Das könnte Ihnen auch gefallen
- Synopsis On Pick Place Report .Dokument6 SeitenSynopsis On Pick Place Report .yrikkiNoch keine Bewertungen
- Theme 2011 NercDokument13 SeitenTheme 2011 NercxainooNoch keine Bewertungen
- Aswathi VidyasagarDokument6 SeitenAswathi VidyasagarSoftroniics IndiaNoch keine Bewertungen
- Pick and Place RobotDokument3 SeitenPick and Place RobotShubhamJain100% (1)
- Color Based Object Sorting Robot Development: A ReviewDokument4 SeitenColor Based Object Sorting Robot Development: A ReviewIJRASETPublications100% (1)
- ENGT5256 Robotics - 20-21 - CourseworkDokument8 SeitenENGT5256 Robotics - 20-21 - CourseworkAYOMIDENoch keine Bewertungen
- Arduino RRLDokument5 SeitenArduino RRLJan Oliver PugalNoch keine Bewertungen
- Micro MouseDokument4 SeitenMicro Mouseblueblaize89Noch keine Bewertungen
- Lessons From The Amazon Picking Challenge: Four Aspects of Building Robotic SystemsDokument10 SeitenLessons From The Amazon Picking Challenge: Four Aspects of Building Robotic SystemsNoCWNoch keine Bewertungen
- Basic of Kalman FilterDokument20 SeitenBasic of Kalman FilterWaseem AsifNoch keine Bewertungen
- The Me 2012 PDFDokument10 SeitenThe Me 2012 PDFZeeshan AbbasiNoch keine Bewertungen
- Localization Control of Lego Mobile RobotDokument6 SeitenLocalization Control of Lego Mobile RobotPravin BeheraNoch keine Bewertungen
- HPC La2-2023qsDokument5 SeitenHPC La2-2023qsashishrajkumar82Noch keine Bewertungen
- GR15 1Dokument95 SeitenGR15 1adharshtbme21Noch keine Bewertungen
- Micro MouseDokument3 SeitenMicro Mouseayush_dewanNoch keine Bewertungen
- DEC50122 - Embedded Robotic: Chapter 4 - MOBILE ROBOTDokument20 SeitenDEC50122 - Embedded Robotic: Chapter 4 - MOBILE ROBOTFaris HamdaniNoch keine Bewertungen
- MHS ReportDokument12 SeitenMHS ReportKhánh Đoan Lê ĐìnhNoch keine Bewertungen
- Milli BotsDokument6 SeitenMilli BotsbvkmohanNoch keine Bewertungen
- Kouretes 2010 SPL Team Description PaperDokument8 SeitenKouretes 2010 SPL Team Description PaperUmer HuzaifaNoch keine Bewertungen
- Millibots - Full LengthDokument14 SeitenMillibots - Full LengthbvkmohanNoch keine Bewertungen
- Design of Ball Collecting RobotDokument6 SeitenDesign of Ball Collecting RobotzahraNoch keine Bewertungen
- Project Report of Robocon 2010 "Robo-Pharaohs Build Pyramids"Dokument14 SeitenProject Report of Robocon 2010 "Robo-Pharaohs Build Pyramids"Diptanil ChaudhuriNoch keine Bewertungen
- Micro MouseDokument9 SeitenMicro MouseenmocrNoch keine Bewertungen
- IEEE Latin American Robotics Competition For Student - 2018/2019Dokument12 SeitenIEEE Latin American Robotics Competition For Student - 2018/2019Erick VLNoch keine Bewertungen
- Fractal Robots by Jaydeep ShingareDokument18 SeitenFractal Robots by Jaydeep ShingareJaydeep ShingareNoch keine Bewertungen
- Motion ControlDokument12 SeitenMotion ControlsufisafiaNoch keine Bewertungen
- Sensor Based Color Identification Robot For Type Casting: Toufeeq AhmadDokument6 SeitenSensor Based Color Identification Robot For Type Casting: Toufeeq AhmadNeil PowellNoch keine Bewertungen
- Automated Object Identifing and Sorting RobotDokument8 SeitenAutomated Object Identifing and Sorting RobotIJRASETPublicationsNoch keine Bewertungen
