Das könnte Ihnen auch gefallen
- Prueba Tecnico PedagogicaDokument24 SeitenPrueba Tecnico PedagogicaAndres Felipe Mendoza ObandoNoch keine Bewertungen
- Latinoamericana11 (1) 5Dokument22 SeitenLatinoamericana11 (1) 5Ricardo ParraNoch keine Bewertungen
- Osciloscopio CompletoDokument115 SeitenOsciloscopio CompletodfjarNoch keine Bewertungen
- Mto. Preventivo de Motores DieselDokument5 SeitenMto. Preventivo de Motores DieselRicardo ParraNoch keine Bewertungen
- Manual Sistemas Motor Diesel Combustible PrecalentamientoDokument9 SeitenManual Sistemas Motor Diesel Combustible PrecalentamientoJuan Manuel Fernandez MirandaNoch keine Bewertungen
- Electronica AutomotrizDokument264 SeitenElectronica AutomotrizHéctor Fidel Chire Ramírez98% (43)
- Altitud Versus PresionDokument1 SeiteAltitud Versus PresionRicardo ParraNoch keine Bewertungen
- JAIponencia 2Dokument43 SeitenJAIponencia 2Ricardo ParraNoch keine Bewertungen
- Bombas Datos TécnicosDokument8 SeitenBombas Datos Técnicosua033678100% (1)
- Cajas CVT y ConvertidoresDokument10 SeitenCajas CVT y ConvertidoresRicardo ParraNoch keine Bewertungen
- Cajas CVT y ConvertidoresDokument10 SeitenCajas CVT y ConvertidoresRicardo ParraNoch keine Bewertungen
- PresentaciónGNCV PpsDokument111 SeitenPresentaciónGNCV PpsRicardo Parra100% (1)
- Conceptosdealineacinybalanceoautomotriz 140625182253 Phpapp01Dokument14 SeitenConceptosdealineacinybalanceoautomotriz 140625182253 Phpapp01Ricardo ParraNoch keine Bewertungen
- ERJ151 (1) Localizacion Componentes PDFDokument24 SeitenERJ151 (1) Localizacion Componentes PDFRicardo ParraNoch keine Bewertungen
- PresentaciónGNCV PDFDokument56 SeitenPresentaciónGNCV PDFRicardo Parra100% (1)
- Manual Mecanica Automotriz Bombas Lineales Simples DoblesDokument22 SeitenManual Mecanica Automotriz Bombas Lineales Simples DoblesRicardo ParraNoch keine Bewertungen
- Manual Mecanica Automotriz Bombas Lineales Simples DoblesDokument22 SeitenManual Mecanica Automotriz Bombas Lineales Simples DoblesRicardo ParraNoch keine Bewertungen
- ERJ012 (1) AlternadorDokument4 SeitenERJ012 (1) AlternadorRicardo ParraNoch keine Bewertungen
- Tabla de ContenidoDokument4 SeitenTabla de ContenidoRicardo ParraNoch keine Bewertungen
- ERJ151 (1) Localizacion ComponentesDokument24 SeitenERJ151 (1) Localizacion ComponentesRicardo ParraNoch keine Bewertungen
- Análisis FallasDokument72 SeitenAnálisis FallasmanuelmanriqueNoch keine Bewertungen
- Manuales de carrozasDokument419 SeitenManuales de carrozasRicardo Parra92% (13)
- Practica de Laboratorio No 1Dokument3 SeitenPractica de Laboratorio No 1Ricardo ParraNoch keine Bewertungen
- Programa de Formación Mecatronica V102 PDFDokument47 SeitenPrograma de Formación Mecatronica V102 PDFRicardo Parra100% (1)
- Modulo Fisica de Semi Conduct OresDokument138 SeitenModulo Fisica de Semi Conduct OresisenambusNoch keine Bewertungen
- Diagrama y Despiece Aveo Kalos Barina Swift+Dokument530 SeitenDiagrama y Despiece Aveo Kalos Barina Swift+Nilcar Del Valle Montaner83% (6)
- Composiscion Del AireDokument48 SeitenComposiscion Del AireRicardo ParraNoch keine Bewertungen
- Seguridad Taller MecanicoDokument124 SeitenSeguridad Taller MecanicoFreddy Males SantosNoch keine Bewertungen
- Manual Sistemas Motor Diesel Combustible PrecalentamientoDokument9 SeitenManual Sistemas Motor Diesel Combustible PrecalentamientoJuan Manuel Fernandez MirandaNoch keine Bewertungen
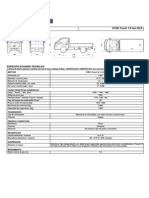
- H100 Truck 1ton PDFDokument1 SeiteH100 Truck 1ton PDFRicardo ParraNoch keine Bewertungen
