Das könnte Ihnen auch gefallen
- Image Segmentation Digital Image ProcessingDokument44 SeitenImage Segmentation Digital Image Processingnaveednad2003556100% (1)
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESVon EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNoch keine Bewertungen
- Klasifikasi Gambar MedisDokument23 SeitenKlasifikasi Gambar MedisAnnisacakeshop YasminNoch keine Bewertungen
- Chapter 3 MethdologyDokument22 SeitenChapter 3 MethdologySantosh ChacharkarNoch keine Bewertungen
- Image Processing Techniques For Machine VisionDokument9 SeitenImage Processing Techniques For Machine VisionjfhackNoch keine Bewertungen
- PcommsDokument24 SeitenPcommsNeslynNoch keine Bewertungen
- Image Segmentation by Using Thershod Techniques: Salem Saleh Al-Amri, N.V. Kalyankar and Khamitkar S.DDokument4 SeitenImage Segmentation by Using Thershod Techniques: Salem Saleh Al-Amri, N.V. Kalyankar and Khamitkar S.DAbel De la FuenteNoch keine Bewertungen
- ImSeg 10 11 18Dokument41 SeitenImSeg 10 11 18AbhishemNoch keine Bewertungen
- Understanding Regions and Region Segmentation: by Nayan KhinvasaraDokument59 SeitenUnderstanding Regions and Region Segmentation: by Nayan KhinvasaraDeepali GawadeNoch keine Bewertungen
- MOTION DETECTION AND IMAGE SEGMENTATIONDokument30 SeitenMOTION DETECTION AND IMAGE SEGMENTATIONAshwin Josiah SamuelNoch keine Bewertungen
- MCT 6.1Dokument32 SeitenMCT 6.1Alfred CheriyanNoch keine Bewertungen
- DIP2Dokument80 SeitenDIP2gigabyte1812Noch keine Bewertungen
- Name: Date of Performance: Roll No: Date of Submission: Batch: ExaminedDokument3 SeitenName: Date of Performance: Roll No: Date of Submission: Batch: ExaminedMahadevNoch keine Bewertungen
- Image Segmentation Thresholding Techniques: University of Science and Technology of HanoiDokument8 SeitenImage Segmentation Thresholding Techniques: University of Science and Technology of HanoidieuthNoch keine Bewertungen
- Image Processing and AnalysisDokument38 SeitenImage Processing and AnalysisGyan KirtiNoch keine Bewertungen
- Presentation 1Dokument26 SeitenPresentation 1MJAR ProgrammerNoch keine Bewertungen
- L-5, 6,7 - (Digital ImageProcessing - Image Enhancement in Spatial Domain)Dokument130 SeitenL-5, 6,7 - (Digital ImageProcessing - Image Enhancement in Spatial Domain)career Point BastiNoch keine Bewertungen
- Image Segmentation and Compression TechniquesDokument42 SeitenImage Segmentation and Compression TechniquesShubham DhundaleNoch keine Bewertungen
- Variable Thresholding Using Moving AveragesDokument8 SeitenVariable Thresholding Using Moving AveragesDarshanNoch keine Bewertungen
- Comparative Analysis of Segmented Brain MR Images Using Different Thresholding TechniquesDokument7 SeitenComparative Analysis of Segmented Brain MR Images Using Different Thresholding TechniquesInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- What Is A Digital Image: Pixel Values Typically Represent Gray Levels, Colours, Heights, Opacities EtcDokument7 SeitenWhat Is A Digital Image: Pixel Values Typically Represent Gray Levels, Colours, Heights, Opacities Etctest topprNoch keine Bewertungen
- Dip 4Dokument40 SeitenDip 4DEVID ROYNoch keine Bewertungen
- Survey Threshold Image Segmentation TechniquesDokument6 SeitenSurvey Threshold Image Segmentation TechniquesSanjay ShahNoch keine Bewertungen
- Enhancement 18 01 12Dokument33 SeitenEnhancement 18 01 12patel karnavNoch keine Bewertungen
- Dip Unit 4Dokument58 SeitenDip Unit 4sheikdavoodNoch keine Bewertungen
