Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Among Many Cases, 2 Armor Specimens, Each Made Up of A Layer ofDokument1 SeiteAmong Many Cases, 2 Armor Specimens, Each Made Up of A Layer ofAlireza ShojaeyanNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Impact Was Classified Between The 3A and 4 Threat-LevelDokument1 SeiteThe Impact Was Classified Between The 3A and 4 Threat-LevelAlireza ShojaeyanNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Shooting Experiments On Alumina/steel Plates Are Used For ComparisoDokument1 SeiteThe Shooting Experiments On Alumina/steel Plates Are Used For ComparisoAlireza ShojaeyanNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- A Single ss109 Bullet Was Fired Upon Each SpecimenDokument1 SeiteA Single ss109 Bullet Was Fired Upon Each SpecimenAlireza ShojaeyanNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Of The NIJ Standard (5), Which Is Also Adopted Into An Equivalent Code For The Royal Thai MilitaryDokument1 SeiteOf The NIJ Standard (5), Which Is Also Adopted Into An Equivalent Code For The Royal Thai MilitaryAlireza ShojaeyanNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- This StudyDokument1 SeiteThis StudyAlireza ShojaeyanNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- At This High Impacting VelocityDokument1 SeiteAt This High Impacting VelocityAlireza ShojaeyanNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Prior Studies On Various Aspects of ABAQUS Finite Element Simulation Were The Effects of Stress Wave Propagation From Dynamic LoadsDokument1 SeiteThe Prior Studies On Various Aspects of ABAQUS Finite Element Simulation Were The Effects of Stress Wave Propagation From Dynamic LoadsAlireza ShojaeyanNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Numerical Simulations of Ballistic Impact of Ss109 On AluminaDokument1 SeiteNumerical Simulations of Ballistic Impact of Ss109 On AluminaAlireza ShojaeyanNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Numerical Simulations of Ballistic Impact of Ss109 On AluminaDokument1 SeiteNumerical Simulations of Ballistic Impact of Ss109 On AluminaAlireza ShojaeyanNoch keine Bewertungen
- The National Metal and Materials Technology CenterDokument1 SeiteThe National Metal and Materials Technology CenterAlireza ShojaeyanNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- 8Dokument4 Seiten8Alireza ShojaeyanNoch keine Bewertungen
- Basic HydraulicDokument1 SeiteBasic HydraulicAlireza ShojaeyanNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Jcie 01Dokument10 SeitenJcie 01Alireza ShojaeyanNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Section 4.3: Lifting ForkDokument3 SeitenSection 4.3: Lifting ForkAlireza ShojaeyanNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Cdraft ch3-1Dokument22 SeitenCdraft ch3-1Alireza ShojaeyanNoch keine Bewertungen
- Carl Gustaf Antitank Recoilless RifleDokument4 SeitenCarl Gustaf Antitank Recoilless RifleAlireza Shojaeyan67% (3)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Application Brief Ballistic HelmetDokument4 SeitenApplication Brief Ballistic HelmetAhmed TahaNoch keine Bewertungen
- 99120070401Dokument6 Seiten99120070401Alireza ShojaeyanNoch keine Bewertungen
- SPPHYS2 Module 4th QRTR FinalDokument37 SeitenSPPHYS2 Module 4th QRTR FinalJayson GamboaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Least Learned Skills /competencies: Subject/Grade: Science 7 Grading Period: Third School Year: 2020-2021Dokument4 SeitenLeast Learned Skills /competencies: Subject/Grade: Science 7 Grading Period: Third School Year: 2020-2021marissa quijanoNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- EN40: Dynamics and Vibrations Homework 3: Solving Equations of Motion For Particles Due Friday Feb 13Dokument5 SeitenEN40: Dynamics and Vibrations Homework 3: Solving Equations of Motion For Particles Due Friday Feb 13Thuy LinhNoch keine Bewertungen
