Das könnte Ihnen auch gefallen
- Automotive Electronic Diagnostics (Course 2)Von EverandAutomotive Electronic Diagnostics (Course 2)Bewertung: 4 von 5 Sternen4/5 (2)
- Fluke - Troubleshooting Auto Electrical SystemsDokument23 SeitenFluke - Troubleshooting Auto Electrical SystemsWesley YoungNoch keine Bewertungen
- Introduction to the simulation of power plants for EBSILON®Professional Version 15Von EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Noch keine Bewertungen
- Environment Quiz - Climate Change and Global WarmingDokument2 SeitenEnvironment Quiz - Climate Change and Global Warmingbhingmeh yotal100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Secrets of Punching Power: An Introduction To Power MechanicsDokument12 SeitenSecrets of Punching Power: An Introduction To Power MechanicsMike Blesch100% (10)
- Cascadia PrtPak 09AUG13Dokument44 SeitenCascadia PrtPak 09AUG13Raul LunaNoch keine Bewertungen
- Pump User Instructions M SlurryDokument60 SeitenPump User Instructions M SlurryAndhika Bani Gunawan0% (1)
- Aybey Ax ManualDokument14 SeitenAybey Ax ManualSuleman Amjad75% (4)
- Steady Flow in Pipes: BTB 323/ Cse 352 Hydraulics Edwin K. Kanda, PHDDokument19 SeitenSteady Flow in Pipes: BTB 323/ Cse 352 Hydraulics Edwin K. Kanda, PHDErick WanduNoch keine Bewertungen
- Sample Answer AE06Dokument7 SeitenSample Answer AE06wei foo80% (20)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Digital LED Thermometer with Microcontroller AVR ATtiny13Von EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Bewertung: 5 von 5 Sternen5/5 (1)
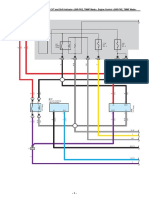
- Cruise Control, CVT and Shift Indicator, Engine ControlDokument27 SeitenCruise Control, CVT and Shift Indicator, Engine ControlRicardoNoch keine Bewertungen
- Battery Management System (BMS) EE401 Final ReportDokument26 SeitenBattery Management System (BMS) EE401 Final ReportOzgur M. DumanNoch keine Bewertungen
- 01 Stress PDFDokument81 Seiten01 Stress PDFMuhammad Nur IkhwanNoch keine Bewertungen
- Manual GenconDokument97 SeitenManual GenconBruno MarianoNoch keine Bewertungen
- Definition of Terms - Plumbing2Dokument15 SeitenDefinition of Terms - Plumbing2Gels GenovaNoch keine Bewertungen
- Fundamentals of HV Circuit-BreakersDokument22 SeitenFundamentals of HV Circuit-BreakersBastian OspinaNoch keine Bewertungen
- 3 Phase Handbook ATS 1.1 Issue 3Dokument23 Seiten3 Phase Handbook ATS 1.1 Issue 3yorgo7002100% (2)
- Load SensorDokument11 SeitenLoad Sensorabdul100% (2)
- 3 Phase Auto Change Over SwitchDokument23 Seiten3 Phase Auto Change Over Switchajaykeshav100% (3)
- Single Line Diagrams PDFDokument14 SeitenSingle Line Diagrams PDFBattinapati Shiva60% (5)
- Pid Without A PHD PDFDokument14 SeitenPid Without A PHD PDFGiovanni Eliezer100% (2)
- Basics of ProtectionDokument183 SeitenBasics of Protectionsushmitha100% (1)
- Subtle Biology - The Web of Life - John DavidsonDokument5 SeitenSubtle Biology - The Web of Life - John DavidsonJohn Davidson100% (1)
- ENG Connecting DEC To MErcedes m102Dokument3 SeitenENG Connecting DEC To MErcedes m102Vincent RenaNoch keine Bewertungen
- Power World SimulatorDokument8 SeitenPower World Simulatorgirish19Noch keine Bewertungen
- GM328A User ManualDokument3 SeitenGM328A User ManualRosu Eugen100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Solar Regulator 30A 12V24V ManualDokument2 SeitenSolar Regulator 30A 12V24V ManualChristian Tha Ox86% (7)
