Das könnte Ihnen auch gefallen
- The Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024Von EverandThe Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024Noch keine Bewertungen
- 3G Key Performance Indicators (KPI)Dokument25 Seiten3G Key Performance Indicators (KPI)Salah Salah60% (5)
- Solar Desalination PlantDokument28 SeitenSolar Desalination PlantAnonymous TETH310% (1)
- Fitter ToolsDokument7 SeitenFitter ToolsSainadhReddy100% (1)
- Nabll Mix DesignDokument29 SeitenNabll Mix DesignPIDCL WITH SUBUDHINoch keine Bewertungen
- Column and Wall Load Take Down Spreadsheet v1.0 - CLDokument28 SeitenColumn and Wall Load Take Down Spreadsheet v1.0 - CLBilal KhattabNoch keine Bewertungen
- Introduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationVon EverandIntroduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationNoch keine Bewertungen
- NokiakpiandcoreoptimizationDokument69 SeitenNokiakpiandcoreoptimizationeduy2k100% (2)
- J320 Maintenance Spare Parts ListDokument1 SeiteJ320 Maintenance Spare Parts ListKeith ChengNoch keine Bewertungen
- 3G Cluster Pre-OptimizationDokument41 Seiten3G Cluster Pre-OptimizationAditya NamaNoch keine Bewertungen
- 3g Drive Test PPT 130218111718 Phpapp02Dokument36 Seiten3g Drive Test PPT 130218111718 Phpapp02Yudil Taufik UmarNoch keine Bewertungen
- GSM KPI OptimizationDokument54 SeitenGSM KPI Optimizationpayam12Noch keine Bewertungen
- Technical Reference Guide On Steam DistributionDokument66 SeitenTechnical Reference Guide On Steam DistributionDainycious KibiwottNoch keine Bewertungen
- Introduction to Computational Fluid Dynamics (CFDDokument53 SeitenIntroduction to Computational Fluid Dynamics (CFDmahe32maheNoch keine Bewertungen
- Introduction To Computational Fluid DynamicsDokument24 SeitenIntroduction To Computational Fluid DynamicsnugrohoisnandiNoch keine Bewertungen
- RWGDokument67 SeitenRWGPratik ChatterjeeNoch keine Bewertungen
- Dual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsDokument4 SeitenDual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsСергей ТатарченкоNoch keine Bewertungen
- 4 - Continuous Time SimulationDokument32 Seiten4 - Continuous Time SimulationhebaNoch keine Bewertungen
- 11 RoutingDokument23 Seiten11 Routingketchrajath24Noch keine Bewertungen
- Gps Carrier MethodsDokument63 SeitenGps Carrier MethodsKap KolkataNoch keine Bewertungen
- At-Speed Test Methods for LSSD and Mux Flip-Flop DesignsDokument5 SeitenAt-Speed Test Methods for LSSD and Mux Flip-Flop DesignsAman TyagiNoch keine Bewertungen
- Simulating Biological Flows Using Embedded Boundary MethodsDokument68 SeitenSimulating Biological Flows Using Embedded Boundary Methods2009tamerNoch keine Bewertungen
- International Organisation For Standardisation Organisation Internationale de Normalisation ISO/IEC JTC1/SC29/WG11 Coding of Moving Pictures and Audio ISO/IEC JTC1/SC29/WG11 MPEG2006Dokument44 SeitenInternational Organisation For Standardisation Organisation Internationale de Normalisation ISO/IEC JTC1/SC29/WG11 Coding of Moving Pictures and Audio ISO/IEC JTC1/SC29/WG11 MPEG2006ANKIT BHURANENoch keine Bewertungen
- GPS Seminar on Working and ProgrammingDokument43 SeitenGPS Seminar on Working and ProgrammingNitesh KumarNoch keine Bewertungen
- Amrul Faruq ROV 2013Dokument13 SeitenAmrul Faruq ROV 2013Amrul FaruqNoch keine Bewertungen
