Das könnte Ihnen auch gefallen
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueVon EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueNoch keine Bewertungen
- Le Potentiel Interne Et Ses ApplicationsDokument32 SeitenLe Potentiel Interne Et Ses ApplicationsSatinNoch keine Bewertungen
- Fondations ProfondesDokument6 SeitenFondations ProfondesBabacar MbayeNoch keine Bewertungen
- Ossatures Souples Næuds Mobiles) : Rotations D'uneDokument20 SeitenOssatures Souples Næuds Mobiles) : Rotations D'uneKocouvi Agapi HouanouNoch keine Bewertungen
- Downloadfile 7Dokument6 SeitenDownloadfile 7HIMRI DOUNIA MALAKNoch keine Bewertungen
- TD5 RDM2Dokument3 SeitenTD5 RDM2MilanoNoch keine Bewertungen
- Béton - Justification de La Resistance D'un Mur de Soutenement PDFDokument25 SeitenBéton - Justification de La Resistance D'un Mur de Soutenement PDFS MNoch keine Bewertungen
- Memoire Sur PDFDokument144 SeitenMemoire Sur PDFDidier NchareNoch keine Bewertungen
- Symboles EC2Dokument21 SeitenSymboles EC2Mohamed Taher JebariNoch keine Bewertungen
- Dimensionnement Des PannesDokument11 SeitenDimensionnement Des PannesZeroualNoch keine Bewertungen
- 02-COURS BP CHapitre 2 - Technologie Des Systèmes PPT - EtudiantsDokument88 Seiten02-COURS BP CHapitre 2 - Technologie Des Systèmes PPT - EtudiantsMeissa BeyeNoch keine Bewertungen
- Mon RapportDokument42 SeitenMon RapportTerence Peteyr BaelishNoch keine Bewertungen
- Chapitre 6 Resistance Au Cisaillement Des Sols 06Dokument32 SeitenChapitre 6 Resistance Au Cisaillement Des Sols 06TOURENoch keine Bewertungen
- Etapes D'études D'un PontDokument2 SeitenEtapes D'études D'un PontWambié Nagaro100% (1)
- Notes1 Ouvrages SpeciauxDokument18 SeitenNotes1 Ouvrages Speciauxfadi eidNoch keine Bewertungen
- Cahier TP GEO 2 NDokument13 SeitenCahier TP GEO 2 NRania Ben HassineNoch keine Bewertungen
- Screenshot 2019-12-15 at 12.58.30Dokument2 SeitenScreenshot 2019-12-15 at 12.58.30Ayoub FekkoukiNoch keine Bewertungen
- Série N°05 - Fondations Superficielles PDFDokument3 SeitenSérie N°05 - Fondations Superficielles PDFel batoul mammouNoch keine Bewertungen
- TPE Barrage Voûte Et CrueDokument17 SeitenTPE Barrage Voûte Et CruevictorNoch keine Bewertungen
- Chapitre 1 Fondations Superficielles 1Dokument16 SeitenChapitre 1 Fondations Superficielles 1Mohamed Bensoula50% (2)
- NM 13.1.007 (1998)Dokument14 SeitenNM 13.1.007 (1998)hanif abdelilah100% (1)
- Rapport de CoffrageDokument26 SeitenRapport de CoffragezerroukobeidaNoch keine Bewertungen
- TD FlexionSimpleDokument8 SeitenTD FlexionSimpleIsmail TiGuintNoch keine Bewertungen
- Mon Diapo PDFDokument16 SeitenMon Diapo PDFMichel GozoNoch keine Bewertungen
- Chapitre 3Dokument62 SeitenChapitre 3Abdelouhed HizbaniNoch keine Bewertungen
- Mur de Soutènement Calcul Des PousséesDokument8 SeitenMur de Soutènement Calcul Des Pousséesbilal ASBAIHINoch keine Bewertungen
- Chapitre II - Methodes de Calcul Des Groupes de PieuxDokument49 SeitenChapitre II - Methodes de Calcul Des Groupes de PieuxHocine AissouNoch keine Bewertungen
- Chapitre 5Dokument14 SeitenChapitre 5molk kallelNoch keine Bewertungen
- Cours11Coefficients Dinfluence de RigiditéDokument6 SeitenCours11Coefficients Dinfluence de RigiditéMoulay ZoubirNoch keine Bewertungen
- Examen Janv 2007 Efdynamique m2Dokument20 SeitenExamen Janv 2007 Efdynamique m2Anonymous 80p9OVNoch keine Bewertungen
