Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Class Prophecy 012Dokument11 SeitenClass Prophecy 012Mythical Persues100% (2)
- Vox Latina The Pronunciation of Classical LatinDokument145 SeitenVox Latina The Pronunciation of Classical Latinyanmaes100% (4)
- PhysicsLab PreReport201Dokument9 SeitenPhysicsLab PreReport201Giuliana SchulzNoch keine Bewertungen
- 30-99!90!1619-Rev.0-Method Statement For Pipeline WeldingDokument21 Seiten30-99!90!1619-Rev.0-Method Statement For Pipeline WeldingkilioNoch keine Bewertungen
- Essentials of Report Writing - Application in BusinessDokument28 SeitenEssentials of Report Writing - Application in BusinessMahmudur Rahman75% (4)
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDokument1 SeitePSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherNoch keine Bewertungen
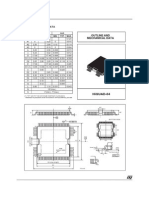
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDokument1 SeitePowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherNoch keine Bewertungen
- Pso 36Dokument1 SeitePso 36Dan EsentherNoch keine Bewertungen
- Powerso16: Outline and Mechanical DataDokument1 SeitePowerso16: Outline and Mechanical DataDan EsentherNoch keine Bewertungen
- Hiquad 64Dokument1 SeiteHiquad 64Dan EsentherNoch keine Bewertungen
- 10832Dokument26 Seiten10832Dan EsentherNoch keine Bewertungen
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDokument1 SeiteMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNoch keine Bewertungen
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDokument1 SeitePowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherNoch keine Bewertungen
- 10833Dokument18 Seiten10833Dan EsentherNoch keine Bewertungen
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDokument1 SeitePowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNoch keine Bewertungen
- L9929Dokument3 SeitenL9929Dan EsentherNoch keine Bewertungen
- Ppak Mechanical Data: Dim. Min. TYP MaxDokument1 SeitePpak Mechanical Data: Dim. Min. TYP MaxDan EsentherNoch keine Bewertungen
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Dokument26 SeitenFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNoch keine Bewertungen
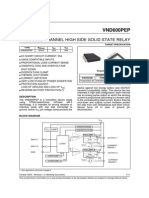
- VND830PEP-E: Double Channel High Side DriverDokument13 SeitenVND830PEP-E: Double Channel High Side DriverDan EsentherNoch keine Bewertungen
- VNQ830A-E: Quad Channel High Side DriverDokument17 SeitenVNQ830A-E: Quad Channel High Side DriverDan EsentherNoch keine Bewertungen
- 10830Dokument21 Seiten10830Dan EsentherNoch keine Bewertungen
- 10261Dokument10 Seiten10261Dan EsentherNoch keine Bewertungen
- 10831Dokument21 Seiten10831Dan EsentherNoch keine Bewertungen
- Uh 30Dokument10 SeitenUh 30Dan EsentherNoch keine Bewertungen
- 10311Dokument23 Seiten10311Dan Esenther100% (1)
- 10683Dokument19 Seiten10683Dan EsentherNoch keine Bewertungen
- 9696Dokument17 Seiten9696Dan EsentherNoch keine Bewertungen
- 9927Dokument11 Seiten9927Dan EsentherNoch keine Bewertungen
- 10640Dokument22 Seiten10640Dan EsentherNoch keine Bewertungen
- 10302Dokument4 Seiten10302Dan EsentherNoch keine Bewertungen
- 10303Dokument5 Seiten10303Dan EsentherNoch keine Bewertungen
- 10022Dokument262 Seiten10022Dan EsentherNoch keine Bewertungen