- Projectile Motion HelpDokument2 SeitenProjectile Motion HelpJДЅМЇЙЄ JЦLЇЄТNoch keine Bewertungen
- Units and DimensionsDokument15 SeitenUnits and DimensionsShiv Bera0% (1)
- LEC-7 Kinematics of Rigid BodiesDokument62 SeitenLEC-7 Kinematics of Rigid BodiesMenatalla MohamedNoch keine Bewertungen
- Laboratory Activity 7 - Acceleration AnalysisDokument2 SeitenLaboratory Activity 7 - Acceleration AnalysisDavid SaldivarNoch keine Bewertungen
- MT V1 Physics 1A03 F19 FINAL Watermark AvenueDokument11 SeitenMT V1 Physics 1A03 F19 FINAL Watermark Avenueproplayer910Noch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
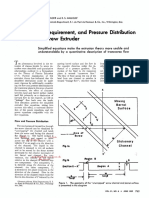
- Flow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderDokument6 SeitenFlow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderLê Văn HòaNoch keine Bewertungen
- Aqa Mm1a MM1B Mm2a MM2B MM03 MM04 MM05 SQPDokument62 SeitenAqa Mm1a MM1B Mm2a MM2B MM03 MM04 MM05 SQPclassicalcatNoch keine Bewertungen
- NddvjiyfgnkDokument7 SeitenNddvjiyfgnkClyde QuitorasNoch keine Bewertungen
- The Physics Behind TrampolineDokument9 SeitenThe Physics Behind Trampolineapi-305978163Noch keine Bewertungen
- Definitions of Physical QuantitiesDokument41 SeitenDefinitions of Physical QuantitiesAnonymous QiMB2lBCJLNoch keine Bewertungen
- SPE15010Dokument11 SeitenSPE15010Leandro NavarroNoch keine Bewertungen
- Part I Core and AHL 1: Topic 1: Physics and Physical Measurement 2Dokument129 SeitenPart I Core and AHL 1: Topic 1: Physics and Physical Measurement 2ravimashru50% (2)
- Crossword Puzzle Physics Acceleration, Velocity, Three Laws of MotionDokument3 SeitenCrossword Puzzle Physics Acceleration, Velocity, Three Laws of Motionstefia lanzNoch keine Bewertungen
- Aerody Lesson 3Dokument29 SeitenAerody Lesson 3Kyle MedranoNoch keine Bewertungen
- J3010 - Mechanics of Machines 1Dokument140 SeitenJ3010 - Mechanics of Machines 1Munisprasad MuniandyNoch keine Bewertungen
- Mec31 Solution Manual PDFDokument299 SeitenMec31 Solution Manual PDFXenon Asuncion50% (2)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Prediction of Ground VibrationDokument10 SeitenPrediction of Ground VibrationWilkhen ChuraNoch keine Bewertungen
- Learning Activity Sheets in Physics 1 Week 2Dokument9 SeitenLearning Activity Sheets in Physics 1 Week 2John DcNoch keine Bewertungen
- Disclosure To Promote The Right To InformationDokument23 SeitenDisclosure To Promote The Right To InformationVikas KumarNoch keine Bewertungen
- Tsu m17 Practice Problems Statics of Rigid BodiesDokument2 SeitenTsu m17 Practice Problems Statics of Rigid BodiesMark Lester ValdozNoch keine Bewertungen
- Dynamics Chapter 13Dokument9 SeitenDynamics Chapter 13ABDFERNoch keine Bewertungen
- TT1 2016Dokument5 SeitenTT1 2016Anandraj GovindarajNoch keine Bewertungen
- KinematicsDokument37 SeitenKinematicsArun Kumar SahaNoch keine Bewertungen
- Newton's Laws & Weight 1 QPDokument11 SeitenNewton's Laws & Weight 1 QPRabia RafiqueNoch keine Bewertungen
- Module 2 - Work, Power & Energy 11-13Dokument9 SeitenModule 2 - Work, Power & Energy 11-13Argel Panganiban DalwampoNoch keine Bewertungen
- Part 03 Continuum MechanicsDokument75 SeitenPart 03 Continuum Mechanicszakariyae el mourabitNoch keine Bewertungen
- Aerodynamics for Engineering StudentsVon EverandAerodynamics for Engineering StudentsBewertung: 5 von 5 Sternen5/5 (5)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideVon Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideBewertung: 3.5 von 5 Sternen3.5/5 (7)