Das könnte Ihnen auch gefallen
- Violeau Boom SPH SubmissionDokument45 SeitenVioleau Boom SPH SubmissionAnonymous HijNGQtNNoch keine Bewertungen
- SPE-115526-MS-P Fracture Ballooning in Naturally Fractured Formations - Mechanism and Controlling FactorsDokument9 SeitenSPE-115526-MS-P Fracture Ballooning in Naturally Fractured Formations - Mechanism and Controlling Factorszouke2002100% (1)
- SPE-168967-MS Simulation of Coupled Hydraulic Fracturing Propagation and Gas Well Performance in Shale Gas ReservoirsDokument11 SeitenSPE-168967-MS Simulation of Coupled Hydraulic Fracturing Propagation and Gas Well Performance in Shale Gas Reservoirstomk2220Noch keine Bewertungen
- Numerical Simulation of Two-Phase Flow in Horizontal Pipe - R1Dokument18 SeitenNumerical Simulation of Two-Phase Flow in Horizontal Pipe - R1Erfanul Haque Al NahianNoch keine Bewertungen
- Experimental Measurements of Bubble Convection Models in Two-PhaseDokument9 SeitenExperimental Measurements of Bubble Convection Models in Two-PhaseStephany CamacaroNoch keine Bewertungen
- CFD Letters2Dokument20 SeitenCFD Letters2Eswaran MuthaiahNoch keine Bewertungen
- SPE 27343 Sand Production As A Viscoplastic Granular FlowDokument10 SeitenSPE 27343 Sand Production As A Viscoplastic Granular FlowMuhammad SyarifudinNoch keine Bewertungen
- Modeling IPRDokument19 SeitenModeling IPRfreelancer2earnNoch keine Bewertungen
- SPE 122594 Well Test Analysis in Naturally Fractured Gas Condensate Reservoirs Below Dew Point PressureDokument16 SeitenSPE 122594 Well Test Analysis in Naturally Fractured Gas Condensate Reservoirs Below Dew Point PressureGabriel EduardoNoch keine Bewertungen
- Tire Splash ModelingDokument10 SeitenTire Splash Modelingsaugat pandeyNoch keine Bewertungen
- Computed Transient Supercavitating Flow Over A ProjectileDokument14 SeitenComputed Transient Supercavitating Flow Over A ProjectileMNirooeiNoch keine Bewertungen
- Super-Cavitating Profiles For Ultra High Speed Hydrofoils: A Hybrid CFD Design ApproachDokument13 SeitenSuper-Cavitating Profiles For Ultra High Speed Hydrofoils: A Hybrid CFD Design ApproachMNirooeiNoch keine Bewertungen
- A Numerical Oil Spill Model Based On A Hybrid MethodDokument9 SeitenA Numerical Oil Spill Model Based On A Hybrid MethodMetehan ErdoğanNoch keine Bewertungen
- PPP Oil Numerical Auc06 EnispaDokument20 SeitenPPP Oil Numerical Auc06 EnispaMohammad BozorgnezhadNoch keine Bewertungen
- 1.1 Problem DefinitionDokument14 Seiten1.1 Problem DefinitionBoonme ChinnaboonNoch keine Bewertungen
- Experimental and Numerical Analyses of Sloshing Flows: Yonghwan KimDokument20 SeitenExperimental and Numerical Analyses of Sloshing Flows: Yonghwan KimloemannNoch keine Bewertungen
- R. Stability - Analysis - of - A - Direct-Operated - Seawater - HDokument12 SeitenR. Stability - Analysis - of - A - Direct-Operated - Seawater - HKatherine SiNoch keine Bewertungen
- PETSOC-2003-181-P - Using Decline Curves To Forecast Waterflooded Reservoris - Fundamentals and Field CasesDokument25 SeitenPETSOC-2003-181-P - Using Decline Curves To Forecast Waterflooded Reservoris - Fundamentals and Field CasesFranck IparraguirreNoch keine Bewertungen
- Referat Whipping DSPNDokument7 SeitenReferat Whipping DSPNernur ablachimNoch keine Bewertungen
- SPE 184996 A Fractional Flow Theory For Unstable Immiscible FloodsDokument17 SeitenSPE 184996 A Fractional Flow Theory For Unstable Immiscible Floodsk.leya424Noch keine Bewertungen