- Automatic Object Sorting Machine: International Research Journal of Engineering and Technology (IRJET)Dokument6 SeitenAutomatic Object Sorting Machine: International Research Journal of Engineering and Technology (IRJET)Umar FarouqNoch keine Bewertungen
- Sensors 20 05409Dokument19 SeitenSensors 20 05409mezianeNoch keine Bewertungen
- METE461 (Dabalos)Dokument3 SeitenMETE461 (Dabalos)James Edward DabalosNoch keine Bewertungen
- Design and Development of Color and Size Sorting Machine For Spherical ObjectDokument4 SeitenDesign and Development of Color and Size Sorting Machine For Spherical ObjectESP32 CAMNoch keine Bewertungen
- A Pneumatic Conveyor Robot For Color Detection and SortingDokument13 SeitenA Pneumatic Conveyor Robot For Color Detection and SortingAhmad FyzarmanNoch keine Bewertungen
- A Real World Example of FMSDokument7 SeitenA Real World Example of FMSShivangi ThakkerNoch keine Bewertungen
- Pick and Place RobotsDokument16 SeitenPick and Place RobotssvishalnNoch keine Bewertungen
- Computer Vision Based Robotic Arm Controlled Using Interactive GUIDokument18 SeitenComputer Vision Based Robotic Arm Controlled Using Interactive GUIArief HazwanNoch keine Bewertungen
- Design The Shipping Robot With STM32 (PBL4)Dokument2 SeitenDesign The Shipping Robot With STM32 (PBL4)Le Duc AnhNoch keine Bewertungen
- Final Year B.tech-Robotics Lab ManualDokument37 SeitenFinal Year B.tech-Robotics Lab ManualHIRSHITHA RAJEENoch keine Bewertungen
- Unit 1 (Robotics)Dokument11 SeitenUnit 1 (Robotics)Ashwin Prabhu .M VISTASNoch keine Bewertungen
- RoboticsDokument55 SeitenRoboticsMazumder SubhoNoch keine Bewertungen
- AM 8th Sem Solution 17.05.19 in CourseDokument16 SeitenAM 8th Sem Solution 17.05.19 in CourseRaj PatelNoch keine Bewertungen
- Final Destination: A Computer Vision Guided Robotic SystemDokument25 SeitenFinal Destination: A Computer Vision Guided Robotic SystemjitraycNoch keine Bewertungen
- Detection & Distinction of Colors Using Color Sorting Robotic Arm in A Pick & Place MechanismDokument42 SeitenDetection & Distinction of Colors Using Color Sorting Robotic Arm in A Pick & Place MechanismTrinesh GowdaNoch keine Bewertungen
- Prometeo: Beach Cleaner Robot: Oscar Cieza, Carlos Ugarte, Elizabeth Gutiérrez, Javier García, José TafurDokument4 SeitenPrometeo: Beach Cleaner Robot: Oscar Cieza, Carlos Ugarte, Elizabeth Gutiérrez, Javier García, José TafurfrafagaNoch keine Bewertungen
- Autonomous Vacuum CleanerDokument16 SeitenAutonomous Vacuum CleanerNiña Clare Magallon UyNoch keine Bewertungen
- Warehouse Management BOT Using ArduinoDokument6 SeitenWarehouse Management BOT Using ArduinoIJRASETPublicationsNoch keine Bewertungen
- Multifuntioning RobotDokument139 SeitenMultifuntioning RobotshamstouhidNoch keine Bewertungen
- Industrial RobotsDokument15 SeitenIndustrial RobotsLW LuWee ChongNoch keine Bewertungen
- Robotic Forklifts For Intelligent Warehouses: Routing, Path Planning, and Auto-LocalizationDokument7 SeitenRobotic Forklifts For Intelligent Warehouses: Routing, Path Planning, and Auto-LocalizationKhoa Nguyễn AnhNoch keine Bewertungen
- Project Report On Obstacle Avoiding RobotDokument8 SeitenProject Report On Obstacle Avoiding RobotAmit Chakraborty50% (12)
- Fabrication of Automatic Forklift Design For Robotic VehicleDokument6 SeitenFabrication of Automatic Forklift Design For Robotic VehiclesubhashNoch keine Bewertungen