- PLC Basicsand Ladder Programming-2Dokument86 SeitenPLC Basicsand Ladder Programming-2Ifradmanorama Papabeta2611Noch keine Bewertungen
- Procedure:: Machines Laboratory - 5Dokument4 SeitenProcedure:: Machines Laboratory - 5naserhashemniaNoch keine Bewertungen
- Green EnergyDokument13 SeitenGreen EnergyAlin ÒóNoch keine Bewertungen
- Lab 6 Separately Excited DC MotorDokument5 SeitenLab 6 Separately Excited DC MotorMalik ZaidNoch keine Bewertungen
- Design of An Antenna Azimuth Position Control SystemDokument12 SeitenDesign of An Antenna Azimuth Position Control SystemUche PaulNoch keine Bewertungen
- Exp 7Dokument11 SeitenExp 7John Renzel RiveraNoch keine Bewertungen
- MES 2 ModuleDokument14 SeitenMES 2 ModuleAbah Hafiz Hadif100% (1)
- Project 3 MotorDokument22 SeitenProject 3 MotorJagadeesh k v JagadeeshNoch keine Bewertungen
- (Rev) Lab Activity 3Dokument6 Seiten(Rev) Lab Activity 3MitzOsorioNoch keine Bewertungen
- Mastech MS2203 ManualDokument35 SeitenMastech MS2203 ManualaleksandarlaskovNoch keine Bewertungen
- Motor CircuitsDokument19 SeitenMotor CircuitsSzalma ÁrpádNoch keine Bewertungen
- DL 30130 - Extract From The ManualDokument6 SeitenDL 30130 - Extract From The ManuallpestanaNoch keine Bewertungen
- PROCEDUREDokument2 SeitenPROCEDUREProNooBNoch keine Bewertungen
- Practical Exam DiagramDokument6 SeitenPractical Exam DiagramVallery Dela CruzNoch keine Bewertungen
- MS2203 Power Clamp Meter English ManualDokument35 SeitenMS2203 Power Clamp Meter English ManualgcninstalNoch keine Bewertungen
- Dkg-207 Amf and Remote Start Unit Installation and Operating InstructionsDokument4 SeitenDkg-207 Amf and Remote Start Unit Installation and Operating InstructionsBambang Ardiansyah SetiadyNoch keine Bewertungen
- Control Theory MaterialDokument18 SeitenControl Theory MaterialalwaysharshNoch keine Bewertungen
- EE 340L - Experiment 6: Synchronous Generator - Operation With The GridDokument6 SeitenEE 340L - Experiment 6: Synchronous Generator - Operation With The GridMuhammad Saad AbdullahNoch keine Bewertungen
- 1.2.1. Uso MultimetroDokument13 Seiten1.2.1. Uso MultimetroSamuel Gerardo AndericaNoch keine Bewertungen
- Airflow Meters Measure The Amount of Air Going Into The Engine This Is Used by The Ecu To Control The Amount of Fuel Used by The EngineDokument30 SeitenAirflow Meters Measure The Amount of Air Going Into The Engine This Is Used by The Ecu To Control The Amount of Fuel Used by The EngineJohn Gary WalfordNoch keine Bewertungen
- Catálogo FracoDokument42 SeitenCatálogo FracoOscar LomasNoch keine Bewertungen
- Induction Motor Lab ManualDokument11 SeitenInduction Motor Lab ManualRabah ZaimeddineNoch keine Bewertungen
- ELEC302 Lab10Dokument4 SeitenELEC302 Lab10Ashik AhmedNoch keine Bewertungen
- 780USA INDEXcE1 PDFDokument21 Seiten780USA INDEXcE1 PDFThatchNoch keine Bewertungen
- CM5024Z, CM5048 User's ManualDokument4 SeitenCM5024Z, CM5048 User's Manualjean188450% (2)
- "Bridge B2HZ" For The Control of A DC MotorDokument16 Seiten"Bridge B2HZ" For The Control of A DC MotorhadiNoch keine Bewertungen
- Tài liệu về bộ chỉnh lực căng của hãng ZXtec dòng ZXT-B seriesDokument17 SeitenTài liệu về bộ chỉnh lực căng của hãng ZXtec dòng ZXT-B seriesNguyễn Văn DũngNoch keine Bewertungen
- C 2012 Naren VelezDokument19 SeitenC 2012 Naren Veleznayak_bibekumarNoch keine Bewertungen
