Beruflich Dokumente
Kultur Dokumente
Initiation Labview + TPs 2010
Hochgeladen von
Kesraoui HichemCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Initiation Labview + TPs 2010
Hochgeladen von
Kesraoui HichemCopyright:
Verfügbare Formate
P Breuil 2010
Axe Instrumentation 2010
Travaux pratiques dInstrumentation Numrique
1. GENERALITES .................................................................................................................................. 3
1.a Droulement des TPs ....................................................................................................................... 3
1.b Contenu de ce document : ................................................................................................................ 4
2. INTRODUCTION A LABVIEW ....................................................................................................... 5
2.a Introduction ...................................................................................................................................... 5
2.b Aide .................................................................................................................................................. 5
2.c Construction dun premier instrument virtuel : ................................................................................. 5
2.d Principes de Labview ....................................................................................................................... 7
2.e Techniques de dbogage : ................................................................................................................ 8
2.f Les structures (Palette Structures): ................................................................................................... 8
2.g Sous VIs ......................................................................................................................................... 14
2.h Conclusion :.................................................................................................................................... 15
3. LECHANTILLONNAGE ............................................................................................................... 17
3.a La discrtisation dans le temps : ..................................................................................................... 18
3.b La discrtisation de la grandeur mesure : ..................................................................................... 18
3.c Le thorme de la moyenne : .......................................................................................................... 19
4. TP N1 REGULATION NUMERIQUE DE TEMPERATURE .................................................... 21
4.a Principe gnral: ............................................................................................................................. 21
4.b Dispositif, action et mesure : .......................................................................................................... 22
4.c Identification du processus : ........................................................................................................... 23
4.d La rgulation PID : ......................................................................................................................... 25
4.e Mesure de la temprature de llment chauffant: ( faire si la partie PID est termine) ........... 28
5. TP N2: DETECTION SYNCHRONE ............................................................................................ 31
5.a But: ................................................................................................................................................. 31
5.b Prambule : Analyse frquentielle & signaux priodiques ........................................................... 31
5.c Quelques outils disponibles : .......................................................................................................... 33
5.d VIs raliser : ................................................................................................................................ 34
6. TP N3 : LIAISONS NUMERIQUES / ETALONNAGE .............................................................. 39
6.a Introduction : .................................................................................................................................. 39
6.b Prambule : Incertitude de mesure, rgression linaire .................................................................. 39
6.c Utilisation dune liaison srie RS232 : ........................................................................................... 43
6.d Premire ralisation: milliVoltmtre .............................................................................................. 46
6.e Deuxime ralisation : balance numrique ..................................................................................... 46
6.f Annexe : fonction Excel DROITEREG .................................................................................... 49
INST
R
U
M
E
N
T
A
T
ION
A
X
E
2
3
1. Gnralits
1.a Droulement des TPs
Ces travaux pratiques ont une dure de 7 sances de 3 heures. La premire sance,
dinitiation lenvironnement Labview, ne sera pas value.
Les 6 autres seront partages en 3 TPs tournants, chaque TP de 2 sances faisant lobjet
dune valuation spare.
Planning des TPs en fonction des groupes de binmes :
Sances TP1 : Rgul. temprature TP2 : dtection synchrone TP3 : Liaison numrique,
calibrage
2 et 3 A1, A2, A3 A4, A5 A6, A7
4 et 5 A6, A7 A1, A2, A3 A4, A5
6 et 7 A4, A5 A6, A7 A1, A2, A3
Au cours de ces 3 TPs, les lves construiront un ou des programmes (Ou V.I. = Virtual
Instrument) qui seront sauvs sur le disque dur dans le rpertoire Mes Documents\xx o
xx est le nom du binme (ex : A2). Si plusieurs VIs sont demands, chacun pourra tre cons-
truit partir du prcdent mais sera sauvegard sparment sous un nom explicite et non fan-
taisiste.
Le travail demand est dans les zones de texte encadres et grises de
ce document.