- On The Use of Air-Bubble Screens As Oil BarriersDokument8 SeitenOn The Use of Air-Bubble Screens As Oil BarriersmynameisjohnNoch keine Bewertungen
- Computational Study of Heavy Oil Production With Inflow Control DevicesDokument8 SeitenComputational Study of Heavy Oil Production With Inflow Control DevicesXagustNoch keine Bewertungen
- SPE 12895-1984-P.,Griffith - Multiphase Flow in Pipes PDFDokument7 SeitenSPE 12895-1984-P.,Griffith - Multiphase Flow in Pipes PDFGustavo Valle100% (1)
- Spe 29363 MSDokument11 SeitenSpe 29363 MSswaala4realNoch keine Bewertungen
- Numerical Study of Dam-Break Flow - Omid SeyedashrafDokument9 SeitenNumerical Study of Dam-Break Flow - Omid SeyedashrafseyedashrafNoch keine Bewertungen
- Spe 160889 MS PDFDokument13 SeitenSpe 160889 MS PDFNovatNoch keine Bewertungen
- 307王磊Dokument9 Seiten307王磊Emmanuel RoblesNoch keine Bewertungen
- Steel Catenary RisersDokument29 SeitenSteel Catenary RisersZadeh NormanNoch keine Bewertungen
- Wellbore Flow PerformanceDokument7 SeitenWellbore Flow PerformanceAhmad KoharNoch keine Bewertungen
- Mahdi Al Dawood, Azly Abdul Aziz, Zillur Rahim, Ahmed Al-Omair, and N.M. Anisur Rahman, Saudi AramcoDokument13 SeitenMahdi Al Dawood, Azly Abdul Aziz, Zillur Rahim, Ahmed Al-Omair, and N.M. Anisur Rahman, Saudi AramcoManuel LealNoch keine Bewertungen
- Gas Entrainment at A Propagating Slug Front: Ruben SchulkesDokument19 SeitenGas Entrainment at A Propagating Slug Front: Ruben SchulkesAzizNoch keine Bewertungen
- Ijret - Effect of Free Surface Wave On Free Vibration of A Floating PlatformDokument5 SeitenIjret - Effect of Free Surface Wave On Free Vibration of A Floating PlatformInternational Journal of Research in Engineering and TechnologyNoch keine Bewertungen
- Energies 13 05042 v2Dokument17 SeitenEnergies 13 05042 v2Nik FinNoch keine Bewertungen
- MARHY18 S26 Poonam Mohan PDFDokument8 SeitenMARHY18 S26 Poonam Mohan PDFPoonam MohanNoch keine Bewertungen
- The Flow Patterns in Two Immiscible Stratified Liquids Induced by Bubble PlumeDokument19 SeitenThe Flow Patterns in Two Immiscible Stratified Liquids Induced by Bubble PlumeDennisQuNoch keine Bewertungen
- Pressure Transient Well Testing Encountered ComplexitiesDokument12 SeitenPressure Transient Well Testing Encountered ComplexitiesBolsec14Noch keine Bewertungen
- Well-Control Operations in Horizontal Wells: O.L.A. SantosDokument7 SeitenWell-Control Operations in Horizontal Wells: O.L.A. SantosJulian Felipe Noguera CruzNoch keine Bewertungen
- Evaluation of Multiple Geostatistical Models Using Scaling-Up With Coarse Grids: A Practical StudyDokument16 SeitenEvaluation of Multiple Geostatistical Models Using Scaling-Up With Coarse Grids: A Practical Studypande_100Noch keine Bewertungen
- Research On The Cavitation Characteristic of Kaplan Turbine Under Sediment Flow ConditionDokument10 SeitenResearch On The Cavitation Characteristic of Kaplan Turbine Under Sediment Flow ConditionFabio FolpiniNoch keine Bewertungen
- Numerical Simulation For Droplets Formation Due To Breaking WaveDokument22 SeitenNumerical Simulation For Droplets Formation Due To Breaking WaveTung DangNoch keine Bewertungen
- Water: Numerical Simulation of Liquid Sloshing With Different Filling Levels Using Openfoam and Experimental ValidationDokument18 SeitenWater: Numerical Simulation of Liquid Sloshing With Different Filling Levels Using Openfoam and Experimental Validationcont contaNoch keine Bewertungen
