Das könnte Ihnen auch gefallen
- Dutch Lady NK Present Isnin 1 C PDFDokument43 SeitenDutch Lady NK Present Isnin 1 C PDFAbdulaziz Farhan50% (2)
- Chap12 (3) 3Dokument65 SeitenChap12 (3) 3Vince HarrisNoch keine Bewertungen
- Dynamics Rectilinear - Continuous and ErraticDokument67 SeitenDynamics Rectilinear - Continuous and ErraticJJ EnzonNoch keine Bewertungen
- Check List Iso 17065 2012Dokument35 SeitenCheck List Iso 17065 2012Wahyuningsih JacobNoch keine Bewertungen
- Download: Coulomb Force (Static) Vocabulary: Prior Knowledge Questions (Do These BEFORE Using The Gizmo.)Dokument3 SeitenDownload: Coulomb Force (Static) Vocabulary: Prior Knowledge Questions (Do These BEFORE Using The Gizmo.)Xavier McCulloughNoch keine Bewertungen
- PE2113-Chapter 12 - Dynamics - Draft1Dokument115 SeitenPE2113-Chapter 12 - Dynamics - Draft1Mohammed AlkhalifaNoch keine Bewertungen
- Rigid Body Dynamics - Chap 12-14Dokument51 SeitenRigid Body Dynamics - Chap 12-14Na2ryNoch keine Bewertungen
- Curvilinear Motion and ProjectilesDokument15 SeitenCurvilinear Motion and ProjectilesAltammar1367% (3)
- Isu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotionDokument22 SeitenIsu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotioneysNoch keine Bewertungen
- Lecture 2 Curvilinear MotionDokument87 SeitenLecture 2 Curvilinear MotionDave CruzNoch keine Bewertungen
- Kinematics of Curved MotionDokument43 SeitenKinematics of Curved MotionBEYZA ÇAVUŞOĞLUNoch keine Bewertungen
- CURVILINEAR MOTION COMPONENTSDokument17 SeitenCURVILINEAR MOTION COMPONENTSSekut TawarNoch keine Bewertungen
- Week 9 KinematicsDokument64 SeitenWeek 9 Kinematicsiwhy_Noch keine Bewertungen
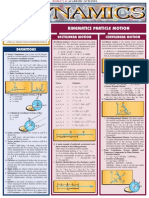
- Kinematics Particle MotionDokument10 SeitenKinematics Particle MotionStrider TeepeeNoch keine Bewertungen
- Dynamics PPT 1Dokument13 SeitenDynamics PPT 1qurriyatus zahroNoch keine Bewertungen
- Kinematics: Iit-Physics - Set - IDokument50 SeitenKinematics: Iit-Physics - Set - IHemant KumarNoch keine Bewertungen
- SN Sec 12-4 12-5Dokument19 SeitenSN Sec 12-4 12-5bigbangmelvanNoch keine Bewertungen
- Curvilinear Motion: Normal & Tangential ComponentsDokument7 SeitenCurvilinear Motion: Normal & Tangential ComponentsNaqib NordinNoch keine Bewertungen
- Curvilinear Motion ComponentsDokument28 SeitenCurvilinear Motion ComponentsMohamed DamraNoch keine Bewertungen
- ME 230 Kinematics and Dynamics Lecture NotesDokument105 SeitenME 230 Kinematics and Dynamics Lecture NotesKhyzer HayyatNoch keine Bewertungen
- Dynamics - Quick Reference SheetDokument4 SeitenDynamics - Quick Reference Sheetmech118Noch keine Bewertungen
- Dynamics Chapter 12Dokument26 SeitenDynamics Chapter 12Sudarshan KambleNoch keine Bewertungen
- Kinematics of Particle MotionDokument75 SeitenKinematics of Particle MotionMuhammad Ahmad Khan LodhiNoch keine Bewertungen
- Kinematics of particles motion and equationsDokument160 SeitenKinematics of particles motion and equationsaychiluhimhailuNoch keine Bewertungen
- Curvilinear Motion: Rectangular Components Projectiles (Sections 12.4-12.6)Dokument34 SeitenCurvilinear Motion: Rectangular Components Projectiles (Sections 12.4-12.6)Mohamed DamraNoch keine Bewertungen
- Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionDokument41 SeitenDynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionJJ Enzon100% (1)
- Kinematics Fundamentals: Position, Velocity, AccelerationDokument18 SeitenKinematics Fundamentals: Position, Velocity, AccelerationSaad AhmadNoch keine Bewertungen