Les VIs seront abondamment comments, et les rsultats complmentaires (rponses aux
questions, calculs hors labview etc) seront fournis sous forme de fichier Word ou Excel
(notamment pour les TPs 1 : courbes de rponse et 3 : calculs et donnes dtalonnage)
Remarque : il est impossible, pour des raisons pratiques et de licence de travailler
sur les VIs en dehors des sances de TPs.
Il sera tenu compte lors de lvaluation, de la dmarche et de lautonomie des lves, du
travail dquipe, et il nest pas forcment ncessaire de tout raliser pour obtenir une bonne
note.
Ces sances doivent tre considres comme du contrle continu, cest dire que le
travail ne doit tre fait que pendant le temps imparti. Il sera aussi tenu compte, lors de
l'valuation, des retards et absences non justifis.
Enfin, du matriel informatique et lectronique parfois onreux ou pouvant prsenter des
dangers (rares !) est mis disposition : il est vivement recommand aux lves de toujours
agir en connaissance de cause (une documentation complte peut tre mise leur disposition).
4
1.b Contenu de ce document :
Le chapitre 1 contient un tutorial Labview qui sera excut pendant la premire sance,
non value.
Le chapitre 2 lchantillonnage , contient les principales rgles et proprits de
lchantillonnage, il est ncessaire de lavoir assimil avant daborder le premier vrai
TP (donc avant la deuxime sance).
Les 3 autres chapitres sont relatifs aux 3 TPs et ne seront donc pas forcment vu dans
lordre. Il est trs fortement conseill de les avoir lu, et den avoir assimil les gnralits,
avant daborder le TP correspondant.
En tout tat de cause, ne pas se lancer dans la programmation des instruments avant
davoir lu et compris le document correspondant.
5
2. Introduction Labview
2.a Introduction
Labview est un logiciel dvelopp par National Instruments pour linstrumentation. Il se
caractrise par une programmation entirement graphique.
De trs nombreuses fonctions sont disponibles, notamment pour la gnration,
lacquisition et le traitement du signal. Pensez explorer les diffrents menus avant de r-
crire les fonctions qui existent peut-tre dj.
(Pensez aussi utiliser les menus popup (ou surgissant ) avec le bouton droit de la
souris.
2.b Aide
2 possibilits daide en ligne:
La fentre daide : menu Aide Visualiser laide ou Ctrl-H : si cette aide est active, il
suffit de placer le curseur sur un lment pour avoir une aide simplifie.
Pour une aide plus complte : menu Aide rfrence en ligne (et notamment Labview
Rfrence - Functions & VIs).
Le jeu de manuels Labview est votre disposition.
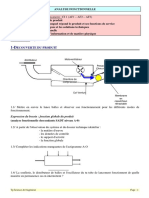
2.c Construction dun premier instrument virtuel :
Cliquer sur Nouveau puis VI vide . 2 fentres composant un instrument virtuel
(VI = Virtual Instrument )sont alors cres :
Une face avant (initialement grise) reproduisant les diffrents contrles (action de
lutilisateur vers linstrument, donc entre dune variable) et les diffrents indicateurs (visuali-
sation dune variable).
6
Un diagramme fonctionnel (initialement blanc) o lon retrouve les contrles, les indica-
teurs ainsi que des oprateurs. Ce diagramme est le programme.
On peut passer de lun lautre par Ctrl-E ou par le menu Fentres.
Faire apparatre, si ce nest dj fait, la palette doutils (Fentre / Palette doutils) :
On va raliser un instrument qui affiche une valeur saisie laide dun bouton et bruite.
Ouvrir un nouveau VI (Fichier - Nouveau). Cliquez-droit dans la fentre face
avant (fond gris) pour ouvrir un menu popup Commandes . Choisissez
un indicateur de type Vumtre dans la palette Numrique et baptisez
le Signal , soit immdiatement aprs sa cration soit en utilisant loutil
ddition chane . Faire apparatre lafficheur numrique en cliquant avec le
bouton droit sur le Vu-mtre et en choisissant lments visibles / afficheur
numrique
Graduez le Vumtre de 0 100 ( laide de ou ).
Faire la mme chose avec un bouton rotatif.
Basculez sur la fentre diagramme fonctionnel (Ctrl-E) ( diagramme , la blanche).
