Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Tag-Lish Wattpad Stories: A Code-Switching AnalysisDokument9 SeitenTag-Lish Wattpad Stories: A Code-Switching AnalysisDonna Joana A. SorianoNoch keine Bewertungen
- Trolldómr in Early Medieval Scandinavia-Catharina Raudvere PDFDokument50 SeitenTrolldómr in Early Medieval Scandinavia-Catharina Raudvere PDFludaisi100% (1)
- D4FDokument97 SeitenD4Fcatant86% (7)
- PA10 0389 Technical Manual 911 GT3 Cup 991 MY 2019 V8 enDokument491 SeitenPA10 0389 Technical Manual 911 GT3 Cup 991 MY 2019 V8 enjlee_296737Noch keine Bewertungen
- Wolf, Werner and Bernhart, Walter (Ed.) - Description in Literature and Other MediaDokument352 SeitenWolf, Werner and Bernhart, Walter (Ed.) - Description in Literature and Other MediaElNegroLiterario100% (3)
- Commit30 - Goal Getting GuideDokument4 SeitenCommit30 - Goal Getting GuidePongnateeNoch keine Bewertungen
- Consultancy CP MGT ConsultingDokument4 SeitenConsultancy CP MGT Consultingvpaddle80Noch keine Bewertungen
- Animals: Morphometric Study of Mus Musculus, Rattus Norvegicus, and Rattus Rattus in QatarDokument15 SeitenAnimals: Morphometric Study of Mus Musculus, Rattus Norvegicus, and Rattus Rattus in Qatarjlee_296737Noch keine Bewertungen
- Leptin Signal Transduction Underlies The Differential Metabolic Response of LEW and WKY Rats To Cafeteria DietDokument10 SeitenLeptin Signal Transduction Underlies The Differential Metabolic Response of LEW and WKY Rats To Cafeteria Dietjlee_296737Noch keine Bewertungen
- PDM User ManualDokument60 SeitenPDM User Manualjlee_296737100% (1)
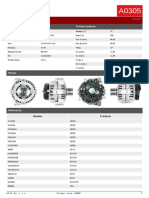
- Product CardDokument2 SeitenProduct Cardjlee_296737Noch keine Bewertungen
- Product CardDokument2 SeitenProduct Cardjlee_296737Noch keine Bewertungen
- LMDH Technical Regulations 2022.06.21Dokument64 SeitenLMDH Technical Regulations 2022.06.21jlee_296737Noch keine Bewertungen
- Elektroshemy Ford Escort Vi enDokument23 SeitenElektroshemy Ford Escort Vi enjlee_296737Noch keine Bewertungen
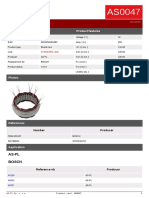
- AS0047Dokument2 SeitenAS0047jlee_296737Noch keine Bewertungen
- Clio2 Cup Rally enDokument67 SeitenClio2 Cup Rally enjlee_296737Noch keine Bewertungen
- MR392CLIO8 - Clio 3 Echipament Electric PDFDokument434 SeitenMR392CLIO8 - Clio 3 Echipament Electric PDFAndrei Sterian100% (1)
- Spare Parts Book: Reference: 7711150216 Date: 06/07/2015Dokument111 SeitenSpare Parts Book: Reference: 7711150216 Date: 06/07/2015jlee_296737Noch keine Bewertungen
- MR392CLIO1Dokument1.276 SeitenMR392CLIO1cherif yahyaouiNoch keine Bewertungen
- Effect of Ethanol On Engine PerformanceDokument17 SeitenEffect of Ethanol On Engine PerformancelatshareNoch keine Bewertungen
- Clio 8 Electrical Fault FindingDokument201 SeitenClio 8 Electrical Fault Findingjlee_296737100% (1)
- PA10 0132 Technical Manual GT3 CUP 991 2014 v2.6 enDokument320 SeitenPA10 0132 Technical Manual GT3 CUP 991 2014 v2.6 enjlee_296737Noch keine Bewertungen
- 2016 991 Cup Technical Manual V1 PDFDokument326 Seiten2016 991 Cup Technical Manual V1 PDFJaviJi9Noch keine Bewertungen
- Balance of Performance Blancpain GT Series Asia Tracks B 04042019Dokument4 SeitenBalance of Performance Blancpain GT Series Asia Tracks B 04042019jlee_296737Noch keine Bewertungen
- 911 GT3 CupDokument25 Seiten911 GT3 Cupjlee_296737Noch keine Bewertungen
- Experimental Study of The Impact of Port and Direct Fuel Injection Strategies On The Efficiency, Performance and Emissions of A Downsized Gdi EngineDokument416 SeitenExperimental Study of The Impact of Port and Direct Fuel Injection Strategies On The Efficiency, Performance and Emissions of A Downsized Gdi Enginejlee_296737Noch keine Bewertungen
- Balance of PerformanceDokument6 SeitenBalance of Performancejlee_296737Noch keine Bewertungen
- Effect of Retarded Injection Timing On Knock Resistance and Cycle To Cycle Variation in GDI EngineDokument8 SeitenEffect of Retarded Injection Timing On Knock Resistance and Cycle To Cycle Variation in GDI Enginejlee_296737Noch keine Bewertungen
- Balance of Performance IGTC Tracks BDokument5 SeitenBalance of Performance IGTC Tracks Bjlee_296737Noch keine Bewertungen