- Dynamics: Lesson OutcomesDokument7 SeitenDynamics: Lesson OutcomesNaqib NordinNoch keine Bewertungen
- 2.1 Rectilinear MotionDokument13 Seiten2.1 Rectilinear MotionDaniel HaiqalNoch keine Bewertungen
- Kinematics of Rigid Bodies MotionDokument48 SeitenKinematics of Rigid Bodies MotionSilas LargosBalonesNoch keine Bewertungen
- Normal and Tangetial ComponentsDokument15 SeitenNormal and Tangetial Componentsgear101890Noch keine Bewertungen
- Rigid Body Dynamics AnalysisDokument22 SeitenRigid Body Dynamics AnalysisCllyan ReyesNoch keine Bewertungen
- Introduction & Rectilinear Kinematics: Continuous Motion: Today's ObjectivesDokument17 SeitenIntroduction & Rectilinear Kinematics: Continuous Motion: Today's Objectivesجعفر السلطانNoch keine Bewertungen
- Lect1 DynamicsDokument28 SeitenLect1 Dynamicsأميرول فاروقاNoch keine Bewertungen
- 1.3 Curvilinear MotionDokument52 Seiten1.3 Curvilinear MotionKaren MenesesNoch keine Bewertungen
- Introduction & Rectilinear Kinematics: CONTINUOUS MOTION (Sections 12.1 - 12.2)Dokument15 SeitenIntroduction & Rectilinear Kinematics: CONTINUOUS MOTION (Sections 12.1 - 12.2)Mohamed DamraNoch keine Bewertungen
- Motion in Two DimensionDokument26 SeitenMotion in Two DimensionKnowledgeIsTruePowerNoch keine Bewertungen
- 12.1) Introduction & Rectilinear Kinematics: Continuous MotionDokument13 Seiten12.1) Introduction & Rectilinear Kinematics: Continuous MotionSalim Bin AgilNoch keine Bewertungen
- Dynamica Mehanika DDDDDDDDDFFFDokument57 SeitenDynamica Mehanika DDDDDDDDDFFFLeonard ReinaNoch keine Bewertungen
- Dynamics Lecture Accl-VelocityDokument18 SeitenDynamics Lecture Accl-VelocityAbhijeeth Nagaraj100% (4)
- 01 - Kinematics of A Particle 1Dokument26 Seiten01 - Kinematics of A Particle 1MPRajNoch keine Bewertungen
- Kinematics Lecture 1 ParticleDokument43 SeitenKinematics Lecture 1 ParticlethodatisampathNoch keine Bewertungen
- Kinema TikDokument29 SeitenKinema TikZinger IqraNoch keine Bewertungen
- Engineering Dynamics Lecture 3Dokument30 SeitenEngineering Dynamics Lecture 3Anokha LadlaNoch keine Bewertungen
- Circular MotionDokument8 SeitenCircular Motionganeshpranav963Noch keine Bewertungen
- PLANE CURVILINEAR MOTION AND PROJECTILE MOTIONDokument43 SeitenPLANE CURVILINEAR MOTION AND PROJECTILE MOTIONawethaf9876Noch keine Bewertungen
- Week 1 - DDokument16 SeitenWeek 1 - DBasit AliNoch keine Bewertungen
- Curvilinear Motion: Normal and Tangential Components: Today's ObjectivesDokument19 SeitenCurvilinear Motion: Normal and Tangential Components: Today's ObjectivesrdusfsdyifuyuNoch keine Bewertungen
- AP Math - 154-1Dokument42 SeitenAP Math - 154-1laurenemetcalfNoch keine Bewertungen
- Kinematics Using Vector Analysis: Standard CompetencyDokument18 SeitenKinematics Using Vector Analysis: Standard CompetencyYasheive saadiNoch keine Bewertungen
- 3 Curvilinear MotionDokument9 Seiten3 Curvilinear MotionPercival ArcherNoch keine Bewertungen
- Chapter 1 Part1Dokument116 SeitenChapter 1 Part1G00GLRNoch keine Bewertungen
- Mechanics For Engineers DYNAMICS ChapterDokument88 SeitenMechanics For Engineers DYNAMICS ChapterCarmela SacdalanNoch keine Bewertungen
- Lecture 1 Dynamics Malik Hassan GIKIDokument19 SeitenLecture 1 Dynamics Malik Hassan GIKIMuhammad AwaisNoch keine Bewertungen
- Iit Jee StudyDokument955 SeitenIit Jee StudyGarlapati Srinivasa Rao88% (17)
- Kinematics One Dimentional Mot. Nov 9 2020Dokument14 SeitenKinematics One Dimentional Mot. Nov 9 2020Golam RabbaniNoch keine Bewertungen
- Chapter 12 OneSlideDokument143 SeitenChapter 12 OneSlideSupper CoolNoch keine Bewertungen
