Das könnte Ihnen auch gefallen
- Success Stories 123Dokument90 SeitenSuccess Stories 123Sai KrishnaNoch keine Bewertungen
- Eligibility Criteria EngDokument4 SeitenEligibility Criteria EngumashankarsinghNoch keine Bewertungen
- How and Where To Get MUDRA LoanDokument3 SeitenHow and Where To Get MUDRA LoanHiNoch keine Bewertungen
- The importance of Ekaadasi fasting in Madhwa philosophyDokument28 SeitenThe importance of Ekaadasi fasting in Madhwa philosophySai KrishnaNoch keine Bewertungen
- Onion and Garlic FactsDokument23 SeitenOnion and Garlic FactsSai Krishna100% (1)
- TimeDokument31 SeitenTimeSai KrishnaNoch keine Bewertungen
- Mems and Nanotechnology 2Dokument12 SeitenMems and Nanotechnology 2Sai Krishna100% (1)
- Dvaraka Krishna's CityDokument14 SeitenDvaraka Krishna's CitySai KrishnaNoch keine Bewertungen
- Email List of Devotees Interested in Learning About Tulasi DeviDokument1 SeiteEmail List of Devotees Interested in Learning About Tulasi DeviSai KrishnaNoch keine Bewertungen
- Art of Dealing With WomenDokument13 SeitenArt of Dealing With WomenSai KrishnaNoch keine Bewertungen
- Book 2Dokument12 SeitenBook 2Sai KrishnaNoch keine Bewertungen
- ISKCON Desire Tree - Romapada SwamiDokument522 SeitenISKCON Desire Tree - Romapada SwamiISKCON desire tree100% (3)
- Vaishnava SongsDokument124 SeitenVaishnava SongsSai KrishnaNoch keine Bewertungen
- Simple TruthDokument95 SeitenSimple TruthSai KrishnaNoch keine Bewertungen
- Krishna Consciousness For YouthDokument27 SeitenKrishna Consciousness For YouthSai Krishna100% (1)
- Secret To CareerDokument1 SeiteSecret To CareerSai KrishnaNoch keine Bewertungen
- ReincarnationDokument84 SeitenReincarnationVladimir Pavic100% (2)
- Spiritual Scientist - The Gita's Hidden Message of LoveDokument2 SeitenSpiritual Scientist - The Gita's Hidden Message of LoveSai KrishnaNoch keine Bewertungen
- Are Men and Women EqualDokument10 SeitenAre Men and Women EqualSai KrishnaNoch keine Bewertungen
- The Lotus FeetDokument9 SeitenThe Lotus FeetSai KrishnaNoch keine Bewertungen
- Vaishnava Etiquette ManualDokument93 SeitenVaishnava Etiquette Manual34añazos100% (3)
- Taking Care of Krishna DevoteesDokument185 SeitenTaking Care of Krishna DevoteesSai KrishnaNoch keine Bewertungen
- Words of Wisdom From Srila Bhaktisiddhanta Sarasvati ThakuraDokument1 SeiteWords of Wisdom From Srila Bhaktisiddhanta Sarasvati ThakuraSai KrishnaNoch keine Bewertungen
- IBPS PO Booster PDFDokument1 SeiteIBPS PO Booster PDFvinee9999Noch keine Bewertungen
- Fallacy of Final JudgementDokument4 SeitenFallacy of Final JudgementSai KrishnaNoch keine Bewertungen
- 2014 SBI Clerks Current Affairs QuestoinsDokument4 Seiten2014 SBI Clerks Current Affairs QuestoinsSai KrishnaNoch keine Bewertungen
- Clarifications Required From QURANDokument5 SeitenClarifications Required From QURANSai KrishnaNoch keine Bewertungen
- Failures Stepping StonesDokument12 SeitenFailures Stepping StonesSai KrishnaNoch keine Bewertungen
- Visitors 2014 Gr8AmbirtionZDokument3 SeitenVisitors 2014 Gr8AmbirtionZMahesh ChavanNoch keine Bewertungen
- Does God Exists - VGDDokument11 SeitenDoes God Exists - VGDSai KrishnaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Mapping of Significant Natural Resources: Category: Bodies of WaterDokument3 SeitenMapping of Significant Natural Resources: Category: Bodies of WaterDei HernandezNoch keine Bewertungen
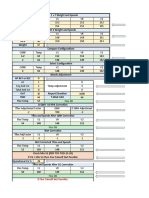
- A320 Flex CalculationDokument10 SeitenA320 Flex CalculationMansour TaoualiNoch keine Bewertungen