- Compte Rendu PlaxisDokument17 SeitenCompte Rendu PlaxisKhaoula MessaoudiNoch keine Bewertungen
- L'enrobageDokument21 SeitenL'enrobageAzmi AnassNoch keine Bewertungen
- Guyon MassonnetDokument37 SeitenGuyon Massonnetzoya RHLNoch keine Bewertungen
- Chapitre 08 Poutre ContinuDokument9 SeitenChapitre 08 Poutre ContinuRania Ben HassineNoch keine Bewertungen
- Element de RheologieDokument20 SeitenElement de RheologiephanNoch keine Bewertungen
- Boukadida AlaEdine LGC-A03-P&C TP2Dokument26 SeitenBoukadida AlaEdine LGC-A03-P&C TP2Ala EdinNoch keine Bewertungen
- Capacité Portante - Essais de Laboratoire - 2021 - MoodleDokument10 SeitenCapacité Portante - Essais de Laboratoire - 2021 - MoodleAlec WalkerNoch keine Bewertungen
- TD 1 Forme Variationnelle CorrDokument6 SeitenTD 1 Forme Variationnelle CorrLe Père BéniNoch keine Bewertungen
- Chapitre 1 - Murs de Soutènement FinalDokument12 SeitenChapitre 1 - Murs de Soutènement Finalsiduo12Noch keine Bewertungen
- Pfe 1Dokument114 SeitenPfe 1alifatmaNoch keine Bewertungen
- Dalle PleineDokument10 SeitenDalle PleineMohamed Taher JebariNoch keine Bewertungen
- Rappel Mecanique Des Sols PDFDokument53 SeitenRappel Mecanique Des Sols PDFMazenAyadiNoch keine Bewertungen
- SERIE TD3 Géometrie Des MassesDokument4 SeitenSERIE TD3 Géometrie Des MassesElfahime HamzaNoch keine Bewertungen
- Cours BA ST2 Chap 1Dokument15 SeitenCours BA ST2 Chap 1philou6259100% (1)
- But de L'essaiDokument6 SeitenBut de L'essaiManal Tahri0% (1)
- Rapport TP GeotechDokument22 SeitenRapport TP GeotechBinetou THIARENoch keine Bewertungen
- Chapitre 4 - Dimensionnement ParasismiqueDokument37 SeitenChapitre 4 - Dimensionnement ParasismiquenihedNoch keine Bewertungen
- Distance VisibiliteDokument9 SeitenDistance VisibiliteHamza HalhouliNoch keine Bewertungen
- Cours de Construction MétalliqueDokument21 SeitenCours de Construction MétalliqueCastiglianoNoch keine Bewertungen
- Poids Total de La StructureDokument23 SeitenPoids Total de La StructureHanane BenGamraNoch keine Bewertungen
- Chap III Essais In-SituDokument9 SeitenChap III Essais In-SitumoazNoch keine Bewertungen
- Chapitre 3Dokument32 SeitenChapitre 3MOHAMED REDHA SOLTANINoch keine Bewertungen
- Methode RotationsDokument29 SeitenMethode RotationsnenesseNoch keine Bewertungen
- Ds Topographie 1GC Iset Nabeul 2013Dokument2 SeitenDs Topographie 1GC Iset Nabeul 2013Soulaima SeddikiNoch keine Bewertungen
- Document 014 Soutenance BTPDokument35 SeitenDocument 014 Soutenance BTPkinaniNoch keine Bewertungen
- Fondations Prof SyntheseDokument29 SeitenFondations Prof SynthesehzoualidNoch keine Bewertungen
- 05 - BA05 Adherence CoursDokument8 Seiten05 - BA05 Adherence CoursAnani FernandNoch keine Bewertungen
- L' Ingénieur et le développement durableVon EverandL' Ingénieur et le développement durableBewertung: 2 von 5 Sternen2/5 (1)
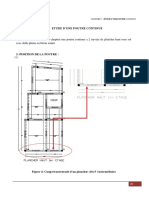
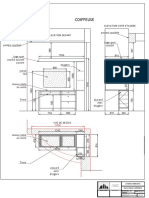
- Coiffeuse Et Placards D'angle PDFDokument2 SeitenCoiffeuse Et Placards D'angle PDFljr21Noch keine Bewertungen
- Rapport de StageDokument6 SeitenRapport de Stageljr21Noch keine Bewertungen
- Aciers Mottard 12 1Dokument1 SeiteAciers Mottard 12 1ljr21Noch keine Bewertungen
- Decret 2007-009 Du 9 Janvier 2007 CDI Et PreavisDokument1 SeiteDecret 2007-009 Du 9 Janvier 2007 CDI Et Preavisljr21Noch keine Bewertungen
- Francais - Exercice D'articulationDokument12 SeitenFrancais - Exercice D'articulationljr21Noch keine Bewertungen
