Das könnte Ihnen auch gefallen
- 02.02.01 Metrado SERVICIOS HIGIENICOS +++Dokument38 Seiten02.02.01 Metrado SERVICIOS HIGIENICOS +++Hugo Yaranga Prado0% (1)
- Formato de Tesis para TodosDokument1 SeiteFormato de Tesis para TodosHugo Yaranga PradoNoch keine Bewertungen
- Act2 Estructura Datos Sin InstrumentosDokument20 SeitenAct2 Estructura Datos Sin InstrumentosHugo Yaranga PradoNoch keine Bewertungen
- Metodo para Diseño Sobre RocasDokument1 SeiteMetodo para Diseño Sobre RocasHugo Yaranga PradoNoch keine Bewertungen
- Algoritmos FeneticosDokument1 SeiteAlgoritmos FeneticosHugo Yaranga PradoNoch keine Bewertungen
- Redes NueronalesDokument1 SeiteRedes NueronalesHugo Yaranga PradoNoch keine Bewertungen
- Pso Aplicado A La Ing IndustrialDokument1 SeitePso Aplicado A La Ing IndustrialHugo Yaranga PradoNoch keine Bewertungen
- Modelo de WordDokument7 SeitenModelo de WordHugo Yaranga PradoNoch keine Bewertungen
- 1) Camara de DesagueDokument12 Seiten1) Camara de DesagueOctavioBernardoMorenoRuizNoch keine Bewertungen
- Procesos ProbabilisticosDokument1 SeiteProcesos ProbabilisticosHugo Yaranga PradoNoch keine Bewertungen
- 1) Camara de DesagueDokument12 Seiten1) Camara de DesagueOctavioBernardoMorenoRuizNoch keine Bewertungen
- Procesos EstocasticosDokument1 SeiteProcesos EstocasticosHugo Yaranga PradoNoch keine Bewertungen
- Saneamiento BasicoDokument1 SeiteSaneamiento BasicoHugo Yaranga PradoNoch keine Bewertungen
- Carga y Deposicion de Sedimentos en Cursos de AguaDokument3 SeitenCarga y Deposicion de Sedimentos en Cursos de AguaHector J. MillanoNoch keine Bewertungen
- ASDFADDDDDokument4 SeitenASDFADDDDHugo Yaranga PradoNoch keine Bewertungen
- Criterios DISEÑO AGUA Y SANEMIENTO SEDAPAL RURAL Y PEQUEÑA CIUDADDokument51 SeitenCriterios DISEÑO AGUA Y SANEMIENTO SEDAPAL RURAL Y PEQUEÑA CIUDADluisjsgNoch keine Bewertungen
- Diseño DesarenadorDokument34 SeitenDiseño DesarenadorjhonromerNoch keine Bewertungen
- E.070 Albañileria ActualDokument15 SeitenE.070 Albañileria Actualhart_dan72727Noch keine Bewertungen
- Catalogo Ikasa - Venta 2016Dokument8 SeitenCatalogo Ikasa - Venta 2016Hugo Yaranga PradoNoch keine Bewertungen
- Modelos Dinamicos - Gvillarreal - JduranDokument24 SeitenModelos Dinamicos - Gvillarreal - JduranPedro PabloNoch keine Bewertungen
- Estudio JurídicoDokument1 SeiteEstudio JurídicoHugo Yaranga PradoNoch keine Bewertungen
- Silaabo AsdDokument3 SeitenSilaabo AsdHugo Yaranga PradoNoch keine Bewertungen
- r.j.484 MetodologíaDokument31 Seitenr.j.484 Metodologíaburzum308Noch keine Bewertungen
- Fem PoticosDokument1 SeiteFem PoticosHugo Yaranga PradoNoch keine Bewertungen
- Fem PoticosDokument1 SeiteFem PoticosHugo Yaranga PradoNoch keine Bewertungen
- Control de DerivasDokument111 SeitenControl de DerivasHugo Yaranga PradoNoch keine Bewertungen
- Reporte de Calculo para Areas de InundacionDokument2 SeitenReporte de Calculo para Areas de InundacionHugo Yaranga PradoNoch keine Bewertungen
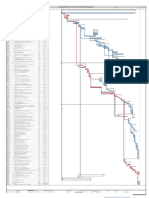
- Cronograma Fisico de ObraDokument1 SeiteCronograma Fisico de ObraHugo Yaranga PradoNoch keine Bewertungen
- Redes NeuronalesDokument1 SeiteRedes NeuronalesHugo Yaranga PradoNoch keine Bewertungen
- Algoritmos GeneticosDokument1 SeiteAlgoritmos GeneticosHugo Yaranga PradoNoch keine Bewertungen
- Ramón Silva CE AE1 Armadura HiperestáticaDokument43 SeitenRamón Silva CE AE1 Armadura HiperestáticaGlin JNoch keine Bewertungen
- Examen Parcial IE PDFDokument2 SeitenExamen Parcial IE PDFSol R HuamanNoch keine Bewertungen