- Field Behaviour of Stiffened Deep Cement Mixing PilesDokument17 SeitenField Behaviour of Stiffened Deep Cement Mixing PilesNguyen Quoc KhanhNoch keine Bewertungen
- Barco High Performance MonitorsDokument34 SeitenBarco High Performance Monitorskishore13Noch keine Bewertungen
- Educ 61 Module 5 ActivityDokument4 SeitenEduc 61 Module 5 ActivityMitchille GetizoNoch keine Bewertungen
- Katsina Polytechnic Lecture Notes on History and Philosophy of Science, Technology and MathematicsDokument33 SeitenKatsina Polytechnic Lecture Notes on History and Philosophy of Science, Technology and MathematicsHamisu TafashiyaNoch keine Bewertungen
- Risk in Clean RoomDokument9 SeitenRisk in Clean RoomABEERNoch keine Bewertungen
- Some Reading Problems of Arab EFL Students: Dr. Kamal R. MourtagaDokument17 SeitenSome Reading Problems of Arab EFL Students: Dr. Kamal R. MourtagaANOOOSANoch keine Bewertungen
- Mechanical Vapor RecompressionDokument9 SeitenMechanical Vapor Recompressionnarayana reddy0% (1)
- Safety Steering System Alarm Code GuideDokument43 SeitenSafety Steering System Alarm Code GuideIsrael Michaud84% (19)
- Organizational Development and EvaluationDokument22 SeitenOrganizational Development and EvaluationFransisca RosalinNoch keine Bewertungen
- Accomplishment Report - English (Sy 2020-2021)Dokument7 SeitenAccomplishment Report - English (Sy 2020-2021)Erika Ikang WayawayNoch keine Bewertungen
- Generate power from solar roof tilesDokument4 SeitenGenerate power from solar roof tilesshalinthNoch keine Bewertungen
- Alpha 10 Mini Manual Rev1Dokument2 SeitenAlpha 10 Mini Manual Rev1k4gw100% (1)
- Microsoft Word - JOB DESCRIPTION Staff AccountantDokument2 SeitenMicrosoft Word - JOB DESCRIPTION Staff Accountantanon-634050100% (3)
- Sheet Metalworking 1 - Chapter 19Dokument99 SeitenSheet Metalworking 1 - Chapter 19xharpreetxNoch keine Bewertungen
- ACL-PDC-01 - Rev01 (Procurement Document Control)Dokument3 SeitenACL-PDC-01 - Rev01 (Procurement Document Control)Mo ZeroNoch keine Bewertungen
- Karnaugh MapsDokument7 SeitenKarnaugh Mapsdigitales100% (1)
- Cathodic Disbonding TesterDokument1 SeiteCathodic Disbonding TesterfelavinNoch keine Bewertungen
- Slippery? Contradictory? Sociologically Untenable? The Copenhagen School RepliesDokument10 SeitenSlippery? Contradictory? Sociologically Untenable? The Copenhagen School RepliesDaniel CorrenteNoch keine Bewertungen
- Atuador Ip67Dokument6 SeitenAtuador Ip67Wellington SoaresNoch keine Bewertungen
- Rom, Eprom, & Eeprom Technology: Figure 9-1. Read Only Memory SchematicDokument14 SeitenRom, Eprom, & Eeprom Technology: Figure 9-1. Read Only Memory SchematicVu LeNoch keine Bewertungen
- COE 107.04 Cathodic Protection Monitoring Instruments and ProceduresDokument42 SeitenCOE 107.04 Cathodic Protection Monitoring Instruments and ProceduresMo'tasem Serdaneh100% (1)
- Paper 2 Answer SPMDokument12 SeitenPaper 2 Answer SPMSylarkNoch keine Bewertungen
- Viavi: Variable Optical Attenuators (mVOA-C1)Dokument6 SeitenViavi: Variable Optical Attenuators (mVOA-C1)gwNoch keine Bewertungen
- Vocabulary Extension Starter Without AnswersDokument1 SeiteVocabulary Extension Starter Without AnswersPatrcia CostaNoch keine Bewertungen
- BF 00571142Dokument1 SeiteBF 00571142Tymoteusz DziedzicNoch keine Bewertungen
- UniSim Heat Exchangers User Guide PDFDokument22 SeitenUniSim Heat Exchangers User Guide PDFzhangyiliNoch keine Bewertungen
- Student Graduation Using DataMiningDokument207 SeitenStudent Graduation Using DataMiningDanielNoch keine Bewertungen
- Jack of All Trades ArchetypeDokument2 SeitenJack of All Trades ArchetypeGwazi MagnumNoch keine Bewertungen