- Ald Hors Liste - Pnds Sur La Dysplasie Fibreuse Des OsDokument81 SeitenAld Hors Liste - Pnds Sur La Dysplasie Fibreuse Des Osljr21Noch keine Bewertungen
- Isolation Mur Laine Minerale Semi Rigide GR32 RouleDokument2 SeitenIsolation Mur Laine Minerale Semi Rigide GR32 Rouleljr21Noch keine Bewertungen
- Decret 2007-009 Du 9 Janvier 2007 CDI Et PreavisDokument5 SeitenDecret 2007-009 Du 9 Janvier 2007 CDI Et Preavisljr21Noch keine Bewertungen
- 81-Ipea IpeDokument4 Seiten81-Ipea Ipeljr21Noch keine Bewertungen
- Calcul DallageDokument20 SeitenCalcul Dallagebebe13004Noch keine Bewertungen
- Alucobond Et MR Collé PDFDokument52 SeitenAlucobond Et MR Collé PDFljr21Noch keine Bewertungen
- Phi-1110 A19 87853Dokument11 SeitenPhi-1110 A19 87853marlenezogo8Noch keine Bewertungen
- Identité Meurtrières-3Dokument2 SeitenIdentité Meurtrières-3Alexa VázquezNoch keine Bewertungen
- Ma PhilosophieDokument4 SeitenMa PhilosophieAmina OusaidNoch keine Bewertungen
- Troupeau-Le Traité Sur La TrinitéDokument20 SeitenTroupeau-Le Traité Sur La TrinitéHammadi HabadNoch keine Bewertungen
- Se Conhecesses o Dom de DeusDokument1 SeiteSe Conhecesses o Dom de Deusaggathaestrela100% (3)
- Encyclopédie de La Gestion Et Du ManagementDokument315 SeitenEncyclopédie de La Gestion Et Du ManagementSafa Fessi50% (2)
- Anthropologie Chez ST Augustin Et L'anthrolopogie MédiévaleDokument4 SeitenAnthropologie Chez ST Augustin Et L'anthrolopogie MédiévaleBenjamin MilordNoch keine Bewertungen
- Valeur Test Critere de Caracterisation StatistiqueDokument7 SeitenValeur Test Critere de Caracterisation StatistiqueJuan SimpertigueNoch keine Bewertungen
- Cours Terminologie Scientifique Et Expression Écrite Et OraleDokument8 SeitenCours Terminologie Scientifique Et Expression Écrite Et OraleSAHRA YOUNoch keine Bewertungen
- ABÉLÈS, Marc e JEUDY, Henri P - Anthropologie Du PolitiqueDokument35 SeitenABÉLÈS, Marc e JEUDY, Henri P - Anthropologie Du Politiquesergio tavaresNoch keine Bewertungen
- Eda Baci Ped 3757Dokument4 SeitenEda Baci Ped 3757api-371465708Noch keine Bewertungen
- Hypnose Ericksonienne Communication Engageante Persuasive Infuence Psychologie Sociale Persuasion Jean Touati Orgadia PDFDokument11 SeitenHypnose Ericksonienne Communication Engageante Persuasive Infuence Psychologie Sociale Persuasion Jean Touati Orgadia PDFNas FartasNoch keine Bewertungen
- Marx Et Le Marxisme Une Pensee Une Histoire PDFDokument161 SeitenMarx Et Le Marxisme Une Pensee Une Histoire PDFhugueseap100% (1)
- PDF Translator 1690979409622Dokument72 SeitenPDF Translator 1690979409622Stephane KABORENoch keine Bewertungen
- Tendances Principales D e La Recherche Dans Les Sciences Sociales Et HumainesDokument1.034 SeitenTendances Principales D e La Recherche Dans Les Sciences Sociales Et HumainesfenomenotextesNoch keine Bewertungen
- Antécédent (Grammaire)Dokument2 SeitenAntécédent (Grammaire)Evariste GbedoyesiaNoch keine Bewertungen
- 3.1 Charge Décharge C ExaoDokument3 Seiten3.1 Charge Décharge C ExaoYa HiaNoch keine Bewertungen
- Guide Confiance en SoiDokument13 SeitenGuide Confiance en SoiLuisNoch keine Bewertungen
- Chapitre4 AlgebreS1Dokument21 SeitenChapitre4 AlgebreS1Salah MoulakatNoch keine Bewertungen
- Trouver Le Plaisir D Enseigner Et D ApprendreDokument6 SeitenTrouver Le Plaisir D Enseigner Et D ApprendreStukineNoch keine Bewertungen
- Poly Si MeriseDokument112 SeitenPoly Si MeriseZaid ZizouNoch keine Bewertungen