- TB IWSC 20 12 Daytona 240 BoP Tables 06252020Dokument7 SeitenTB IWSC 20 12 Daytona 240 BoP Tables 06252020jlee_296737Noch keine Bewertungen
- TB Iwsc 19-21 Bop Tables 040319Dokument4 SeitenTB Iwsc 19-21 Bop Tables 040319jlee_296737Noch keine Bewertungen
- TCR Lambda Monitoring MethodDokument4 SeitenTCR Lambda Monitoring Methodjlee_296737Noch keine Bewertungen
- Decision of The Endurance Committee: Article: 7.4.3 2018-2019 FIA World Endurance Championship Sporting RegulationsDokument2 SeitenDecision of The Endurance Committee: Article: 7.4.3 2018-2019 FIA World Endurance Championship Sporting Regulationsjlee_296737Noch keine Bewertungen
- TB Iwsc 19-18 Sebring Bop Tables 022719Dokument6 SeitenTB Iwsc 19-18 Sebring Bop Tables 022719jlee_296737Noch keine Bewertungen
- TribologyTransactions2008 PeggyDokument16 SeitenTribologyTransactions2008 Peggyjlee_296737Noch keine Bewertungen
- Lecture 03,04,05 - Intensity Transformation and Spatial Filtering PDFDokument46 SeitenLecture 03,04,05 - Intensity Transformation and Spatial Filtering PDFVu Quang PhamNoch keine Bewertungen
- Mgt503 Latest Mcqs Covering Lectures 1 40Dokument79 SeitenMgt503 Latest Mcqs Covering Lectures 1 40prthr100% (1)
- Essential RightDokument42 SeitenEssential Righthamada3747Noch keine Bewertungen
- Death PhiloDokument26 SeitenDeath Philorostum AndradaNoch keine Bewertungen
- Lab Report: Rocket Experiment 2017Dokument20 SeitenLab Report: Rocket Experiment 2017api-343596257Noch keine Bewertungen
- 6au1 4scientificmethodDokument12 Seiten6au1 4scientificmethodapi-333988042Noch keine Bewertungen
- Studies in Applied Philosophy, Epistemology and Rational EthicsDokument291 SeitenStudies in Applied Philosophy, Epistemology and Rational EthicsRey Jerly Duran BenitoNoch keine Bewertungen
- Narrative Report On Classroom Management SY 2019-2020Dokument5 SeitenNarrative Report On Classroom Management SY 2019-2020Red DelloroNoch keine Bewertungen
- Philippine Art As Filipino: Contemporary Arts From The Philippine RegionsDokument17 SeitenPhilippine Art As Filipino: Contemporary Arts From The Philippine RegionsAhmed Ameer SalapuddinNoch keine Bewertungen
- CBSE NET Jan 2017 Paper I Set W PDFDokument23 SeitenCBSE NET Jan 2017 Paper I Set W PDFVanitha NNoch keine Bewertungen
- Ishwar Pratyabhijna Vivritti Vimarshini - Abhinava Gupta 5922 Alm 26 SHLF 4 1475 K Devanagari - Kashmir Shaivism Part12Dokument73 SeitenIshwar Pratyabhijna Vivritti Vimarshini - Abhinava Gupta 5922 Alm 26 SHLF 4 1475 K Devanagari - Kashmir Shaivism Part12Kashmir Shaiva and Kashmiri Works at Dharmartha TrustNoch keine Bewertungen
- MGMT3006 Assessments2 CaseStudyReportDokument15 SeitenMGMT3006 Assessments2 CaseStudyReportiiskandarNoch keine Bewertungen
- 3 Komponen HotsDokument7 Seiten3 Komponen HotsmeydiawatiNoch keine Bewertungen
- Iich 13Dokument21 SeitenIich 13elisha89261Noch keine Bewertungen
- Fishbowl DiscussionsDokument6 SeitenFishbowl DiscussionsscottmpetriNoch keine Bewertungen
- Ref Phy 9Dokument1.351 SeitenRef Phy 9mkumar0% (2)
- Civic Welfare Training Service Program 2Dokument30 SeitenCivic Welfare Training Service Program 2Glen Mangali100% (3)
- Unit 1 - Humanities - Misconceptions, Humanity & Humanism & CultureDokument17 SeitenUnit 1 - Humanities - Misconceptions, Humanity & Humanism & CultureFreaky TeslaNoch keine Bewertungen
- Where You Stand Determines What You SeeDokument6 SeitenWhere You Stand Determines What You SeeMylene Rochelle Manguiob Cruz100% (1)
- Topic 3c. Law & MoralityDokument18 SeitenTopic 3c. Law & MoralityYuvanesh Kumar100% (1)
- BROSUR 58th TEFLIN Conference 2g38ungDokument3 SeitenBROSUR 58th TEFLIN Conference 2g38ungAngela IndrianiNoch keine Bewertungen
- Daily Lesson Log Subject English Grade Level: 8 Grading Period: I. ObjectivesDokument2 SeitenDaily Lesson Log Subject English Grade Level: 8 Grading Period: I. ObjectivesArchelSayagoNoch keine Bewertungen
- Beyond The Axioms: The Question of Objectivity in MathematicsDokument19 SeitenBeyond The Axioms: The Question of Objectivity in Mathematicscpeter9Noch keine Bewertungen
- Word of MouthDokument141 SeitenWord of MouthMurali MuthusamyNoch keine Bewertungen
- A Discussion On The Names and Attributes of AllahDokument3 SeitenA Discussion On The Names and Attributes of AllahmaryamNoch keine Bewertungen