- IPTC 16957 A Model For Wettability Alteration in Fractured ReservoirsDokument10 SeitenIPTC 16957 A Model For Wettability Alteration in Fractured Reservoirskpratik41Noch keine Bewertungen
- 17-Bergsma FSI Paper RevisedDokument10 Seiten17-Bergsma FSI Paper RevisedSunil Kumar P GNoch keine Bewertungen
- SPE-169004-MS Understanding Shale Performance: Performance Analysis Workflow With Analytical Models in Eagle Ford Shale PlayDokument15 SeitenSPE-169004-MS Understanding Shale Performance: Performance Analysis Workflow With Analytical Models in Eagle Ford Shale Playtomk2220Noch keine Bewertungen
- Introduction To Applied Reservoir Engineering: Es V Yb AsDokument18 SeitenIntroduction To Applied Reservoir Engineering: Es V Yb AsjhalendrafbNoch keine Bewertungen
- Fluid Sloshing in Diaphragm TanksDokument11 SeitenFluid Sloshing in Diaphragm TanksrenatobellarosaNoch keine Bewertungen
- Preprints201609 0007 v1Dokument14 SeitenPreprints201609 0007 v1Medardo TorresNoch keine Bewertungen
- SPE Analysis of Slug Test Data From Hydraulically Fractured Coalbed Methane WellsDokument14 SeitenSPE Analysis of Slug Test Data From Hydraulically Fractured Coalbed Methane WellsJuan Manuel ContrerasNoch keine Bewertungen
- Spe 125043 MS P PDFDokument18 SeitenSpe 125043 MS P PDFDamir986Noch keine Bewertungen
- SPE 153072 Production Data Analysis in Eagle Ford Shale Gas ReservoirDokument0 SeitenSPE 153072 Production Data Analysis in Eagle Ford Shale Gas ReservoirFernando Montes de OcaNoch keine Bewertungen
- Review of Froth Modelling in Steady State Flotation SystemsDokument25 SeitenReview of Froth Modelling in Steady State Flotation SystemsJuan OlivaresNoch keine Bewertungen
- Reactor Trickle BedDokument18 SeitenReactor Trickle BedCesarNoch keine Bewertungen
- Nagaraj PaperDokument7 SeitenNagaraj Paperknightfelix12Noch keine Bewertungen
- @conferencepaperbhr 2018229Dokument15 Seiten@conferencepaperbhr 2018229hahahahahaNoch keine Bewertungen
- Flow Over A CylinderDokument14 SeitenFlow Over A CylinderHariVathsalaNoch keine Bewertungen
- Calculating Liquid Distribution in Shake Flasks On Rotary Shaker at Waterlike ViscositiesDokument9 SeitenCalculating Liquid Distribution in Shake Flasks On Rotary Shaker at Waterlike Viscositiesokocha85Noch keine Bewertungen
- CFD Ball ValveDokument8 SeitenCFD Ball ValveKelvin Octavianus DjohanNoch keine Bewertungen
- Cavitation CFDDokument9 SeitenCavitation CFDTinyPavelNoch keine Bewertungen
- Marsh Funnel Testing For Rheology AnalysDokument11 SeitenMarsh Funnel Testing For Rheology AnalysFederico MalteseNoch keine Bewertungen
- A Quantitative Analysis Linking Seabird Mortality and Marine Debris IngestionDokument7 SeitenA Quantitative Analysis Linking Seabird Mortality and Marine Debris IngestionAnonymous HijNGQtNNoch keine Bewertungen
- Three Dimensional Smoothed Particle Hydrodynamics For Simulating Free Surface FlowsDokument9 SeitenThree Dimensional Smoothed Particle Hydrodynamics For Simulating Free Surface FlowsAnonymous HijNGQtNNoch keine Bewertungen
- PALOMBINI Occurrence and Recovery of Small-Sized Plastic Debris From A BrazilianDokument11 SeitenPALOMBINI Occurrence and Recovery of Small-Sized Plastic Debris From A BrazilianAnonymous HijNGQtNNoch keine Bewertungen