- PLL 1Dokument17 SeitenPLL 1green_way26Noch keine Bewertungen
- DT Analysis Guidelines v001.ALDokument14 SeitenDT Analysis Guidelines v001.ALAkiro VianhNoch keine Bewertungen
- NRCan CSRS-PPP-v3 - Tutorial ENDokument11 SeitenNRCan CSRS-PPP-v3 - Tutorial ENhNoch keine Bewertungen
- Guidelines For Transformation Between Local and Global DatumsDokument6 SeitenGuidelines For Transformation Between Local and Global DatumsSuta VijayaNoch keine Bewertungen
- Op Tim Is at IonDokument22 SeitenOp Tim Is at IonKhairy ElsayedNoch keine Bewertungen
- CFD (Introduction)Dokument46 SeitenCFD (Introduction)murad_ashourNoch keine Bewertungen
- A 0.31-1 GHZ Fast-Corrected Duty-Cycle Corrector With Successive Approximation Register For DDR DRAM ApplicationsDokument5 SeitenA 0.31-1 GHZ Fast-Corrected Duty-Cycle Corrector With Successive Approximation Register For DDR DRAM Applicationspraba821Noch keine Bewertungen
- Introduction To Computational Fluid Dynamics (CFD) : Tao Xing and Fred SternDokument52 SeitenIntroduction To Computational Fluid Dynamics (CFD) : Tao Xing and Fred Sternknaidu_1Noch keine Bewertungen
- Chapter 6 Adaptive FiltersDokument59 SeitenChapter 6 Adaptive FilterstadeleNoch keine Bewertungen
- Batch 4 Major Project PPT WaveletDokument27 SeitenBatch 4 Major Project PPT WaveletAdluri srikarNoch keine Bewertungen
- ITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship CFD ApplicationsDokument18 SeitenITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship CFD ApplicationsHamed HmNoch keine Bewertungen
- 5 Controller Area NetworksDokument55 Seiten5 Controller Area NetworksAli BassiounyNoch keine Bewertungen
- KPI in LTE Radio NetworkDokument14 SeitenKPI in LTE Radio NetworkDaniel VivasNoch keine Bewertungen
- Auto Comp GuideDokument65 SeitenAuto Comp GuideAli Zitouna HamedNoch keine Bewertungen
- Unit 5Dokument60 SeitenUnit 5sparsh kaudinyaNoch keine Bewertungen
- Multi-Resolution Climate Modeling: Principle InvestigatorsDokument34 SeitenMulti-Resolution Climate Modeling: Principle InvestigatorsSalam FaithNoch keine Bewertungen
- Leitner Et Al - 2016 - Digital LDO Modeling For Early Design Space ExplorationDokument6 SeitenLeitner Et Al - 2016 - Digital LDO Modeling For Early Design Space Exploration马晓飞Noch keine Bewertungen
- Lecture 3 - Data Capturing Techniques - Total Station and GPSDokument26 SeitenLecture 3 - Data Capturing Techniques - Total Station and GPSCisco ManNoch keine Bewertungen
- Ee50238 - NGC 7 - Dgnss LpsDokument12 SeitenEe50238 - NGC 7 - Dgnss Lpsappleifxxkutill2046Noch keine Bewertungen
- ChE170 Lecture 9 (Control Tuning) PDFDokument27 SeitenChE170 Lecture 9 (Control Tuning) PDFRowieNoch keine Bewertungen
- Geocell LTE Optimisation Plan v1Dokument31 SeitenGeocell LTE Optimisation Plan v1Anonymous 56r2hICtlNoch keine Bewertungen
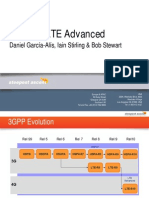
- LTE and LTE Advanced - WorkshopDokument16 SeitenLTE and LTE Advanced - WorkshopthevermeNoch keine Bewertungen
- Robust Non-Communication Line Protection Scheme Using Novel QuantitiesDokument8 SeitenRobust Non-Communication Line Protection Scheme Using Novel QuantitiessunitharajababuNoch keine Bewertungen
- 1709269227711Dokument19 Seiten1709269227711charykatakam64Noch keine Bewertungen
