Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Lecture 0 - CpE 690 Introduction To VLSI DesignDokument8 SeitenLecture 0 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture 1 - CpE 690 Introduction To VLSI DesignDokument38 SeitenLecture 1 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture 4 - CpE 690 Introduction To VLSI DesignDokument84 SeitenLecture 4 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture 2 - CpE 690 Introduction To VLSI DesignDokument77 SeitenLecture 2 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
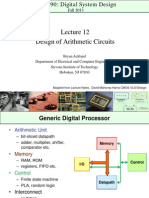
- Lecture 12 - CpE 690 Introduction To VLSI DesignDokument40 SeitenLecture 12 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture 11 - CpE 690 Introduction To VLSI DesignDokument43 SeitenLecture 11 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture 6 - CpE 690 Introduction To VLSI DesignDokument56 SeitenLecture 6 - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture9A - CpE 690 Introduction To VLSI DesignDokument20 SeitenLecture9A - CpE 690 Introduction To VLSI DesignjvandomeNoch keine Bewertungen
- Lecture 10 - CpE 690 Introduction To VLSI DesignDokument54 SeitenLecture 10 - CpE 690 Introduction To VLSI Designjvandome100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Wine TourismDokument9 SeitenWine Tourismyarashovanilufar1999Noch keine Bewertungen
- Engineering Management: Class RequirementsDokument30 SeitenEngineering Management: Class RequirementsMigaeaNoch keine Bewertungen
- FT2020Dokument7 SeitenFT2020Sam SparksNoch keine Bewertungen
- CHAPTER 2 Part2 csc159Dokument26 SeitenCHAPTER 2 Part2 csc159Wan Syazwan ImanNoch keine Bewertungen
- Analisis Kebutuhan Bahan Ajar Berbasis EDokument9 SeitenAnalisis Kebutuhan Bahan Ajar Berbasis ENur Hanisah AiniNoch keine Bewertungen
- SSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Dokument22 SeitenSSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Ivy JeanneNoch keine Bewertungen
- Engineering Ethics in Practice ShorterDokument79 SeitenEngineering Ethics in Practice ShorterPrashanta NaikNoch keine Bewertungen
- Sim Uge1Dokument62 SeitenSim Uge1ALLIAH NICHOLE SEPADANoch keine Bewertungen
- (EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing SteelDokument24 Seiten(EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing Steelbagusu_6Noch keine Bewertungen
- E7d61 139.new Directions in Race Ethnicity and CrimeDokument208 SeitenE7d61 139.new Directions in Race Ethnicity and CrimeFlia Rincon Garcia SoyGabyNoch keine Bewertungen
- Sprinkler Sizing en v1Dokument12 SeitenSprinkler Sizing en v1CristianDumitru0% (1)
- Title: Smart Monitoring & Control of Electrical Distribution System Using IOTDokument27 SeitenTitle: Smart Monitoring & Control of Electrical Distribution System Using IOTwaleed HaroonNoch keine Bewertungen
- 7 - Monte-Carlo-Simulation With XL STAT - English GuidelineDokument8 Seiten7 - Monte-Carlo-Simulation With XL STAT - English GuidelineGauravShelkeNoch keine Bewertungen
- Rankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothDokument111 SeitenRankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothphysicsNoch keine Bewertungen
- Unit 2: Air Intake and Exhaust SystemsDokument10 SeitenUnit 2: Air Intake and Exhaust SystemsMahmmod Al-QawasmehNoch keine Bewertungen
- Core CompetenciesDokument3 SeitenCore Competenciesapi-521620733Noch keine Bewertungen
- File RecordsDokument161 SeitenFile RecordsAtharva Thite100% (2)
- Ilovepdf MergedDokument503 SeitenIlovepdf MergedHemantNoch keine Bewertungen
- Test On Real NumberaDokument1 SeiteTest On Real Numberaer.manalirathiNoch keine Bewertungen
- solidworks ขั้นพื้นฐานDokument74 Seitensolidworks ขั้นพื้นฐานChonTicha'Noch keine Bewertungen
- Accessoryd-2020-07-31-185359.ips 2Dokument20 SeitenAccessoryd-2020-07-31-185359.ips 2Richard GarciaNoch keine Bewertungen
- Polysep... Sized For Every Application: Psg-7 Psg-15 Psg-30 Psg-60 Psg-90Dokument1 SeitePolysep... Sized For Every Application: Psg-7 Psg-15 Psg-30 Psg-60 Psg-90Carlos JiménezNoch keine Bewertungen
- Prediction of Compressive Strength of Research PaperDokument9 SeitenPrediction of Compressive Strength of Research PaperTaufik SheikhNoch keine Bewertungen
- Tomb of Archimedes (Sources)Dokument3 SeitenTomb of Archimedes (Sources)Petro VourisNoch keine Bewertungen
- Transfert de Chaleur AngDokument10 SeitenTransfert de Chaleur Angsouhir gritliNoch keine Bewertungen
- OTP User Manual For English) v1,0Dokument15 SeitenOTP User Manual For English) v1,0auyinNoch keine Bewertungen
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDokument2 SeitenDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonNoch keine Bewertungen
- Sheet-Metal Forming Processes: Group 9 PresentationDokument90 SeitenSheet-Metal Forming Processes: Group 9 PresentationjssrikantamurthyNoch keine Bewertungen
- Importance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesDokument61 SeitenImportance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesjrtnNoch keine Bewertungen
- L 11Dokument3 SeitenL 11trangNoch keine Bewertungen