Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Opening The Third EyeDokument13 SeitenOpening The Third EyekakamacgregorNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Brain Alchemy Masterclass PsychotacticsDokument87 SeitenBrain Alchemy Masterclass Psychotacticskscmain83% (6)
- 4th Conference ParticipantsDokument14 Seiten4th Conference ParticipantsmaxNoch keine Bewertungen
- Smarajit Ghosh - Control Systems - Theory and Applications-Pearson (2006) PDFDokument629 SeitenSmarajit Ghosh - Control Systems - Theory and Applications-Pearson (2006) PDFaggarwalakanksha100% (2)
- Form IEPF 2 - 2012 2013FDokument2.350 SeitenForm IEPF 2 - 2012 2013FYam ServínNoch keine Bewertungen
- Electric Vehicle Charging Station BplanDokument19 SeitenElectric Vehicle Charging Station BplanAjithNoch keine Bewertungen
- KVM Architecture OverviewDokument15 SeitenKVM Architecture Overviewdattbbk1Noch keine Bewertungen
- Antonov 225 - The Largest - Airliner in The WorldDokument63 SeitenAntonov 225 - The Largest - Airliner in The WorldFridayFunStuffNoch keine Bewertungen
- Ojt HRMDokument7 SeitenOjt HRMArlyn Joy NacinoNoch keine Bewertungen
- Sensors: Millimetre-Wave Backhaul For 5G Networks: Challenges and SolutionsDokument17 SeitenSensors: Millimetre-Wave Backhaul For 5G Networks: Challenges and SolutionsAhmed GadNoch keine Bewertungen
- New LicenceDokument3 SeitenNew LicenceAhmed GadNoch keine Bewertungen
- 481 Lecture 33 - RF AMPDokument11 Seiten481 Lecture 33 - RF AMPAhmed GadNoch keine Bewertungen
- Wireless Multi-Standard TerminalsDokument22 SeitenWireless Multi-Standard TerminalsAhmed GadNoch keine Bewertungen
- Amp DesignDokument44 SeitenAmp DesignAli KashiNoch keine Bewertungen
- Eecs242 Lect7 PowergainDokument20 SeitenEecs242 Lect7 PowergainAhmed GadNoch keine Bewertungen
- Motion in Electric FieldsDokument43 SeitenMotion in Electric FieldsDiego RoméNoch keine Bewertungen
- Solution Manual of Appendix A Exercise at (CMOS VLSI Design) by NEILL and HarrisDokument13 SeitenSolution Manual of Appendix A Exercise at (CMOS VLSI Design) by NEILL and HarrisAhmed Gad100% (1)
- Ahdl1 PDFDokument1 SeiteAhdl1 PDFAhmed GadNoch keine Bewertungen
- 4 - Bit - Carry - Propagate - Adder PDFDokument32 Seiten4 - Bit - Carry - Propagate - Adder PDFAhmed GadNoch keine Bewertungen
- Generalised Ultimate Loads For Pile GroupsDokument22 SeitenGeneralised Ultimate Loads For Pile GroupsValerioNoch keine Bewertungen
- Green Team Work PlanDokument2 SeitenGreen Team Work PlanScott FranzNoch keine Bewertungen
- A Modified Linear Programming Method For Distribution System ReconfigurationDokument6 SeitenA Modified Linear Programming Method For Distribution System Reconfigurationapi-3697505Noch keine Bewertungen
- Oracle® Secure Backup: Installation and Configuration Guide Release 10.4Dokument178 SeitenOracle® Secure Backup: Installation and Configuration Guide Release 10.4andrelmacedoNoch keine Bewertungen
- Aggregate Production PlanningDokument5 SeitenAggregate Production PlanningSarbani SahuNoch keine Bewertungen
- Cavitation in Francis PDFDokument373 SeitenCavitation in Francis PDFAlberto AliagaNoch keine Bewertungen
- Vedic Town Planning ConceptsDokument17 SeitenVedic Town Planning ConceptsyaminiNoch keine Bewertungen
- Tours and Travel MNGTDokument16 SeitenTours and Travel MNGTArpita Jaiswal100% (5)
- UGC NET Paper I PreviousDokument16 SeitenUGC NET Paper I PreviousKirran Khumar GollaNoch keine Bewertungen
- Presentacion Peaks Rms Lufs Como Usar Medidores FavorDokument16 SeitenPresentacion Peaks Rms Lufs Como Usar Medidores Favorhector.obregon.martinezNoch keine Bewertungen
- Tutorial 4 QuestionsDokument3 SeitenTutorial 4 QuestionshrfjbjrfrfNoch keine Bewertungen
- Real Estate (Regulation and Development) Act 2016 (RERA) CompliancesDokument15 SeitenReal Estate (Regulation and Development) Act 2016 (RERA) CompliancesM S PrasadNoch keine Bewertungen
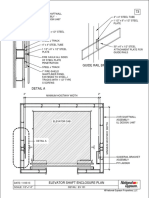
- Guide Rail Bracket AssemblyDokument1 SeiteGuide Rail Bracket AssemblyPrasanth VarrierNoch keine Bewertungen
- Syllabus 9701 Chemistry AS: AS or A2 UnitsDokument4 SeitenSyllabus 9701 Chemistry AS: AS or A2 UnitsHubbak KhanNoch keine Bewertungen
- International Beach Soccer Cup Bali 2023 October 4-7 - Ver 15-3-2023 - Sponsor UPDATED PDFDokument23 SeitenInternational Beach Soccer Cup Bali 2023 October 4-7 - Ver 15-3-2023 - Sponsor UPDATED PDFPrincess Jasmine100% (1)
- Dur MalappuramDokument114 SeitenDur MalappuramSabareesh RaveendranNoch keine Bewertungen
- Case Study StarbucksDokument2 SeitenCase Study StarbucksSonal Agarwal100% (2)
- OD - SAP Connector UtilityDokument22 SeitenOD - SAP Connector UtilityShivani SharmaNoch keine Bewertungen
- CHECK - Chapter 11 TCD AnswersDokument6 SeitenCHECK - Chapter 11 TCD AnswersbonolomphaNoch keine Bewertungen
- English Literature Coursework Aqa GcseDokument6 SeitenEnglish Literature Coursework Aqa Gcsef5d17e05100% (2)
- Omegas Prezentacija 01Dokument20 SeitenOmegas Prezentacija 01Predrag Djordjevic100% (1)