- PINCELLI Post-Consumer Plastic Packaging Waste Flow Analysis For Brazil - The Challenges Moving Towards A Circular EconomyDokument10 SeitenPINCELLI Post-Consumer Plastic Packaging Waste Flow Analysis For Brazil - The Challenges Moving Towards A Circular EconomyAnonymous HijNGQtNNoch keine Bewertungen
- 08 - A NOBRE What Remains On The Beach After Tourists Leave - The Case of Abaís Beach (Sergipe, Brazil)Dokument7 Seiten08 - A NOBRE What Remains On The Beach After Tourists Leave - The Case of Abaís Beach (Sergipe, Brazil)Anonymous HijNGQtNNoch keine Bewertungen
- Computational Particle MechanicsDokument34 SeitenComputational Particle MechanicsAnonymous HijNGQtNNoch keine Bewertungen
- Becb Online Oral PresentationDokument1 SeiteBecb Online Oral PresentationAnonymous HijNGQtNNoch keine Bewertungen
- Structure and New Substructure of Alpha Ti2O3 X-Ray Diffraction and Theoretical StudyDokument9 SeitenStructure and New Substructure of Alpha Ti2O3 X-Ray Diffraction and Theoretical StudyAnonymous HijNGQtNNoch keine Bewertungen
- CONFERENCE Abstracts 2021.8.11 UpdatedDokument66 SeitenCONFERENCE Abstracts 2021.8.11 UpdatedAnonymous HijNGQtNNoch keine Bewertungen
- Neighbour Lists For Smoothed Particle Hydrodynamics On GPUsDokument9 SeitenNeighbour Lists For Smoothed Particle Hydrodynamics On GPUsAnonymous HijNGQtNNoch keine Bewertungen
- 2005 Kirby Et Al FUNWAVE ModelFormulationsDokument86 Seiten2005 Kirby Et Al FUNWAVE ModelFormulationsAnonymous HijNGQtN100% (1)
- A Multi-Phase Particle Shifting AlgorithmDokument68 SeitenA Multi-Phase Particle Shifting AlgorithmAnonymous HijNGQtNNoch keine Bewertungen
- Interactive Fluid Flow Simulation in Computer Graphics Using Incompressible Smoothed Particle HydrodynamicsDokument17 SeitenInteractive Fluid Flow Simulation in Computer Graphics Using Incompressible Smoothed Particle HydrodynamicsAnonymous HijNGQtNNoch keine Bewertungen
- BECB 2021 - Online - Conference Program - 2021.7.25 - UpdatingDokument22 SeitenBECB 2021 - Online - Conference Program - 2021.7.25 - UpdatingAnonymous HijNGQtNNoch keine Bewertungen
- 29 DALRYMPLE ROGERS Numerical Modeling of Water Waves With The SPH Method.Dokument7 Seiten29 DALRYMPLE ROGERS Numerical Modeling of Water Waves With The SPH Method.Anonymous HijNGQtNNoch keine Bewertungen
- J. M. Haile Molecular Dynamics Simulation Elementary Methods 1992Dokument505 SeitenJ. M. Haile Molecular Dynamics Simulation Elementary Methods 1992Anonymous HijNGQtN100% (4)
- 24 SHAO Incompressible SPH Simulation of Water Entry ofDokument25 Seiten24 SHAO Incompressible SPH Simulation of Water Entry ofAnonymous HijNGQtNNoch keine Bewertungen
- Lag Rang Ian Technique of Smooth Particle HydrodynamicsDokument88 SeitenLag Rang Ian Technique of Smooth Particle Hydrodynamicsfmunir1Noch keine Bewertungen
- HX Example1 PDFDokument5 SeitenHX Example1 PDFSteveNoch keine Bewertungen
- Bowling Water Drops On Water SurfaceDokument7 SeitenBowling Water Drops On Water SurfacedNoch keine Bewertungen
- Branching Pipes: H Which We Shall Designate As HDokument17 SeitenBranching Pipes: H Which We Shall Designate As HUmer KhanNoch keine Bewertungen
- Wind Turbine PosterDokument1 SeiteWind Turbine PosterDhanu T ANoch keine Bewertungen
- Flu Jo MetroDokument4 SeitenFlu Jo Metrocarlos76Noch keine Bewertungen
- Topic 6 Reynolds Transport Theorem, Control Volume ApproachDokument41 SeitenTopic 6 Reynolds Transport Theorem, Control Volume ApproachMerwin Andrew UyNoch keine Bewertungen