- 2003 StabilityAnalysisDokument58 Seiten2003 StabilityAnalysisSettuNoch keine Bewertungen
- Digital-to-Analogue Conversion: PHY 406F - Microprocessor Interfacing TechniquesDokument14 SeitenDigital-to-Analogue Conversion: PHY 406F - Microprocessor Interfacing TechniquesMalou Ruiz DenolanNoch keine Bewertungen
- Positioning Techniques in 3G Networks SummaryDokument47 SeitenPositioning Techniques in 3G Networks SummaryRuchira ChinthakaNoch keine Bewertungen
- Fluent Introduction - Some Best Practice...Dokument29 SeitenFluent Introduction - Some Best Practice...TestNoch keine Bewertungen
- NOC Error CorrectionDokument7 SeitenNOC Error CorrectionNavin KumarNoch keine Bewertungen
- Speed Breaker Detection For A Ground Vehicle & Speed ControlDokument28 SeitenSpeed Breaker Detection For A Ground Vehicle & Speed Controlnagi427pNoch keine Bewertungen
- Control System Design AstromDokument42 SeitenControl System Design AstromademargcjuniorNoch keine Bewertungen
- Debug and Testability Features For Multi-Protocol 10G SerdesDokument5 SeitenDebug and Testability Features For Multi-Protocol 10G SerdesvelusnNoch keine Bewertungen
- 2011 - Howard's AlgorithmDokument6 Seiten2011 - Howard's AlgorithmRamona Elena PopaNoch keine Bewertungen
- 12.estimation - CorrelationsDokument18 Seiten12.estimation - Correlationssparsh100% (2)
- 21.lecture110324 GGE2012 GPS04 Tutorial ByAhn 2pagesDokument23 Seiten21.lecture110324 GGE2012 GPS04 Tutorial ByAhn 2pagesyerrypikalNoch keine Bewertungen
- 3a.1.2 - GPS ErrorsDokument34 Seiten3a.1.2 - GPS ErrorsParamjot SinghNoch keine Bewertungen
- Real-time Lidar Odometry and Mapping Using LOAMDokument10 SeitenReal-time Lidar Odometry and Mapping Using LOAMFALAK FATIMANoch keine Bewertungen
- Xilinx TimingClosureDokument31 SeitenXilinx TimingClosurehiperboreoatlantecNoch keine Bewertungen
- Routing: by Manjunatha Naik V Asst. Professor Dept. of ECE, RNSITDokument26 SeitenRouting: by Manjunatha Naik V Asst. Professor Dept. of ECE, RNSITmanjunathanaikvNoch keine Bewertungen
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsVon EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsBewertung: 1 von 5 Sternen1/5 (1)
- 12.540 Principles of Global Positioning Systems: Mit OpencoursewareDokument35 Seiten12.540 Principles of Global Positioning Systems: Mit Opencoursewaresparsh100% (2)
- 21.GPS Groups, IGSDokument14 Seiten21.GPS Groups, IGSsparsh100% (2)
- 14.propagation Medium - PropagationDokument24 Seiten14.propagation Medium - Propagationsparsh100% (2)
- MIT OpenCourseWare Http://Ocw - Mit.eduDokument20 SeitenMIT OpenCourseWare Http://Ocw - Mit.edusparsh100% (2)
- 20.processing SoftwareDokument31 Seiten20.processing Softwaresparsh100% (2)
- 12.540 Principles of Global Positioning Systems: Mit OpencoursewareDokument23 Seiten12.540 Principles of Global Positioning Systems: Mit Opencoursewaresparsh100% (2)
- 12.estimation - CorrelationsDokument18 Seiten12.estimation - Correlationssparsh100% (2)
- 11.statistical Approach To EstimationDokument21 Seiten11.statistical Approach To Estimationsparsh100% (2)
- 03.potential Fields and Coordinate SystemsDokument24 Seiten03.potential Fields and Coordinate Systemssparsh100% (2)
- 02.coordinate and Time SystemsDokument20 Seiten02.coordinate and Time Systemssparsh100% (2)