- Algorithm For MicromouseDokument5 SeitenAlgorithm For MicromouseBishwajit KarNoch keine Bewertungen
- Proiect RF (Good2)Dokument57 SeitenProiect RF (Good2)GGM4Noch keine Bewertungen
- New Resampling Algorithm For Particle Filter Localization For Mobile Robot With 3 Ultrasonic Sonar SensorDokument6 SeitenNew Resampling Algorithm For Particle Filter Localization For Mobile Robot With 3 Ultrasonic Sonar SensorWidyawardana AdiprawitaNoch keine Bewertungen
- Do LineDokument48 SeitenDo LineThai Lam Cuong QuocNoch keine Bewertungen
- Design ProcessDokument1 SeiteDesign Processapi-248709933Noch keine Bewertungen
- Trash Bot NewDokument23 SeitenTrash Bot NewBhaswati PandaNoch keine Bewertungen
- Kine Record1Dokument39 SeitenKine Record1Abdul AneesNoch keine Bewertungen
- PrefaceDokument75 SeitenPrefacetricia ona100% (1)
- Gene Bracelet Activity Guide PrintableDokument8 SeitenGene Bracelet Activity Guide PrintableLilian HamzahNoch keine Bewertungen
- Khurana - Review of Ophthalmology-Jaypee Brothers Medical Publishers (2015) PDFDokument178 SeitenKhurana - Review of Ophthalmology-Jaypee Brothers Medical Publishers (2015) PDFasdfasdf100% (5)
- ArtConference BianchiDokument3 SeitenArtConference BianchiMc SweetNoch keine Bewertungen
- Analisis Colorantes HPLCDokument8 SeitenAnalisis Colorantes HPLCLaura Katalina LópezNoch keine Bewertungen
- Principles Of: Logo DesignDokument45 SeitenPrinciples Of: Logo DesignglaidzNoch keine Bewertungen
- Lesson 3.3 Elements and Principles of Art VisualDokument20 SeitenLesson 3.3 Elements and Principles of Art VisualPerly CielyNoch keine Bewertungen
- Singh 2011Dokument11 SeitenSingh 2011Stefan BasilNoch keine Bewertungen
- Syllabus For Summer 2020: CDA Visual Development For Animation Instructor - James Finch and Justin CramDokument5 SeitenSyllabus For Summer 2020: CDA Visual Development For Animation Instructor - James Finch and Justin CramAndyNoch keine Bewertungen
- Mil STD 104CDokument10 SeitenMil STD 104Csam.asaki.hdaNoch keine Bewertungen
- 3 - Book of Prime Entry - CashbookDokument37 Seiten3 - Book of Prime Entry - Cashbooknurzbiet8587Noch keine Bewertungen
- Representing Cultures Through Language and Image: A Multimodal Approach To Translations of The Chinese Classic MulanDokument20 SeitenRepresenting Cultures Through Language and Image: A Multimodal Approach To Translations of The Chinese Classic MulanKevin JacksonNoch keine Bewertungen
- Edition X Color Should Get Might Get Gcmi ShadeDokument2 SeitenEdition X Color Should Get Might Get Gcmi ShadeCADTDDNoch keine Bewertungen
- Gauge StandardsDokument12 SeitenGauge StandardsHector Martinez100% (1)
- Lecture 1Dokument19 SeitenLecture 1Ahsan NazirNoch keine Bewertungen
- Knight SlidesCarnivalDokument28 SeitenKnight SlidesCarnivalnurlisaNoch keine Bewertungen
- 27 Article Text 169 1 10 20191209Dokument13 Seiten27 Article Text 169 1 10 20191209love, rozaNoch keine Bewertungen
- Aiwa Csd-td20 Td21Dokument0 SeitenAiwa Csd-td20 Td21parascoliNoch keine Bewertungen
- Investigation of The Effects of Different Ink Density Values On Color Gamut in Offset PrintingDokument7 SeitenInvestigation of The Effects of Different Ink Density Values On Color Gamut in Offset PrintingLinh TranNoch keine Bewertungen