- FMM Question BankDokument56 SeitenFMM Question BankSaravanan MathiNoch keine Bewertungen
- Lab Report 2Dokument5 SeitenLab Report 2api-402271945Noch keine Bewertungen
- Two-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormDokument7 SeitenTwo-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormElyas Nur FridayanaNoch keine Bewertungen
- Main Ngoài Ngáng DceDokument16 SeitenMain Ngoài Ngáng DceCao LanNoch keine Bewertungen
- Salami ValvesDokument41 SeitenSalami Valvescio tradeNoch keine Bewertungen
- Granco Flow Chart (50-100 Psi/Viscosities 32-1000 Ssu) Truck-Mounted PumpsDokument4 SeitenGranco Flow Chart (50-100 Psi/Viscosities 32-1000 Ssu) Truck-Mounted PumpsJose PinillaNoch keine Bewertungen
- White Paper Relief Load Calculations HYSYSDokument36 SeitenWhite Paper Relief Load Calculations HYSYSusman_hafeez86Noch keine Bewertungen
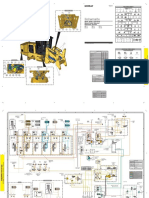
- 553C, 563C, and 573C Wheel Feller Buncher Hydraulic System: Front of Machine Behind CabDokument2 Seiten553C, 563C, and 573C Wheel Feller Buncher Hydraulic System: Front of Machine Behind Cabmrcruzito_2099Noch keine Bewertungen
- Kelvin-Helmholtz Instability and Roll-Up - ScholarpediaDokument7 SeitenKelvin-Helmholtz Instability and Roll-Up - ScholarpediaSanjay Kumar AdvaniNoch keine Bewertungen
- 2017 Chen3009 Chapter 1 Compressible Flow-StudentDokument38 Seiten2017 Chen3009 Chapter 1 Compressible Flow-StudentApple EmiratessNoch keine Bewertungen
- Experiment - 6: Cascade ControlDokument13 SeitenExperiment - 6: Cascade ControlMilan PoudelNoch keine Bewertungen
- 0.25 Marks X 40 MCQ 10 MarksDokument5 Seiten0.25 Marks X 40 MCQ 10 MarksNilNoch keine Bewertungen
- Catalog Serie LEMA 25 - 50Dokument8 SeitenCatalog Serie LEMA 25 - 50Lenin MisariNoch keine Bewertungen
- Area Classification of Flammable Mists: Summary of Joint-Industry Project FindingsDokument12 SeitenArea Classification of Flammable Mists: Summary of Joint-Industry Project FindingsSHAILENDRANoch keine Bewertungen
- Solution: Production Facility Design (Problems) Compiled by Muhammad Ahmed Pe-033Dokument26 SeitenSolution: Production Facility Design (Problems) Compiled by Muhammad Ahmed Pe-033Maisam Abbas100% (1)
- History of CFD Work in IndiaDokument10 SeitenHistory of CFD Work in IndiajoemonjacobNoch keine Bewertungen
- NSF MW 2015 Technical PapersDokument529 SeitenNSF MW 2015 Technical PapersWilfredo Porco EstradaNoch keine Bewertungen
- PERBANDINGAN PERHITUNGAN NILAI CVDokument2 SeitenPERBANDINGAN PERHITUNGAN NILAI CVRizki Herdhitama PutraNoch keine Bewertungen
- 3.fluid Flow PhenomenaDokument19 Seiten3.fluid Flow PhenomenaMAHLATSE MULALANoch keine Bewertungen
- BX 560GDokument20 SeitenBX 560Gmacanipharoldf6220Noch keine Bewertungen
- Design Optimization of Axial Hydraulic Turbine For Very Low Head Application 2015 Energy ProcediaDokument11 SeitenDesign Optimization of Axial Hydraulic Turbine For Very Low Head Application 2015 Energy ProcediaAgoeng NoegrossNoch keine Bewertungen
- GPM or GPH Flow Based On PVC Pipe SizeDokument3 SeitenGPM or GPH Flow Based On PVC Pipe SizeAziz Khan KakarNoch keine Bewertungen
- Submerged or A Floating Body That Is Only Partially SubmergedDokument13 SeitenSubmerged or A Floating Body That Is Only Partially SubmergedAiza AlbuferaNoch keine Bewertungen
- The Growth of A Cylinder Wake in Turbulent FlowDokument17 SeitenThe Growth of A Cylinder Wake in Turbulent FlowJayesh MahajanNoch keine Bewertungen