Les 2 lments cres apparaissent. Le premier est un indicateur , servant visualiser
une variable, le deuxime une commande , servant saisir une variable.
Modification Contrle (ex-
cution et dition)
Cration connexion
Edition chanes (dition seulement)
+ cration de commentaires
Sonde
Point darrt
Gestion des couleurs
Dplacement & redimensionnement
(dition seulement)
Choix automatique de loutil
7
cliquez-droit dans la fentre et dans le menu Numrique , placer les 3 op-
rateurs (multiplieur, additionneur et alatoire) et la constante ( ), comme
ci-dessous. Remarquez quen promenant le curseur de la souris, celui-ci
change de forme ( ) lorsquil passe sur des zones sensibles des lments
dits terminaux . En cliquant, placez les cables comme ci-dessous.
Il est pratique douvrir la fentre Help (Ctrl-H) pendant cette tape pour voir plus prcis-
ment les connecteurs des objets que lon soude : en effet, ils clignotent dans cette fentre lors-
que lon passe dessus avec loutil cblage.
Raccourci : Pour crer et cbler plus rapidement une constante sur une entre dun sous-
VI ou dun oprateur, il est possible de faire un click droit avec loutil puis utiliser le
sous menu Crer / Constante , on peut alors saisir la valeur de la constante si la valeur par
dfaut nest pas la bonne. Il est possible, de la mme manire, de crer et cbler un contrle
sur une entre dun sous-VI ou un indicateur sur une sortie dun sous-VI. Il sont alors
cres sur la face avant (mais nimporte o !).
Excuter avec lun ou lautre des boutons ou .
(Attention, il ne sagit que dune simulation, pour le moment)
Notez, partir de la palette fonctions de la fentre diagramme fonctionnel et de ses
sous-palettes, la trs grande quantit de fonctions disponibles (plusieurs centaines).
2.d Principes de Labview
Les objets placs sur la face avant sont les variables du programme (A part bien sur les
dcorations). Ils peuvent tre soit des contrles, ou variables dentre, qui permettent
loprateur de rentrer des donnes, soit des indicateurs, ou variables de sorties, qui per-
mettent de visualiser des donnes.
Le diagramme contient, outre les reprsentations des contrles et indicateurs, des opra-
teurs ou sous-VIs que lon peut considrer comme les procdures du programme. Ces l-
ments sont relis par des connexions qui reprsentent les flux de donnes : ces flux sont
sortant pour les contrles, rentrants pour les indicateurs et rentrant et/ou sortant pour les op-
rateurs et sous-VI.
Contrle 1
Contrle 2
Sous-VI 1
Indicateur 1
Sous-VI 2
Indicateur 2
constante
indicateur
oprateurs
Commande
8
La condition ncessaire pour quun oprateur soit excut (et donc que ses sorties soient
ensuite disponibles) est que toutes ses entres soient disponibles. Il en est de mme pour les
indicateurs. Ainsi, dans lexemple prcdent, lindicateur Vumtre est dpendant de
loprateur addition, lequel est dpendant du bouton et du multiplicateur .
Labview est multitches , ce qui signifie que plusieurs groupes dlments sans relation
de dpendance entre eux seront excuts simultanment .
2.e Techniques de dbogage :
Sondes
Afficher le diagramme pendant lexcution dun VI. Faites surgir un menu popup dun fil
du programme que vous avez ralis et choisissez "Sonde". La sonde affiche en permanence
les donnes correspondant la liaison o elle est attache.
Observation des flux de donnes
Revenir au diagramme. Cliquer sur le bouton ampoule pour qu'elle s'allume. Lancer
l'excution. Des points mobiles indiquent le flux des donnes le long des connections. Egale-
ment, des indications sur les valeurs sortantes apparaissent sur les noeuds actifs.
Une exprience de ce type montre bien la logique de la squencialit dans Labview.
Chaque noeud peut sexcuter ds que toutes les donnes sont arrives aux bornes dentre.
La disposition gomtrique des noeuds dans le diagramme na aucune influence.
Il existe aussi des possibilits de point darrt.