- Pigments Dyes Product Range2015Dokument29 SeitenPigments Dyes Product Range2015Badre AalamNoch keine Bewertungen
- 02 Homemade Recipes BookDokument102 Seiten02 Homemade Recipes BookAnonymous KUimpSvdNoch keine Bewertungen
- Healing Language and ColoursDokument86 SeitenHealing Language and ColoursSatinder BhallaNoch keine Bewertungen
- 2022 Aecon Condensed Brand GuidelinesDokument1 Seite2022 Aecon Condensed Brand GuidelinesjoyNoch keine Bewertungen
- 01 A Guide For The Political Analysis of MoviesDokument14 Seiten01 A Guide For The Political Analysis of Moviescherry_booomNoch keine Bewertungen
- Fink - Principles-of-Television-EngineeringDokument552 SeitenFink - Principles-of-Television-EngineeringFredji82Noch keine Bewertungen
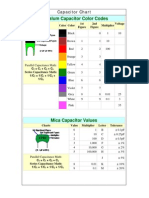
- Capacitor ChartDokument2 SeitenCapacitor ChartmuhibrazaNoch keine Bewertungen
- Waves and LightDokument21 SeitenWaves and LightTheEinsteinofTomorrowNoch keine Bewertungen
- Ingles 1 - Leccion 4Dokument7 SeitenIngles 1 - Leccion 4mIGUELNoch keine Bewertungen
- Ishihara Test For Color BlindnessDokument5 SeitenIshihara Test For Color BlindnessAnupama NagrajNoch keine Bewertungen
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Cyber War: The Next Threat to National Security and What to Do About ItVon EverandCyber War: The Next Threat to National Security and What to Do About ItBewertung: 3.5 von 5 Sternen3.5/5 (66)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyVon EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyBewertung: 3.5 von 5 Sternen3.5/5 (111)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Von EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Bewertung: 5 von 5 Sternen5/5 (34)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (6)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyVon EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyBewertung: 4 von 5 Sternen4/5 (51)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- Mini Farming: Self-Sufficiency on 1/4 AcreVon EverandMini Farming: Self-Sufficiency on 1/4 AcreBewertung: 4 von 5 Sternen4/5 (76)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- AI Superpowers: China, Silicon Valley, and the New World OrderVon EverandAI Superpowers: China, Silicon Valley, and the New World OrderBewertung: 4.5 von 5 Sternen4.5/5 (399)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziVon Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNoch keine Bewertungen
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesVon EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNoch keine Bewertungen
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andVon EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andBewertung: 4.5 von 5 Sternen4.5/5 (709)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceVon EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNoch keine Bewertungen
- Restoration Agriculture: Real-World Permaculture for FarmersVon EverandRestoration Agriculture: Real-World Permaculture for FarmersBewertung: 4.5 von 5 Sternen4.5/5 (86)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (229)
- The Bitcoin Standard: The Decentralized Alternative to Central BankingVon EverandThe Bitcoin Standard: The Decentralized Alternative to Central BankingBewertung: 4.5 von 5 Sternen4.5/5 (41)