- 1-Kinematics of Particles 0Dokument46 Seiten1-Kinematics of Particles 0Rabiatul AdawiahNoch keine Bewertungen
- Understanding Vector Calculus: Practical Development and Solved ProblemsVon EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNoch keine Bewertungen
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankVon EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNoch keine Bewertungen
- BQMS Preview PDFDokument41 SeitenBQMS Preview PDFFrancesco De BellisNoch keine Bewertungen
- Paper Title Name: First Author Name, Second Author Name, Third Author NameDokument4 SeitenPaper Title Name: First Author Name, Second Author Name, Third Author NameK V BALARAMAKRISHNANoch keine Bewertungen
- 347 953 1 SMDokument14 Seiten347 953 1 SMMuhammad Faiz HarunNoch keine Bewertungen
- Quality Management System For Micro and Small EnterprisesDokument15 SeitenQuality Management System For Micro and Small EnterprisesAbdulaziz FarhanNoch keine Bewertungen
- Somaliland Election 2017Dokument12 SeitenSomaliland Election 2017Abdulaziz FarhanNoch keine Bewertungen
- FactorAnalysis - APA - Varied DataDokument19 SeitenFactorAnalysis - APA - Varied DataAbdulaziz FarhanNoch keine Bewertungen
- 2011-0021 22 Research MethodologyDokument18 Seiten2011-0021 22 Research Methodologyahmedbalo100% (1)
- Relation Between Manual Rotation and Abductive Reasoning in Q MethodologyDokument7 SeitenRelation Between Manual Rotation and Abductive Reasoning in Q MethodologyAbdulaziz FarhanNoch keine Bewertungen
- Design of Milling Cutters1Dokument67 SeitenDesign of Milling Cutters1Ebrahim Abdullah HanashNoch keine Bewertungen
- How Are Polls Conducted FINALDokument4 SeitenHow Are Polls Conducted FINALcsteinmetz1Noch keine Bewertungen
- How Are Polls Conducted FINALDokument4 SeitenHow Are Polls Conducted FINALcsteinmetz1Noch keine Bewertungen
- G1814027 AlawiDokument19 SeitenG1814027 AlawiAbdulaziz FarhanNoch keine Bewertungen
- G1814027 AlawiDokument19 SeitenG1814027 AlawiAbdulaziz FarhanNoch keine Bewertungen
- Presentation2 MPCSDokument3 SeitenPresentation2 MPCSAbdulaziz FarhanNoch keine Bewertungen
- Somaliland Election 2017Dokument12 SeitenSomaliland Election 2017Abdulaziz FarhanNoch keine Bewertungen
- 01 Intro To Instrumentation and MeasurementDokument21 Seiten01 Intro To Instrumentation and MeasurementAbdulaziz FarhanNoch keine Bewertungen
- EX#1lab ReportDokument8 SeitenEX#1lab ReportAbdulaziz FarhanNoch keine Bewertungen
- Abrasive Jet MachiningDokument96 SeitenAbrasive Jet MachiningAbdulaziz FarhanNoch keine Bewertungen
- Challanges of TechnologyDokument5 SeitenChallanges of TechnologyAbdulaziz FarhanNoch keine Bewertungen
- Tool WearDokument9 SeitenTool WearAbdulaziz FarhanNoch keine Bewertungen
- Effect of Temperature On Abrasive MachiningDokument11 SeitenEffect of Temperature On Abrasive MachiningAbdulaziz FarhanNoch keine Bewertungen
- Machining Guide for Broaching ProcessesDokument35 SeitenMachining Guide for Broaching ProcessesAbdulaziz FarhanNoch keine Bewertungen
- 1-Introduction of Material ScienceDokument29 Seiten1-Introduction of Material ScienceAbdulaziz FarhanNoch keine Bewertungen
- Effect of High Cutting TemperatureDokument3 SeitenEffect of High Cutting TemperatureAbdulaziz FarhanNoch keine Bewertungen
- Notice On The Issuance of Preliminary Exam Time-Table For Sem 1 - 20122013 (UG)Dokument3 SeitenNotice On The Issuance of Preliminary Exam Time-Table For Sem 1 - 20122013 (UG)Abdulaziz FarhanNoch keine Bewertungen
- Chemistry Course OutlineDokument12 SeitenChemistry Course OutlineAbdulaziz FarhanNoch keine Bewertungen