- C2-Estudio de La Determinacion Estática y Estabilidad de Las Estructuras UpnDokument14 SeitenC2-Estudio de La Determinacion Estática y Estabilidad de Las Estructuras UpnOscar Llique CuzcoNoch keine Bewertungen
- Bases Técnicas WOM (03 06 21)Dokument23 SeitenBases Técnicas WOM (03 06 21)Sandra GallardoNoch keine Bewertungen
- Pre Dimensionamiento de Los Elementos: Columnas Placas ZapatasDokument13 SeitenPre Dimensionamiento de Los Elementos: Columnas Placas ZapatasHuayre SamaniegoNoch keine Bewertungen
- Examen de Aplazados de Ingeniería Antisismica 2021Dokument3 SeitenExamen de Aplazados de Ingeniería Antisismica 2021MQ Chino AlexanderNoch keine Bewertungen
- Libros GuiaDokument3 SeitenLibros GuiaAlejandro Daniel Montiel FuentesNoch keine Bewertungen
- Trabajo Estructuras IIDokument26 SeitenTrabajo Estructuras IIJhann Caruajulca100% (1)
- Armaduras PlanasDokument25 SeitenArmaduras PlanasPaul Ticla PuenteNoch keine Bewertungen
- Análisis Matricial - Portico InclinadoDokument3 SeitenAnálisis Matricial - Portico InclinadoAbel Max Julcarima E.Noch keine Bewertungen
- Diseño Sísmico y Estructural InfromeDokument8 SeitenDiseño Sísmico y Estructural InfromerenanNoch keine Bewertungen
- Ejercicio y Taller Analisis MatricialDokument5 SeitenEjercicio y Taller Analisis MatricialJuanCruzNoch keine Bewertungen
- Analisis Estructural IDokument4 SeitenAnalisis Estructural ICesar M. TrinidadNoch keine Bewertungen
- E Slide F1 Diseño de Zapatas Aisladas Con SafeDokument39 SeitenE Slide F1 Diseño de Zapatas Aisladas Con SafeMario GutiérrezNoch keine Bewertungen
- Deber Nro 3 Análisis Estructural IIDokument4 SeitenDeber Nro 3 Análisis Estructural IISebas ChaconNoch keine Bewertungen
- Tríptico Tsunami - ShoaDokument6 SeitenTríptico Tsunami - ShoaFederick Keenedy Ayala PaucarNoch keine Bewertungen
- M40339-CF-9000-DD20-DSC-0002 Seismic Design CriteriaDokument21 SeitenM40339-CF-9000-DD20-DSC-0002 Seismic Design CriteriaPamela ConchaNoch keine Bewertungen
- Informe Fotografico de Avance de Obra Puente PucayacuDokument4 SeitenInforme Fotografico de Avance de Obra Puente PucayacuLuis Carlos Argote CamargoNoch keine Bewertungen
- Material Complementario - PPT de La Sesión 07 - TaggedDokument31 SeitenMaterial Complementario - PPT de La Sesión 07 - TaggedRIDER JIMTH HONORATO TASAYCONoch keine Bewertungen
- Mapa ColumnasDokument1 SeiteMapa ColumnasDENNIS HERNANDEZNoch keine Bewertungen
- Ejercicios de Resistencia de Materiales 2Dokument31 SeitenEjercicios de Resistencia de Materiales 2Jhon Maycol Tafur Vilcarromero100% (1)
- Excel Metodo de Mutto Principal y Secundario - Calle CamposDokument16 SeitenExcel Metodo de Mutto Principal y Secundario - Calle CamposBERLYN AQUILES CALLE CAMPOSNoch keine Bewertungen
- 3 Practica Calificada FinitosDokument18 Seiten3 Practica Calificada Finitoserick7822Noch keine Bewertungen
- Ejemplo de Matrices Harry PinedaDokument38 SeitenEjemplo de Matrices Harry PinedaHARRY PINEDANoch keine Bewertungen
- Pandeo 2020 - Clase 2Dokument33 SeitenPandeo 2020 - Clase 2Lautaro AlonsoNoch keine Bewertungen
- Universidad Peruana Los Andes: Analisis EstructuralDokument8 SeitenUniversidad Peruana Los Andes: Analisis EstructuralMARCOS JOSUE RUPAY VARGASNoch keine Bewertungen
- Losas MODDokument65 SeitenLosas MODEdwinVlyFerNoch keine Bewertungen
- Tema 2 - Hiperestaticidad (Imprimir) PDFDokument20 SeitenTema 2 - Hiperestaticidad (Imprimir) PDFLuis RamirezNoch keine Bewertungen
- Exámen Final - Uc 2023 0 Análisis II Grupo 1Dokument3 SeitenExámen Final - Uc 2023 0 Análisis II Grupo 1Mijail Ramos DelgadoNoch keine Bewertungen
- Centro de RigidezDokument9 SeitenCentro de RigidezRayfranco Moreno HaroNoch keine Bewertungen