- Lab 4Dokument3 SeitenLab 4Kavin KarthiNoch keine Bewertungen
- Digital Image Segmentation of Water Traces in Rock ImagesDokument19 SeitenDigital Image Segmentation of Water Traces in Rock Imageskabe88101Noch keine Bewertungen
- Automatic ThresholdingDokument18 SeitenAutomatic ThresholdingMuhammad Usman KhanNoch keine Bewertungen
- (Department For Technology Enhanced Learning) : Teaching Innovation - Entrepreneurial - GlobalDokument91 Seiten(Department For Technology Enhanced Learning) : Teaching Innovation - Entrepreneurial - Globalguptavikas_1051Noch keine Bewertungen
- Gray Level Transformations Guide: Image Processing Techniques for Contrast, Noise Reduction, FilteringDokument37 SeitenGray Level Transformations Guide: Image Processing Techniques for Contrast, Noise Reduction, FilteringPradeep RajputNoch keine Bewertungen
- Image Enhancement TechniquesDokument191 SeitenImage Enhancement TechniquesJayavardhini GopalNoch keine Bewertungen
- PIP Unit 3 Image SegmentationDokument54 SeitenPIP Unit 3 Image SegmentationRam KapurNoch keine Bewertungen
- Image Enhancement in Spatial DomainDokument43 SeitenImage Enhancement in Spatial DomainMahreenNoch keine Bewertungen
- IT5409 Ch5 Segmentation v2Dokument64 SeitenIT5409 Ch5 Segmentation v2nguyễn ĐứcNoch keine Bewertungen
- Computer Vision NotesDokument15 SeitenComputer Vision NotesPavan BangaramNoch keine Bewertungen
- Digital Image ProcessingDokument59 SeitenDigital Image ProcessingSibgha IsrarNoch keine Bewertungen
- 2.2.1.1 Thresholding and Connected ComponentDokument52 Seiten2.2.1.1 Thresholding and Connected ComponentSathya BamaNoch keine Bewertungen
- QUESTION BANK FOR B.TECH CS 7 DIGITAL IMAGE PROCESSING.docxDokument52 SeitenQUESTION BANK FOR B.TECH CS 7 DIGITAL IMAGE PROCESSING.docxDesi babaNoch keine Bewertungen
- Basics of Radiography Testing and Image ProcessingDokument30 SeitenBasics of Radiography Testing and Image ProcessingbmrasheedNoch keine Bewertungen
- 3) Arithmetic OperationsDokument31 Seiten3) Arithmetic OperationsDeepak GawaliNoch keine Bewertungen
- DIP Lecture3 PDFDokument44 SeitenDIP Lecture3 PDFHafiz Shakeel Ahmad AwanNoch keine Bewertungen
- Image Processing: Dept - of Instrumentation Science University of PuneDokument54 SeitenImage Processing: Dept - of Instrumentation Science University of PuneBhupendra KarandikarNoch keine Bewertungen
- Automatic Lung Nodules Segmentation and Its 3D VisualizationDokument98 SeitenAutomatic Lung Nodules Segmentation and Its 3D Visualizationpriya dharshiniNoch keine Bewertungen
- Digital Image Processing: DR V ShreedharaDokument55 SeitenDigital Image Processing: DR V Shreedharaአስጠኚ TUBENoch keine Bewertungen
- Digital Image Processing: Dr. Mohannad K. Sabir Biomedical Engineering Department Fifth ClassDokument29 SeitenDigital Image Processing: Dr. Mohannad K. Sabir Biomedical Engineering Department Fifth Classsnake teethNoch keine Bewertungen
- Digital Image Processing StagesDokument104 SeitenDigital Image Processing StagesHaRisSaLeemNoch keine Bewertungen
- Segmentation 03Dokument33 SeitenSegmentation 03Thilaga MohanNoch keine Bewertungen
- Locating An Object of Interest in An Image Using Its Color FeatureDokument4 SeitenLocating An Object of Interest in An Image Using Its Color Featureeditor_ijarcsseNoch keine Bewertungen
- Raw Image Database Compression TechniquesDokument16 SeitenRaw Image Database Compression Techniquesmulayam singh yadavNoch keine Bewertungen
- Combined Approach For Image SegmentationDokument4 SeitenCombined Approach For Image SegmentationseventhsensegroupNoch keine Bewertungen