- Pfr140 User ManualDokument4 SeitenPfr140 User ManualOanh NguyenNoch keine Bewertungen
- CISE 204 Digital System Design Lab Manual PDFDokument44 SeitenCISE 204 Digital System Design Lab Manual PDFEng-Mohammed KayedNoch keine Bewertungen
- Control Lab PDFDokument76 SeitenControl Lab PDFMohamed BenrahalNoch keine Bewertungen
- Manual Solarni Regulator Cm3024z 12 24v30a S LCDDokument7 SeitenManual Solarni Regulator Cm3024z 12 24v30a S LCDJaime Andres Villegas Mansilla100% (1)
- Electromechanical Systems SimulatorDokument18 SeitenElectromechanical Systems SimulatorLuis Wilber Humpiri VelasquezNoch keine Bewertungen
- Power Lab Report 12Dokument8 SeitenPower Lab Report 12Ali ShanNoch keine Bewertungen
- User Manual: Second EditionDokument15 SeitenUser Manual: Second EditionDennis XenosNoch keine Bewertungen
- Objectives:: Experiment 7 Open & Closed Loop SystemsDokument5 SeitenObjectives:: Experiment 7 Open & Closed Loop SystemsHennesey LouriceNoch keine Bewertungen
- Proy. Electrónico DC Power MeterDokument20 SeitenProy. Electrónico DC Power Metervpol25Noch keine Bewertungen
- PFR96/PFR96P: A Brief OverviewDokument4 SeitenPFR96/PFR96P: A Brief Overviewkachada22Noch keine Bewertungen
- PID Without A PHDDokument16 SeitenPID Without A PHDirfanexpertNoch keine Bewertungen
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsVon EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNoch keine Bewertungen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Wi MAXDokument10 SeitenWi MAXSenthilathiban ThevarasaNoch keine Bewertungen
- Transformers AutomationType CatalogPageDokument12 SeitenTransformers AutomationType CatalogPagekay_rolNoch keine Bewertungen
- UTPS15.001.05.11.91 Release Notes: Huawei Technologies Co., LTDDokument3 SeitenUTPS15.001.05.11.91 Release Notes: Huawei Technologies Co., LTDashasyraafNoch keine Bewertungen
- Blur The Line Between Work and Play: ConfidentialDokument3 SeitenBlur The Line Between Work and Play: Confidentialkay_rolNoch keine Bewertungen
- Gantt Chart Project Planning SampleDokument1 SeiteGantt Chart Project Planning Samplekay_rolNoch keine Bewertungen
- Additional Exercise - Unsymmetrical FaultDokument3 SeitenAdditional Exercise - Unsymmetrical Faultkay_rolNoch keine Bewertungen
- 1667Dokument9 Seiten1667kay_rolNoch keine Bewertungen
- 1667Dokument9 Seiten1667kay_rolNoch keine Bewertungen
- Lab 2Dokument7 SeitenLab 2kay_rolNoch keine Bewertungen
- Kit InstructwtererttionsDokument7 SeitenKit Instructwtererttionskay_rolNoch keine Bewertungen
- Power On (Resistive - InductiveDokument13 SeitenPower On (Resistive - Inductivekay_rolNoch keine Bewertungen
- Street Light Control: Innovative Light ControlDokument11 SeitenStreet Light Control: Innovative Light Controlkay_rolNoch keine Bewertungen
- 3e 2011 0707495 1Dokument92 Seiten3e 2011 0707495 1kay_rolNoch keine Bewertungen
- 1667Dokument9 Seiten1667kay_rolNoch keine Bewertungen
- Css Sahara 02 04 InstructionsDokument12 SeitenCss Sahara 02 04 Instructionsstelios_yuhas4576Noch keine Bewertungen
- Jeng JengDokument22 SeitenJeng Jengkay_rolNoch keine Bewertungen
- Chap 2 (1) - DC GeneratorDokument31 SeitenChap 2 (1) - DC Generatorkay_rol100% (1)
- Css Sahara 02 04 InstructionsDokument12 SeitenCss Sahara 02 04 Instructionsstelios_yuhas4576Noch keine Bewertungen
- Analysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2Dokument8 SeitenAnalysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2kay_rolNoch keine Bewertungen
- ELEN 141 Lab8B LabVolt Lab 22 Three Phase Watts, VARS, VADokument8 SeitenELEN 141 Lab8B LabVolt Lab 22 Three Phase Watts, VARS, VAkay_rolNoch keine Bewertungen
- PriceDokument2 SeitenPricekay_rolNoch keine Bewertungen
- EET203 Tutorial TimerDokument2 SeitenEET203 Tutorial Timerkay_rolNoch keine Bewertungen
- Synchronous Machines Question BankDokument10 SeitenSynchronous Machines Question BankelecenggNoch keine Bewertungen
- Technical Data Compressor: SC12CLDokument6 SeitenTechnical Data Compressor: SC12CLKokoNoch keine Bewertungen
- Encorp Group ServicesDokument26 SeitenEncorp Group ServicesVinay NowalNoch keine Bewertungen
- The Effect of Financial Development On Renewable Energy Consumption. A Panel Data ApproachDokument9 SeitenThe Effect of Financial Development On Renewable Energy Consumption. A Panel Data ApproachArnawan Hasibuan, ST., MT Arnawan Hasibuan, ST., MTNoch keine Bewertungen
- Manual de Utilizare Uscator Beko 8 KGDokument64 SeitenManual de Utilizare Uscator Beko 8 KGPerfectreviewNoch keine Bewertungen
- Fuel, Lubricants and Fluids: en-GBDokument59 SeitenFuel, Lubricants and Fluids: en-GBRuanNoch keine Bewertungen
- Fire Warden Monthly ChecklistDokument3 SeitenFire Warden Monthly ChecklistTichaona KwazvichasvikaNoch keine Bewertungen
- Ibc 2003Dokument10 SeitenIbc 2003MIKHA2014Noch keine Bewertungen
- Leyte Geothermal Power Progressive Employees UnionDokument3 SeitenLeyte Geothermal Power Progressive Employees Unionaags_06Noch keine Bewertungen
- TLP 2355Dokument16 SeitenTLP 2355teomondoNoch keine Bewertungen
- Start Practice Exam Test Questions Part 1 of The SeriesDokument155 SeitenStart Practice Exam Test Questions Part 1 of The SeriesNida Bagoyboy NatichoNoch keine Bewertungen
- Sunket Solar ProjectDokument23 SeitenSunket Solar ProjectJesse XiaNoch keine Bewertungen
- PE Electromagnetic Pump Unit PE GB T1101 01-02-182Dokument4 SeitenPE Electromagnetic Pump Unit PE GB T1101 01-02-182li geneNoch keine Bewertungen
- Electricity & MagnetismDokument39 SeitenElectricity & MagnetismAditya KumarNoch keine Bewertungen
- Calculation of Cold Store Refrigeration LoadDokument3 SeitenCalculation of Cold Store Refrigeration LoadChamara Chinthaka RanasingheNoch keine Bewertungen
- Mantenedor de Bateria LBC1206Dokument6 SeitenMantenedor de Bateria LBC1206YERKO OVIEDONoch keine Bewertungen
- G7Dokument21 SeitenG7Maame Ama FrempongNoch keine Bewertungen
- Survey Questionnaire On Transforming Recycled Cooking Oil Into A Sustainable Butane Alternative For Stove FuelDokument2 SeitenSurvey Questionnaire On Transforming Recycled Cooking Oil Into A Sustainable Butane Alternative For Stove Fueljohnphilipcornelio04Noch keine Bewertungen
- Speed Control of Separately Excited DC Motor Using Power Electronic ConverterDokument5 SeitenSpeed Control of Separately Excited DC Motor Using Power Electronic ConverterIJIERT-International Journal of Innovations in Engineering Research and Technology100% (1)
- GeneratePDF (1) - Proposal JU6H-UFDO - 144 HP@ 2100 RPMDokument11 SeitenGeneratePDF (1) - Proposal JU6H-UFDO - 144 HP@ 2100 RPMMaurilio Batista de LimaNoch keine Bewertungen
- EPA / CARB Locomotive Letter - Trade GroupsDokument3 SeitenEPA / CARB Locomotive Letter - Trade GroupsNick PopeNoch keine Bewertungen