- Introducción al análisis básico de circuitos eléctricosDokument49 SeitenIntroducción al análisis básico de circuitos eléctricosFranklin RamirezNoch keine Bewertungen
- Modelos Mentales G 5 2Dokument33 SeitenModelos Mentales G 5 2MN CCNoch keine Bewertungen
- de acuerdo a lo solicitado y cumple con optimizar el título para motores de búsquDokument90 Seitende acuerdo a lo solicitado y cumple con optimizar el título para motores de búsquHerwin mNoch keine Bewertungen
- POSICIONES Y MOVIMIENTOS SISTÉMICAS - F. Constelaciones en Consulta - Jonàs GnanaDokument16 SeitenPOSICIONES Y MOVIMIENTOS SISTÉMICAS - F. Constelaciones en Consulta - Jonàs Gnanaclaudia gonzalezNoch keine Bewertungen
- Informe 3Dokument4 SeitenInforme 3Dome VelardeNoch keine Bewertungen
- El Cáncer Desde La Perspectiva de La PsiconeuroinmunologiaDokument17 SeitenEl Cáncer Desde La Perspectiva de La Psiconeuroinmunologiaquintero158Noch keine Bewertungen
- SEGDDokument27 SeitenSEGDPablo kovaNoch keine Bewertungen
- Final BNDokument4 SeitenFinal BNandres penaNoch keine Bewertungen
- Cuadernillo de SilabasDokument163 SeitenCuadernillo de Silabasnereida diaz100% (1)
- Memoria DescriptivaDokument37 SeitenMemoria Descriptivayamilet839Noch keine Bewertungen
- SOLDADURADokument27 SeitenSOLDADURAEddy RolanNoch keine Bewertungen
- Brotzman Rehabilitacion en Ortopedia ClinicaDokument629 SeitenBrotzman Rehabilitacion en Ortopedia ClinicaLuis Rodriguez100% (1)
- ExtrucionDokument10 SeitenExtrucionMILI AMUNDARAYNoch keine Bewertungen
- Clasificación y características geométricas de carreterasDokument17 SeitenClasificación y características geométricas de carreterasDiana Ramirez0% (1)
- Guia para Sustituir AlimentosDokument1 SeiteGuia para Sustituir AlimentosOmar Luna MoralesNoch keine Bewertungen
- Bioclimas de EspañaDokument7 SeitenBioclimas de EspañaFrancisco José García GonzálezNoch keine Bewertungen
- Xtract V 3 0 8Dokument72 SeitenXtract V 3 0 8Raul Madrigal Bravo100% (2)
- Formato Registro Aplicación Pintura.Dokument4 SeitenFormato Registro Aplicación Pintura.Carlos Alfredo Martínez BritoNoch keine Bewertungen
- Reproducción SexualDokument12 SeitenReproducción SexualJuanPerezNoch keine Bewertungen
- Manejo Manual de CargaDokument38 SeitenManejo Manual de CargaJean LatorreNoch keine Bewertungen
- Planeamiento y Control de La ProducciónDokument17 SeitenPlaneamiento y Control de La ProducciónMilagros Karina Calapuja QuispeNoch keine Bewertungen
- Aeropuerto de Berlín Willy BrandtDokument8 SeitenAeropuerto de Berlín Willy BrandtAna DCNoch keine Bewertungen
- Impacto Ambiental Semana 3Dokument7 SeitenImpacto Ambiental Semana 3Vanessa VegaNoch keine Bewertungen
- Monografia - Trastornos Metabolicos Del Recien NacidoDokument13 SeitenMonografia - Trastornos Metabolicos Del Recien NacidoEdward Escobar GarciaNoch keine Bewertungen
- Circulo CromáticoDokument3 SeitenCirculo CromáticoMarianoColombNoch keine Bewertungen
- Campaña Lustria Conquista Del Nuevo Mundo 2004 EsDokument20 SeitenCampaña Lustria Conquista Del Nuevo Mundo 2004 EsSylcred TVNoch keine Bewertungen
- ANDRAGOGIADokument13 SeitenANDRAGOGIAJosé Ponce TataNoch keine Bewertungen
- Libro Rojo de Flora AmenazadaDokument600 SeitenLibro Rojo de Flora AmenazadaJehan Ninon RiosNoch keine Bewertungen
- Precios máximos de gasolinas y diesel julio 2016Dokument35 SeitenPrecios máximos de gasolinas y diesel julio 2016Fernando Martinez BravoNoch keine Bewertungen
- Memorias SemiconductorasDokument2 SeitenMemorias SemiconductorasJose MartinezNoch keine Bewertungen