- Kinematics of Rigid Bodies1Dokument109 SeitenKinematics of Rigid Bodies1Clackfuik12Noch keine Bewertungen
- JEE Main Laws of Motion Revision Notes - Free PDF DownloadDokument6 SeitenJEE Main Laws of Motion Revision Notes - Free PDF DownloadSHUBHAM KUMARNoch keine Bewertungen
- Physics STPM Past Year Questions With Answer 2007Dokument0 SeitenPhysics STPM Past Year Questions With Answer 2007Audra HendersonNoch keine Bewertungen
- Course Description: Ce223G-Jza DynamicsDokument31 SeitenCourse Description: Ce223G-Jza Dynamicsmayka mawrinNoch keine Bewertungen
- MotionDokument2 SeitenMotionJacobNoch keine Bewertungen
- EEET2099/ EEET2338: Variable Speed Drives: Lecture 2: DC Motor Dynamic OperationDokument25 SeitenEEET2099/ EEET2338: Variable Speed Drives: Lecture 2: DC Motor Dynamic OperationMuhammad SherazNoch keine Bewertungen
- Rigid Body Motion: Angular Momentum and TorqueDokument31 SeitenRigid Body Motion: Angular Momentum and TorqueGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Kinematics: Graphs and EquationsDokument13 SeitenKinematics: Graphs and EquationsJason YuNoch keine Bewertungen
- Chapter 11Dokument13 SeitenChapter 11rashid744Noch keine Bewertungen
- Electrostatics: Electrostatics Electric Current ElectromagnetismDokument4 SeitenElectrostatics: Electrostatics Electric Current ElectromagnetismBorisNoch keine Bewertungen
- Moving Charges and Magnetism RestoredDokument46 SeitenMoving Charges and Magnetism RestoredHarikrishnan NamboothiriNoch keine Bewertungen
- AP Workbook 4-G-2Dokument3 SeitenAP Workbook 4-G-2Steve PeraltaNoch keine Bewertungen
- ME 230 Dynamics Syllabus and Instructor InfoDokument3 SeitenME 230 Dynamics Syllabus and Instructor InfosushiriceboiNoch keine Bewertungen
- NASA: Calculation1Dokument2 SeitenNASA: Calculation1NASAdocumentsNoch keine Bewertungen
- Gearless Traction Machine NV41K SeriesDokument5 SeitenGearless Traction Machine NV41K SeriesFausto MoyaNoch keine Bewertungen
- Force and MotionDokument115 SeitenForce and MotionMyra Ramirez Ramos90% (10)
- Libertad National High School Science 8 Exam ReviewDokument3 SeitenLibertad National High School Science 8 Exam ReviewIngrid Joy S. CaburatanNoch keine Bewertungen
- Moment of Inertia and Angular AccelerationDokument5 SeitenMoment of Inertia and Angular AccelerationJose GalvanNoch keine Bewertungen
- Laws of Motion - NewtonDokument17 SeitenLaws of Motion - NewtonpseudonimNoch keine Bewertungen
- 26 Module 26 - Q1-General Physics 1Dokument19 Seiten26 Module 26 - Q1-General Physics 1zamora pegafiNoch keine Bewertungen
- Problems 44Dokument12 SeitenProblems 44Alvien HidayatNoch keine Bewertungen
- 1 .2013 El Force and El Field Hw-PracticeDokument12 Seiten1 .2013 El Force and El Field Hw-PracticerbgrossNoch keine Bewertungen
- Balancing of Rotating MassesDokument9 SeitenBalancing of Rotating MassesEricNoch keine Bewertungen
- Crash Test For Chapter 5 To 7Dokument5 SeitenCrash Test For Chapter 5 To 7Kamran AliNoch keine Bewertungen
- Describe The Motion Graph - Find The Distance Travel by The Object-Find The Displacement of The ObjectDokument2 SeitenDescribe The Motion Graph - Find The Distance Travel by The Object-Find The Displacement of The ObjectAjwad GhaliNoch keine Bewertungen
- Chapter 31Dokument22 SeitenChapter 31OmarWaelNoch keine Bewertungen
- Radiopharmaceuticals Guide to Half-Lives & Medical UsesDokument31 SeitenRadiopharmaceuticals Guide to Half-Lives & Medical UsesGail AidNoch keine Bewertungen
- PHYSICS - 10th - Test 2 - Google Forms Advit PDFDokument12 SeitenPHYSICS - 10th - Test 2 - Google Forms Advit PDFManoj GuptaNoch keine Bewertungen