Das könnte Ihnen auch gefallen
- Manual de Esquemas Electricos MOELLERDokument546 SeitenManual de Esquemas Electricos MOELLEROG100% (31)
- Circuitos resonantes RLCDokument5 SeitenCircuitos resonantes RLCJose ValeroNoch keine Bewertungen
- Amplificadores electrónicos realimentación negativaDokument5 SeitenAmplificadores electrónicos realimentación negativaSergio SergioNoch keine Bewertungen
- Resumen de Capitulos Modulo 2Dokument29 SeitenResumen de Capitulos Modulo 2Maria Teresa Escobar RamirezNoch keine Bewertungen
- Electronic A 2Dokument73 SeitenElectronic A 2luisbravo_20Noch keine Bewertungen
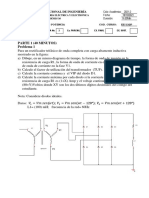
- Practica Calificada N°1 - Máquinas Eléctricas (EN5001) - Teoría 1 - 2021 - 1Dokument5 SeitenPractica Calificada N°1 - Máquinas Eléctricas (EN5001) - Teoría 1 - 2021 - 1AlternoNoch keine Bewertungen
- Algoritmo de Deteccion de Bordes Con NiosiiDokument65 SeitenAlgoritmo de Deteccion de Bordes Con NiosiiAlexander Merejildo TomaláNoch keine Bewertungen
- Exa Utec 1er Parcial Fisica 3Dokument4 SeitenExa Utec 1er Parcial Fisica 3Efrén Arriaga GonzálezNoch keine Bewertungen
- Examen Final - Estatica 2022-BDokument3 SeitenExamen Final - Estatica 2022-BJOSE MARTIN CASADO MARQUEZNoch keine Bewertungen
- MT335 20202 Sem09Dokument119 SeitenMT335 20202 Sem09Luis Huarcaya TorresNoch keine Bewertungen
- Tele ExamenDokument4 SeitenTele ExamenDiego tapiaNoch keine Bewertungen
- SPC1 Ee615 2017 1Dokument4 SeitenSPC1 Ee615 2017 1Jhunior GuevaraNoch keine Bewertungen
- Laboratorio N°2Dokument15 SeitenLaboratorio N°2Brayan VQNoch keine Bewertungen
- PC4 Ee647 - Fiee UniDokument2 SeitenPC4 Ee647 - Fiee UniDavidNoch keine Bewertungen
- UTP-SRN-SL1 Funciones de Rna PDFDokument15 SeitenUTP-SRN-SL1 Funciones de Rna PDFcarlosandresdavidbueNoch keine Bewertungen
- 1.6 Potencia y ConclusionesDokument5 Seiten1.6 Potencia y ConclusionesJavier ZevallosNoch keine Bewertungen
- Labo N°1 - Com. AnalógicaDokument25 SeitenLabo N°1 - Com. AnalógicaTakeshi Cardenas NunhezNoch keine Bewertungen
- Conversión Digital Análoga con DAC0808Dokument2 SeitenConversión Digital Análoga con DAC0808Allan PerezNoch keine Bewertungen
- Análisis filtros pasabanda activos MFB ProteusDokument3 SeitenAnálisis filtros pasabanda activos MFB ProteusLC LyonNoch keine Bewertungen
- EXAMEN PARCIAL Circuitos Electricos 2Dokument2 SeitenEXAMEN PARCIAL Circuitos Electricos 2maicol sumaranNoch keine Bewertungen
- Amplificador Simétrico ComplementarioDokument4 SeitenAmplificador Simétrico ComplementarioRaulDeRivia100% (1)
- Msc. Ántero Castro NietoDokument19 SeitenMsc. Ántero Castro NietoJean SantistebanNoch keine Bewertungen
- Informe Final Diseño de ContadoresDokument16 SeitenInforme Final Diseño de ContadoresAlex SevillaNoch keine Bewertungen
- LAB2MICRODokument10 SeitenLAB2MICROnorith rengifo crisantoNoch keine Bewertungen
- Controladores CADokument22 SeitenControladores CAVictor Junco RenteraNoch keine Bewertungen
- PC2 Ee532 - Fiee UniDokument8 SeitenPC2 Ee532 - Fiee UniDavidNoch keine Bewertungen
- Laboratorio #1Dokument12 SeitenLaboratorio #1Miguel AlonsoNoch keine Bewertungen
- Ejercicios VLSM, sumarización y enrutamiento IPv4Dokument39 SeitenEjercicios VLSM, sumarización y enrutamiento IPv4Gustavo Pinares MamaniNoch keine Bewertungen
- LABORATORIO 05 - 2 Contadores AsincronosDokument5 SeitenLABORATORIO 05 - 2 Contadores AsincronosDarwin YoverdNoch keine Bewertungen
- Informe PLC BatchDokument12 SeitenInforme PLC BatchSebastian Castro100% (1)
- 002.-S07 - Lab - Exploración TCP y UDPDokument10 Seiten002.-S07 - Lab - Exploración TCP y UDPvinceNoch keine Bewertungen
- Manual de Practicas Electronica IIDokument6 SeitenManual de Practicas Electronica IIUtla El SalvadorNoch keine Bewertungen
- Lab 4 - ADC-DAC-2018 - 2Dokument3 SeitenLab 4 - ADC-DAC-2018 - 2fieeg4Noch keine Bewertungen
- Lab07 Filtros Activos Tataje UruriDokument16 SeitenLab07 Filtros Activos Tataje UruriAntony UruriNoch keine Bewertungen