- Camera Models and Image Processing TechniquesDokument38 SeitenCamera Models and Image Processing TechniquesElisa PopNoch keine Bewertungen
- Basic Image Processing Techniques in OpenCV using PythonDokument26 SeitenBasic Image Processing Techniques in OpenCV using PythonPOORVI JOSHINoch keine Bewertungen
- Image Enhancement in The Spatial DomainDokument10 SeitenImage Enhancement in The Spatial DomainFahim ShaikNoch keine Bewertungen
- Aerial Photography Techniques and Digital Image AnalysisDokument94 SeitenAerial Photography Techniques and Digital Image AnalysisShobhit MishraNoch keine Bewertungen
- CS231. Nhập môn Thị giác máy tính: Image segmentationDokument60 SeitenCS231. Nhập môn Thị giác máy tính: Image segmentationKim Anh NguyễnNoch keine Bewertungen
- Digital Image Definitions&TransformationsDokument18 SeitenDigital Image Definitions&TransformationsAnand SithanNoch keine Bewertungen
- Image ProcessingDokument170 SeitenImage ProcessingDineshNoch keine Bewertungen
- Edge Detection & ThresholdingDokument29 SeitenEdge Detection & ThresholdingGopi ChandNoch keine Bewertungen
- 7th Semester Power Electronics Question Bank (Arunkumar G, Lecturer in EC Dept, STJIT, RanebennurDokument31 Seiten7th Semester Power Electronics Question Bank (Arunkumar G, Lecturer in EC Dept, STJIT, RanebennurShahzeeb Pk100% (1)
- 0 1 Power Electronics 6th Chapter Notes Arunkumar G, Lecturer in STJIT, RanebennurDokument87 Seiten0 1 Power Electronics 6th Chapter Notes Arunkumar G, Lecturer in STJIT, RanebennurEchanur RakiNoch keine Bewertungen
- Coherent Detection in Optical Fiber Systems: Ezra Ip, Alan Pak Tao Lau, Daniel J. F. Barros, Joseph M. KahnDokument39 SeitenCoherent Detection in Optical Fiber Systems: Ezra Ip, Alan Pak Tao Lau, Daniel J. F. Barros, Joseph M. KahnGourav_Karn_9990Noch keine Bewertungen
- Eye DiagramDokument3 SeitenEye DiagramEchanur RakiNoch keine Bewertungen
- DSP Algorithms & Architecture Unit1Dokument15 SeitenDSP Algorithms & Architecture Unit1vijaygenius123Noch keine Bewertungen
- Digital Image Processing Unit-6Dokument4 SeitenDigital Image Processing Unit-6Kpsteja TejaNoch keine Bewertungen
- 0 1 Power Electronics 6th Chapter Notes Arunkumar G, Lecturer in STJIT, RanebennurDokument87 Seiten0 1 Power Electronics 6th Chapter Notes Arunkumar G, Lecturer in STJIT, RanebennurEchanur RakiNoch keine Bewertungen
- Powerful Cooling and Easy Installation For Really Large SpacesDokument4 SeitenPowerful Cooling and Easy Installation For Really Large Spacesalkaf08Noch keine Bewertungen
- Artificial Lotus Leaf by NanocastingDokument4 SeitenArtificial Lotus Leaf by Nanocastinganon_527700070Noch keine Bewertungen
- TM4C129XNCZAD MicrocontrollerDokument2.191 SeitenTM4C129XNCZAD Microcontrollermamaligosu1Noch keine Bewertungen
- List of Linkages2016Dokument74 SeitenList of Linkages2016engrwho0% (1)
- Factors Effecting PerformanceDokument47 SeitenFactors Effecting Performancebembie83Noch keine Bewertungen
- STS - (3000K 6000K) - H1 Smart Transformer Station Installation GuideDokument105 SeitenSTS - (3000K 6000K) - H1 Smart Transformer Station Installation GuideSav SashaNoch keine Bewertungen
- Data ArchivingDokument63 SeitenData ArchivingHot_sergio100% (1)
- Air Pak SCBA Ordering Specifications (HS 6701)Dokument8 SeitenAir Pak SCBA Ordering Specifications (HS 6701)QHSE ManagerNoch keine Bewertungen
- ISO 128-25 Technical Drawings - General Principles of Presentation - Lines On Shipbuilding Drawings (1999)Dokument16 SeitenISO 128-25 Technical Drawings - General Principles of Presentation - Lines On Shipbuilding Drawings (1999)SantoshNoch keine Bewertungen
