Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Chapter 04 Chemical EquilibriumDokument150 SeitenChapter 04 Chemical Equilibriumnoel100% (6)
- Circuits in MatlabDokument38 SeitenCircuits in MatlabRana UsmanNoch keine Bewertungen
- 2006 - A Survey of Approaches and Challenges in 3d and Multimodal 3d+2d Face RecognitionDokument15 Seiten2006 - A Survey of Approaches and Challenges in 3d and Multimodal 3d+2d Face RecognitionluongxuandanNoch keine Bewertungen
- 2005 - Designing Multiple Classi Er SystemsDokument10 Seiten2005 - Designing Multiple Classi Er SystemsluongxuandanNoch keine Bewertungen
- 2005 - A Method of 3D Face Recognition Based On Principal Component Analysis Algorithm - in ROIDokument4 Seiten2005 - A Method of 3D Face Recognition Based On Principal Component Analysis Algorithm - in ROIluongxuandanNoch keine Bewertungen
- 1992 - A Method For Registration of 3-D Shapes - ICP - OKDokument18 Seiten1992 - A Method For Registration of 3-D Shapes - ICP - OKluongxuandanNoch keine Bewertungen
- 1982 - Algorithm 583 LSQR Sparse LinearDokument15 Seiten1982 - Algorithm 583 LSQR Sparse LinearluongxuandanNoch keine Bewertungen
- Question For Practice Oracle (11g) With AnswersDokument32 SeitenQuestion For Practice Oracle (11g) With AnswersAnonymous J8V2pZZ100% (4)
- Module 3Dokument10 SeitenModule 3Michael godsonNoch keine Bewertungen
- C 13Dokument33 SeitenC 13rgerwwaaNoch keine Bewertungen
- Postmodernity in PiDokument2 SeitenPostmodernity in Pixhardy27Noch keine Bewertungen
- Seborg Chapter 1Dokument3 SeitenSeborg Chapter 1maykesguerraNoch keine Bewertungen
- What Is A Stress Intensification FactorDokument7 SeitenWhat Is A Stress Intensification FactorMahendra RathoreNoch keine Bewertungen
- Rails BasicsDokument229 SeitenRails BasicsachhuNoch keine Bewertungen
- 2020 Specimen Paper 1 Mark SchemeDokument16 Seiten2020 Specimen Paper 1 Mark SchemesarabNoch keine Bewertungen
- Study of Educational Aspiration and Socio-Economic Status of Secondary School StudentsDokument11 SeitenStudy of Educational Aspiration and Socio-Economic Status of Secondary School StudentsvivekNoch keine Bewertungen
- IECEx INE 12.0010X 002Dokument9 SeitenIECEx INE 12.0010X 002Marcos SiqueiraNoch keine Bewertungen
- 351 DatasheetDokument14 Seiten351 DatasheetRafael NavarroNoch keine Bewertungen
- Programming: Simon ScheideggerDokument90 SeitenProgramming: Simon ScheideggerRuben KempterNoch keine Bewertungen
- Import Data From Excel To Sap TableDokument11 SeitenImport Data From Excel To Sap TableSajjadNoch keine Bewertungen
- Summative Test in Grade 10 Science PDF FreeDokument2 SeitenSummative Test in Grade 10 Science PDF FreeMalyn ReyesNoch keine Bewertungen
- P103154 - 7.00 - Doc - Manual - 8000 WindlassDokument43 SeitenP103154 - 7.00 - Doc - Manual - 8000 WindlassDanNoch keine Bewertungen
- Ubd Planning Template With QuestionsDokument3 SeitenUbd Planning Template With Questionsapi-217297849Noch keine Bewertungen
- Replica User ManualDokument7 SeitenReplica User Manualjefz2607Noch keine Bewertungen
- Crane Wheels-General InformationDokument3 SeitenCrane Wheels-General InformationArvind VaishNoch keine Bewertungen
- Engineering Properties of Soil PDFDokument55 SeitenEngineering Properties of Soil PDFJam Apizara Chaizalee100% (1)
- Forces Revision Questions 1. Resistive Force.: Island School 1Dokument13 SeitenForces Revision Questions 1. Resistive Force.: Island School 1Deepal PrasankaNoch keine Bewertungen
- Data Rate Limits: Dept. of Computer Engineering Faculty of EngineeringDokument31 SeitenData Rate Limits: Dept. of Computer Engineering Faculty of Engineeringআসিফ রেজাNoch keine Bewertungen
- CDB Aia - Data Integration - Internship - Detailed HandbookDokument3 SeitenCDB Aia - Data Integration - Internship - Detailed HandbookRama KrishnanNoch keine Bewertungen
- 1SC0 2PF Exam-Paper 20180616Dokument20 Seiten1SC0 2PF Exam-Paper 20180616Thasanya AlgamaNoch keine Bewertungen
- BioTime 8.5 User ManualDokument144 SeitenBioTime 8.5 User ManualKashif Adeel50% (2)
- Fatigue Life Prediction - An Overview - ScienceDirect TopicsDokument14 SeitenFatigue Life Prediction - An Overview - ScienceDirect TopicsMohamed AlaaElDinNoch keine Bewertungen
- Simple MachinesDokument25 SeitenSimple MachinesMay ArispeNoch keine Bewertungen
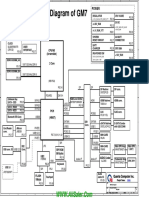
- Dell XPS 17 Quanta GM7 Rev D SchematicsDokument39 SeitenDell XPS 17 Quanta GM7 Rev D SchematicsvcompumatikNoch keine Bewertungen
- PM-DM/DMR / Pm-2Dm/2Dmr: Digital MultimetersDokument2 SeitenPM-DM/DMR / Pm-2Dm/2Dmr: Digital MultimeterstonielhageNoch keine Bewertungen