- EOG ResumenDokument7 SeitenEOG ResumenAlonso Cervantes CastroNoch keine Bewertungen
- Guia6 EnrutamientoDinamicoRIP PDFDokument11 SeitenGuia6 EnrutamientoDinamicoRIP PDFManuel LopezNoch keine Bewertungen
- Sistemas Embebidos Clase 1Dokument42 SeitenSistemas Embebidos Clase 1Tesla McLovinNoch keine Bewertungen
- Rectificación Onda Completa 5VDokument3 SeitenRectificación Onda Completa 5VWilliams SacalxotNoch keine Bewertungen
- LAB 7 Circ SecuencialesDokument3 SeitenLAB 7 Circ SecuencialesVictor Angel Yurivilca LazoNoch keine Bewertungen
- Ex. Final Ee532 - Fiee UniDokument8 SeitenEx. Final Ee532 - Fiee UniDavidNoch keine Bewertungen
- Resolucion Del Examen ParcialDokument6 SeitenResolucion Del Examen ParcialManuel HTNoch keine Bewertungen
- KC85TDokument2 SeitenKC85TValmore Camero100% (1)
- Configuración e interrupciones PIC18FDokument19 SeitenConfiguración e interrupciones PIC18FCarlos Pozo ContrerasNoch keine Bewertungen
- Realización Del Sistema de Control de Temperatura y HumedadDokument6 SeitenRealización Del Sistema de Control de Temperatura y HumedadJose CordobaNoch keine Bewertungen
- Informe 1 - Ramirez Rodriguez CarloDokument7 SeitenInforme 1 - Ramirez Rodriguez Carlocarlo ramirez rodriguezNoch keine Bewertungen
- Final 5 Solo Falta DanielDokument7 SeitenFinal 5 Solo Falta DanielMarcos CnNoch keine Bewertungen
- Problemas Grupo 6Dokument18 SeitenProblemas Grupo 6cupido0005Noch keine Bewertungen
- 6.2.2.5 Lab - Configuring IPv4 Static and Default Routes - JohannesRojasDokument18 Seiten6.2.2.5 Lab - Configuring IPv4 Static and Default Routes - JohannesRojasMilena TorresNoch keine Bewertungen
- Práctica de Laboratorio #5Dokument8 SeitenPráctica de Laboratorio #5jesus de la cruzNoch keine Bewertungen
- Informe Previo N2 Microelectronica UnmsmDokument11 SeitenInforme Previo N2 Microelectronica UnmsmRussell Oscar QFNoch keine Bewertungen
- Laboratorio 3 MicroelectronicaDokument8 SeitenLaboratorio 3 MicroelectronicaAlvaro SegoviaNoch keine Bewertungen
- Informe Laboratorio 1Dokument5 SeitenInforme Laboratorio 1Porfin AlguienNoch keine Bewertungen
- SonquilloDokument12 SeitenSonquilloANTHONY VALENCIA ZUTANoch keine Bewertungen
- Circuitos mezcladores y PLL resueltosDokument10 SeitenCircuitos mezcladores y PLL resueltosRicardo CampanaNoch keine Bewertungen
- Control Moderno Lab 2Dokument22 SeitenControl Moderno Lab 2Harold Joel Zurita LinaresNoch keine Bewertungen
- MovicomDokument12 SeitenMovicomCristián GZNoch keine Bewertungen
- Ip-1 Ee-635-NDokument21 SeitenIp-1 Ee-635-NLizeth CastroNoch keine Bewertungen
- Filtro digital: ventajas, clasificaciones e implementaciónDokument26 SeitenFiltro digital: ventajas, clasificaciones e implementaciónmark121416Noch keine Bewertungen
- Metodo de REMEZ1Dokument19 SeitenMetodo de REMEZ1carlos MoralesNoch keine Bewertungen
- Diseño de filtros digitales: FIR vs IIRDokument19 SeitenDiseño de filtros digitales: FIR vs IIRAngel CondeNoch keine Bewertungen
- FiltradoDokument71 SeitenFiltradoAna MorenoNoch keine Bewertungen
- Curso de AtomatismoDokument68 SeitenCurso de AtomatismoJaime Cors FlamburyNoch keine Bewertungen
- Problemas 4-6Dokument10 SeitenProblemas 4-6Marta RinconNoch keine Bewertungen
- La física y la biología: dos disciplinas que conviene conectarDokument5 SeitenLa física y la biología: dos disciplinas que conviene conectarArturo Montero LoriaNoch keine Bewertungen
- Bioestadistica 1Dokument26 SeitenBioestadistica 1carol024Noch keine Bewertungen
- Curso de Easy Texto de AvanceDokument27 SeitenCurso de Easy Texto de AvanceJaime Cors FlamburyNoch keine Bewertungen
- Procedimiento Auditorias Internas - Modelo AlumnosDokument4 SeitenProcedimiento Auditorias Internas - Modelo AlumnosJaime Cors FlamburyNoch keine Bewertungen
- Aterramiento ElectricoDokument8 SeitenAterramiento ElectricoJaime Cors FlamburyNoch keine Bewertungen
- Tutorial CaDe_SIMU software automatizaciónDokument21 SeitenTutorial CaDe_SIMU software automatizaciónRichard Barrantes100% (2)