- 9933Dokument11 Seiten9933Dan EsentherNoch keine Bewertungen
- 9934Dokument11 Seiten9934Dan EsentherNoch keine Bewertungen
- 9792Dokument21 Seiten9792Dan EsentherNoch keine Bewertungen
- Froyen06-The Keynesian System I - The Role of Aggregate DemandDokument40 SeitenFroyen06-The Keynesian System I - The Role of Aggregate DemandUditi BiswasNoch keine Bewertungen
- A Short Example Presentation On Molecules Slash Molecular Chemistry in LatexDokument8 SeitenA Short Example Presentation On Molecules Slash Molecular Chemistry in LatexintangibilidadeNoch keine Bewertungen
- Communication in Application: WhatsappDokument18 SeitenCommunication in Application: WhatsappNurul SuhanaNoch keine Bewertungen
- ListDokument4 SeitenListgeralda pierrelusNoch keine Bewertungen
- Commu I ReviewedDokument45 SeitenCommu I ReviewedCabdirisaaq CabdisalanNoch keine Bewertungen
- Motor Operated ValveDokument6 SeitenMotor Operated ValveYosses Sang NahkodaNoch keine Bewertungen
- CSIR AnalysisDokument1 SeiteCSIR Analysisசெபா செல்வாNoch keine Bewertungen
- Chapter 20: Sleep Garzon Maaks: Burns' Pediatric Primary Care, 7th EditionDokument4 SeitenChapter 20: Sleep Garzon Maaks: Burns' Pediatric Primary Care, 7th EditionHelen UgochukwuNoch keine Bewertungen
- 3 5 3Dokument4 Seiten3 5 3Amr Mohamed RedaNoch keine Bewertungen
- CONTACT DETAILS HC JUDGES LIBRARIESDokument4 SeitenCONTACT DETAILS HC JUDGES LIBRARIESSHIVAM BHATTACHARYANoch keine Bewertungen
- The English Center Articulation AgreementDokument9 SeitenThe English Center Articulation AgreementJose CabreraNoch keine Bewertungen
- MinistopDokument23 SeitenMinistopAlisa Gabriela Sioco OrdasNoch keine Bewertungen
- Blackmagic RAW Speed TestDokument67 SeitenBlackmagic RAW Speed TestLeonardo Terra CravoNoch keine Bewertungen
- Canberra As A Planned CityDokument12 SeitenCanberra As A Planned Citybrumbies15100% (1)
- Building MassingDokument6 SeitenBuilding MassingJohn AmirNoch keine Bewertungen
- Chenab Railway Bridge Project ReportDokument50 SeitenChenab Railway Bridge Project ReportPreet Chahal100% (1)
- VNACS Final Case ReportDokument9 SeitenVNACS Final Case ReportVikram Singh TomarNoch keine Bewertungen
- MCS Adopts Milyli Software Redaction Tool BlackoutDokument3 SeitenMCS Adopts Milyli Software Redaction Tool BlackoutPR.comNoch keine Bewertungen
- DISADVANTAGESDokument3 SeitenDISADVANTAGESMhd MiranNoch keine Bewertungen
- Chapter 27 Protists I. Evolution of EukaryotesDokument7 SeitenChapter 27 Protists I. Evolution of EukaryotesNadeem IqbalNoch keine Bewertungen
- Arsh Final Project ReportDokument65 SeitenArsh Final Project Report720 Manvir SinghNoch keine Bewertungen
- Ferain Et Al, 2016 - The Fatty Acid Profile of Rainbow Trout Liver Cells Modulates Their Tolerance To Methylmercury and CadmiumDokument12 SeitenFerain Et Al, 2016 - The Fatty Acid Profile of Rainbow Trout Liver Cells Modulates Their Tolerance To Methylmercury and Cadmiumarthur5927Noch keine Bewertungen
- DrainHoles - InspectionDokument14 SeitenDrainHoles - Inspectionohm3011Noch keine Bewertungen
- jk2 JAVADokument57 Seitenjk2 JAVAAndi FadhillahNoch keine Bewertungen
- Anna University CTDokument3 SeitenAnna University CTprayog8Noch keine Bewertungen