- Prepositions-Of-place Worksheet Azucena SalasDokument3 SeitenPrepositions-Of-place Worksheet Azucena SalasAndreia SimõesNoch keine Bewertungen
- !K Kanji Kaku - StrokesDokument18 Seiten!K Kanji Kaku - StrokeschingkakaNoch keine Bewertungen
- Paint Color Comparison ChartDokument132 SeitenPaint Color Comparison ChartCarlos Rubiños AlonsoNoch keine Bewertungen
- DPWH Standard Specifications for ShotcreteDokument12 SeitenDPWH Standard Specifications for ShotcreteDino Garzon OcinoNoch keine Bewertungen
- Chapter-Iv: Profile of The Hindu News PaperDokument5 SeitenChapter-Iv: Profile of The Hindu News PaperMurugan SaravananNoch keine Bewertungen
- Jotafloor SL UniversalDokument6 SeitenJotafloor SL UniversalrogandatambunanNoch keine Bewertungen
- Surging & Blow Out of Loop Seals in A CFBC BoilerDokument9 SeitenSurging & Blow Out of Loop Seals in A CFBC Boilermohamed faragNoch keine Bewertungen
- Week 2 PlanDokument3 SeitenWeek 2 Planapi-427127204Noch keine Bewertungen
- SPW3 Manual Rev 5Dokument713 SeitenSPW3 Manual Rev 5JPYadavNoch keine Bewertungen
- Slurry Flo BrochureDokument4 SeitenSlurry Flo BrochureChristian Andres Campa HernandezNoch keine Bewertungen
- Teradata Version DifferencesDokument3 SeitenTeradata Version DifferencesShambuReddy100% (1)
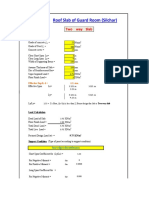
- Roof Slab of Guard RoomDokument3 SeitenRoof Slab of Guard RoomAditya KumarNoch keine Bewertungen
- Stereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010Dokument50 SeitenStereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010ththaalNoch keine Bewertungen
- Kodak 2000 Um SM SCHDokument157 SeitenKodak 2000 Um SM SCHВиталий КоптеловNoch keine Bewertungen
- Dont CryDokument8 SeitenDont CryIolanda Dolcet Ibars100% (1)
- Phase Locked LoopDokument4 SeitenPhase Locked LoopsagarduttaNoch keine Bewertungen
- Brigada Eskwela Activities With PicsDokument6 SeitenBrigada Eskwela Activities With PicsCharisse TocmoNoch keine Bewertungen
- LNMIIT Course Information Form: A. B. C. D. E. FDokument2 SeitenLNMIIT Course Information Form: A. B. C. D. E. FAayush JainNoch keine Bewertungen
- Abstracts Book Nanotech 2013Dokument151 SeitenAbstracts Book Nanotech 2013felipe de jesus juarez torresNoch keine Bewertungen
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsVon EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNoch keine Bewertungen
- Certified Solidworks Professional Advanced Weldments Exam PreparationVon EverandCertified Solidworks Professional Advanced Weldments Exam PreparationBewertung: 5 von 5 Sternen5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Von EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Bewertung: 5 von 5 Sternen5/5 (2)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Von EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Noch keine Bewertungen
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Von EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Bewertung: 4.5 von 5 Sternen4.5/5 (5)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressVon EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressBewertung: 5 von 5 Sternen5/5 (1)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersVon EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNoch keine Bewertungen
- Beginning AutoCAD® 2020 Exercise WorkbookVon EverandBeginning AutoCAD® 2020 Exercise WorkbookBewertung: 2.5 von 5 Sternen2.5/5 (3)