiteAngle DebugDuc Tri BuiNoch keine Bewertungen
- Axioms Are Objects, Too - Ontology Engineering Beyond The Modeling of Concepts and RelationsDokument16 SeitenAxioms Are Objects, Too - Ontology Engineering Beyond The Modeling of Concepts and RelationsJose Marcelo SchiesslNoch keine Bewertungen
- KatalogDokument732 SeitenKatalogNebulle WebDesignNoch keine Bewertungen
- QuimicaDokument2 SeitenQuimicaSILVIA FERNANDA ALDANA CASTELLANOSNoch keine Bewertungen
- ProPath Selected As Medical Director For Baylor Scott & White Medical Center - SunnyvaleDokument3 SeitenProPath Selected As Medical Director For Baylor Scott & White Medical Center - SunnyvalePR.comNoch keine Bewertungen
- Development Information: KEB Info Specifications of The HSP5-InterfaceDokument3 SeitenDevelopment Information: KEB Info Specifications of The HSP5-Interfacewaqasasad408Noch keine Bewertungen
- 30 SUMITA-SINHA Political-ScienceDokument13 Seiten30 SUMITA-SINHA Political-ScienceNicole OliverNoch keine Bewertungen
- 1 IE6700 Syllabus Fall 2021 - 01Dokument5 Seiten1 IE6700 Syllabus Fall 2021 - 01Ashok ThiruvengadamNoch keine Bewertungen
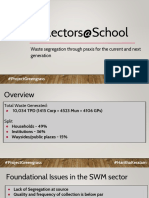
- Collectors@School Waste Segregation ProgramDokument12 SeitenCollectors@School Waste Segregation ProgramMir ANoch keine Bewertungen
- Application of Electro PneumaticsDokument2 SeitenApplication of Electro PneumaticsMaribel C. MagbanuaNoch keine Bewertungen
- Health Safety Environment & SD Specification For Ionising RadiationDokument40 SeitenHealth Safety Environment & SD Specification For Ionising RadiationcgnanaponNoch keine Bewertungen
- Ijfetr 2022 0039Dokument11 SeitenIjfetr 2022 0039Abdoo DadaNoch keine Bewertungen
- L3510 BaldorDokument11 SeitenL3510 BaldorAbraham VillanuevaNoch keine Bewertungen
- Electrophilic and Free Radical Benzene Toluene Nitrating: Nitration of and With Various AgentsDokument5 SeitenElectrophilic and Free Radical Benzene Toluene Nitrating: Nitration of and With Various Agentsmutia rizki anandaNoch keine Bewertungen
- Test#1: Sub Inspector Bs14: EmailDokument34 SeitenTest#1: Sub Inspector Bs14: EmailEngr T . TNoch keine Bewertungen
- For Use With The Eaton 9355 (20/30kVA) UPS: Eaton Internal Battery InstructionsDokument20 SeitenFor Use With The Eaton 9355 (20/30kVA) UPS: Eaton Internal Battery InstructionsFernando Riera SalaNoch keine Bewertungen
- Competency Log EC-12 Interactive ChartDokument24 SeitenCompetency Log EC-12 Interactive ChartNathan MeeceNoch keine Bewertungen
- Chapter 11 - QuestionsDokument18 SeitenChapter 11 - QuestionsMinh AnhNoch keine Bewertungen
- 6 Rules For Teaching GrammarDokument2 Seiten6 Rules For Teaching GrammarBilly De Guzman Uson50% (2)
- MONTAGE Expanded": Promotional DownloadDokument14 SeitenMONTAGE Expanded": Promotional DownloadLeandro MendesNoch keine Bewertungen
- Derivatives Commodity Derivatives FGLD EnglishDokument13 SeitenDerivatives Commodity Derivatives FGLD EnglishrexNoch keine Bewertungen
- Bizhub C360i C300i C250i SeriesDokument16 SeitenBizhub C360i C300i C250i SeriesCCS HHYDNoch keine Bewertungen
- Flange Heaters - CX: Application CorrosionDokument12 SeitenFlange Heaters - CX: Application CorrosionGustav MolMedNoch keine Bewertungen
- Ventilator Emvie 9+Dokument6 SeitenVentilator Emvie 9+dedezagita_1_laelyNoch keine Bewertungen
- Excel Solver Sensitivity Analysis PDFDokument2 SeitenExcel Solver Sensitivity Analysis PDFMaurice100% (1)
- RD730Dokument2 SeitenRD730sandi saputraNoch keine Bewertungen
- Latex by Example: Sesfs File ServerDokument5 SeitenLatex by Example: Sesfs File Servervg_mrtNoch keine Bewertungen
- 2.Trần Hưng Đạo Bình ThuậnDokument18 Seiten2.Trần Hưng Đạo Bình ThuậnHa HoangNoch keine Bewertungen
- Emerging Markets Case Studies (ISSN: 2045-0621) Guide To Writing A Teaching Note Purpose of A Teaching NoteDokument6 SeitenEmerging Markets Case Studies (ISSN: 2045-0621) Guide To Writing A Teaching Note Purpose of A Teaching NoteFildzah FichanNoch keine Bewertungen
- CNSLDokument18 SeitenCNSLrafeekNoch keine Bewertungen