Das könnte Ihnen auch gefallen
- McGraw-Hill - PIC Micro Controller Project Book by John Lovine - 2000Dokument220 SeitenMcGraw-Hill - PIC Micro Controller Project Book by John Lovine - 2000PRADEEP_P100% (1)
- Control With Wireless HartDokument9 SeitenControl With Wireless HartPRADEEP_PNoch keine Bewertungen
- Power Thyristor Application NotesDokument74 SeitenPower Thyristor Application NoteskjansaNoch keine Bewertungen
- (Jean J. Labrosse) Embedded Systems Building BlockDokument638 Seiten(Jean J. Labrosse) Embedded Systems Building Blocksklove123Noch keine Bewertungen
- The PIC MicrocontrollerDokument178 SeitenThe PIC MicrocontrollerVinayak KapoorNoch keine Bewertungen
- Linux Sys CallsDokument232 SeitenLinux Sys CallsKui MangusNoch keine Bewertungen
- Harta Lumii PDFDokument1 SeiteHarta Lumii PDFhonoguraiNoch keine Bewertungen
- Ebook - C Programming 4 Embedded Systems - Kirk ZurellDokument191 SeitenEbook - C Programming 4 Embedded Systems - Kirk Zurellmanojiitd2363100% (1)
- ARM in Embedded Applications - David Rose@ARMDokument24 SeitenARM in Embedded Applications - David Rose@ARMPRADEEP_P100% (3)
- Electric Motor Controls TutorialDokument24 SeitenElectric Motor Controls Tutorialvijai daniel100% (4)
- Humanoid Robots Human-Like MachinesDokument652 SeitenHumanoid Robots Human-Like MachinesPRADEEP_P86% (7)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Oracle SQL Developer User GuideDokument194 SeitenOracle SQL Developer User Guidesureshreddy_iNoch keine Bewertungen
- RQM - P: Series 60 Subplate Mounting RQM3-P ISO 6264-06 RQM5-P ISO 6264-08 RQM7-P ISO 6264-10Dokument4 SeitenRQM - P: Series 60 Subplate Mounting RQM3-P ISO 6264-06 RQM5-P ISO 6264-08 RQM7-P ISO 6264-10Jorge MendozaNoch keine Bewertungen
- Planmeca Promax 3D Max CBVT Product PresentationDokument36 SeitenPlanmeca Promax 3D Max CBVT Product PresentationAD TwentyOne DentalNoch keine Bewertungen
- 10th Syllbus PDFDokument104 Seiten10th Syllbus PDFGagandeep KaurNoch keine Bewertungen
- V Packing SealDokument10 SeitenV Packing SealBobby ArbianugrohoNoch keine Bewertungen
- Nursery Car Seat Supplement 2023Dokument40 SeitenNursery Car Seat Supplement 2023doniNoch keine Bewertungen
- Oakite 61B - TIDokument2 SeitenOakite 61B - TI顏煥杰Noch keine Bewertungen
- TRANSLATIONDokument4 SeitenTRANSLATIONGarren Jude Aquino100% (1)
- Intelligent Building FacadeDokument32 SeitenIntelligent Building FacadeVeè Vêk JåyswãlNoch keine Bewertungen
- ITP FORMAT - PSV Modified FormateDokument1 SeiteITP FORMAT - PSV Modified Formatemurthy challapalliNoch keine Bewertungen
- Soal Pts GSL 8 - Inggris - JWBNDokument9 SeitenSoal Pts GSL 8 - Inggris - JWBNRindah Tiara SariNoch keine Bewertungen
- Las-Shs Gen - Chem Melc 1 q2 Week-1Dokument11 SeitenLas-Shs Gen - Chem Melc 1 q2 Week-1Carl Baytola RatesNoch keine Bewertungen
- Cn101386595-Chemical Synthesis Method of 10-Methoxyl-5H-Dibenz (B, F) AzapineDokument4 SeitenCn101386595-Chemical Synthesis Method of 10-Methoxyl-5H-Dibenz (B, F) AzapineDipti DodiyaNoch keine Bewertungen
- ARCO ANDI Wayne PIB Installation and Start Up GuideDokument39 SeitenARCO ANDI Wayne PIB Installation and Start Up GuidejotazunigaNoch keine Bewertungen
- Risk Management Q1Dokument8 SeitenRisk Management Q1Parth MuniNoch keine Bewertungen
- Vichinsky Et Al.2019Dokument11 SeitenVichinsky Et Al.2019Kuliah Semester 4Noch keine Bewertungen
- 2.talent Management New ChallengesDokument17 Seiten2.talent Management New ChallengesAlejandra AGNoch keine Bewertungen
- Altium Rigid Flex GuidebookDokument40 SeitenAltium Rigid Flex GuidebookKiran Jot Singh100% (1)
- Czujniki Temperatury MOTOMETERDokument7 SeitenCzujniki Temperatury MOTOMETERhelp3rNoch keine Bewertungen
- Haggling As A Socio-Pragmatic Strategy (A Case Study of Idumota Market)Dokument15 SeitenHaggling As A Socio-Pragmatic Strategy (A Case Study of Idumota Market)Oshoja Tolulope OlalekanNoch keine Bewertungen
- Technical Seminar Report CV94Dokument62 SeitenTechnical Seminar Report CV941MS19CV053 KARTHIK B SNoch keine Bewertungen
- Module 1-Grade 9Dokument19 SeitenModule 1-Grade 9Charity NavarroNoch keine Bewertungen
- Collimation of Binoculars With A LampDokument33 SeitenCollimation of Binoculars With A LampchristianNoch keine Bewertungen
- 3 Master Star 1 Super Star: Forged Steel Ball ValvesDokument7 Seiten3 Master Star 1 Super Star: Forged Steel Ball ValvesAhmed IbrahimNoch keine Bewertungen
- Deep Face Lab PDFDokument29 SeitenDeep Face Lab PDFHenry MorenoNoch keine Bewertungen
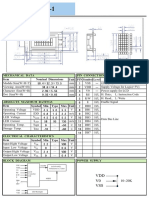
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDokument1 SeiteV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNoch keine Bewertungen
- PDF EnglishDokument36 SeitenPDF EnglishSanti CheewabantherngNoch keine Bewertungen
- Inventory Counting in Inventory ManagementDokument15 SeitenInventory Counting in Inventory ManagementDinesh GuptaNoch keine Bewertungen
- Chapter 1 To7 With Course OutlineDokument34 SeitenChapter 1 To7 With Course Outlinerk_kamatchi3483Noch keine Bewertungen
- Welding SymbolDokument8 SeitenWelding SymbolMuhammad Cahya Adi PNoch keine Bewertungen