- WM 5.4 CLI Reference Guide PDFDokument1.239 SeitenWM 5.4 CLI Reference Guide PDFHermes GuerreroNoch keine Bewertungen
- LAB 2 Free N Force VibrationDokument8 SeitenLAB 2 Free N Force Vibrationmohdanis53yahoocomNoch keine Bewertungen
- Undergraduate Architectural Thesis Site and Village Study PDFDokument4 SeitenUndergraduate Architectural Thesis Site and Village Study PDFMalavika LaxmanNoch keine Bewertungen
- NPS-1 Piano Stand Lnstallation Guide: List of PartsDokument2 SeitenNPS-1 Piano Stand Lnstallation Guide: List of PartsFian PanekenanNoch keine Bewertungen
- Measure Wood DimensionsDokument6 SeitenMeasure Wood DimensionsThilak BalakrishnanNoch keine Bewertungen
- Oil GasDokument72 SeitenOil Gastony6868100% (1)
- Inductance Measurements For Synchronous MachinesDokument2 SeitenInductance Measurements For Synchronous MachinesYusuf YaşaNoch keine Bewertungen
- Optimal Transformer Tap Changing SettingDokument7 SeitenOptimal Transformer Tap Changing Settingtrust4joshNoch keine Bewertungen
- R07-HC3C20-AAP-MTS-CI-0005 (02) Method Statement of Site Mobilization at Island (Revised)Dokument32 SeitenR07-HC3C20-AAP-MTS-CI-0005 (02) Method Statement of Site Mobilization at Island (Revised)like saddamNoch keine Bewertungen
- Vdo Pressure GuageDokument14 SeitenVdo Pressure Guagezuma zaiamNoch keine Bewertungen
- 9mm!ূຌዡገ๕ۉ࿋ഗ Rotary Potentiometers With Metal Shaft Series: WH9011A-1-18TDokument26 Seiten9mm!ূຌዡገ๕ۉ࿋ഗ Rotary Potentiometers With Metal Shaft Series: WH9011A-1-18TpeterfunNoch keine Bewertungen
- EN 12663-1 - 2010 - IndiceDokument6 SeitenEN 12663-1 - 2010 - IndiceOhriol Pons Ribas67% (3)
- E 20925Dokument214 SeitenE 20925Ahmed ElshowbkeyNoch keine Bewertungen
- Engineering Mechanics Tutorial Question BankDokument13 SeitenEngineering Mechanics Tutorial Question Bankrajeev_kumar365Noch keine Bewertungen
- DP TV Aver 15022 DriversDokument94 SeitenDP TV Aver 15022 DriversMohammed Tahver Farooqi QuadriNoch keine Bewertungen
- Maximo Sandbox SettingsDokument6 SeitenMaximo Sandbox SettingsChandra SekharNoch keine Bewertungen
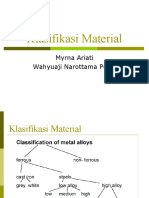
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDokument49 SeitenKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07Noch keine Bewertungen
- pd1185 Fire CodeDokument3 Seitenpd1185 Fire CodeCamille MangaranNoch keine Bewertungen
- SCT3030AL: 650V V R (Typ.) 30mDokument14 SeitenSCT3030AL: 650V V R (Typ.) 30mSas Pro EletronicaNoch keine Bewertungen
- Ganz Hydro-Power: Over 150 Years of ExperienceDokument1 SeiteGanz Hydro-Power: Over 150 Years of ExperiencepalanaruvaNoch keine Bewertungen
- G100-G102-Chassis-Manual #1Dokument151 SeitenG100-G102-Chassis-Manual #1Daihatsu Charade BanjarnegaraNoch keine Bewertungen
- Mohr's Circle Analysis of Rock Failure Under StressDokument26 SeitenMohr's Circle Analysis of Rock Failure Under StressNitishNoch keine Bewertungen
- SUN 72M Mono Crystalline Module PerformanceDokument2 SeitenSUN 72M Mono Crystalline Module PerformanceFernando VieiraNoch keine Bewertungen
- EE105 - Fall 2015 Microelectronic Devices and Circuits: Prof. Ming C. Wu Wu@eecs - Berkeley.edu 511 Sutardja Dai Hall (SDH)Dokument5 SeitenEE105 - Fall 2015 Microelectronic Devices and Circuits: Prof. Ming C. Wu Wu@eecs - Berkeley.edu 511 Sutardja Dai Hall (SDH)Kulanthaivelu RamaswamyNoch keine Bewertungen