2.f Les structures (Palette Structures):
Boucle While (tant que)
Compltons le VI prcdent. Un slecteur en face avant permettra dajuster
la priode daffichage entre 0 et 2 s et un interrupteur permettra darrter.
Disposer les lments en face avant suivant le schma ci-dessous. Lafficheur est du type
graphe droulant (menu popup Commandes - Graphes). Cest donc un affichage point par
point, contrairement graphe qui affiche tout un tableau dun seul coup.
9
Le diagramme sinscrit dans une boucle While : (en fait, while not)
(palette structures , cliquer puis glisser autour des lments)
Il y a une borne lecture dindex et une borne criture de condition de fin de boucle .
La boucle sexcute tant que le boolen branch sur est false .
Le diagramme raliser est le suivant :
Lensemble plac dans une structure fait en sorte que la dure totale
dune itration de cette structure soit au minimum de 500 ms.
Il peut arriver quil soit ncessaire de changer un contrle en indicateur ou rciproque-
ment, cela se fait par le menu popup. Remarquer que les contrles sont reprsents par un trait
plus gras. Remarquer aussi, dans le premier cas ci-dessous, le trait pointill indiquant un pro-
blme, ainsi que la flche brise , en haut gauche de la fentre.
Commentaire (double
click)
Graphe droulant
Contrle
Numrique
Contrle
Boolen
Temps & Dia-
logue / attendre...
Commentaire (Dble
click)
10
Cliquer alors sur pour avoir des explications sur les causes du problme. Les fils
mauvais (en pointill) superflus (et parfois bien cachs) peuvent tous tre effacs avec
Edition / Supprimer les fils incorrects ou Ctrl B.
Remarquez que les couleurs correspondent aux types : bleu = entier, orange = rel, violet =
string, vert = boolen.
Nous allons maintenant chercher afficher, en plus, la valeur moyenne de toutes les va-
leurs depuis le dbut :
Il faut donc que dans chaque itration de la boucle on ait accs la valeur de
la somme lors de litration prcdente. Cela se fait en utilisant un registre
dcalage que lon fait apparatre partir dun popup ( clic droit) sur un des
bords verticaux de la boucle : Slectionner Ajouter un registre dcalage .
Il apparat les symboles et sur ces bords. La borne de droite est
lentre o lon va brancher la valeur de somme actuelle, celle de gauche
est la sortie o la rcupre la mme valeur mais de litration prcdente.
Ce registre doit tre initialis par la gauche lextrieur de la boucle.
Le diagramme obtenir est le suivant :
Lafficheur peut accepter plusieurs entres si elles sont regroupes en cluster (ensemble
de variables pouvant tre de types diffrents, struct du C).
Le diagramme ci-dessus contient une petite erreur
De retour sur la face avant, vous pouvez personnaliser votre afficheur en lui rajoutant dif-
frentes options afin dobtenir quelques chose ressemblant :
Valeur initiale
Index de
boucle
Cluster / Assembler)
Permet dafficher plu-
sieurs graphes
11
On a affich ici la lgende et la palette de lafficheur (menu popup). La lgende est
redimensionnable la souris, noubliez pas son menu popup.
Boucle N fois (For Loop)
Cette boucle effectue un certain nombre de fois ce quelle contient :
est la borne dentre o lon cble le nombre ditrations dsir,
est la borne de sortie indiquant lindice de litration en cours.
Cette structure accepte aussi la temporisation ainsi que les registres dcalage.
On peut traiter facilement les lments dun tableau que lon cble directement travers la
structure :
(ne pas raliser)
Ce VI calcule et affiche la racine carre des lments dun tableau
gauche, un tableau rentre dans la boucle par un tunnel . Le trait pais reprsentatif
d'un tableau unidimensionnel s'est transform en trait fin correspondant la i-ime valeur du
tableau. La borne N de la structure n'est pas connecte. Le nombre d'itrations est dtermin
Analyse/Traitement du
signal / gnration de
signaux / motif de
rampe
12
automatiquement d'aprs la taille du tableau. Inversement, quand on connecte un scalaire
l'intrieur de la boucle vers l'extrieur, on rcupre automatiquement un tableau de dimension
N; dans la figure ci-dessus, cela correspond la sortie d'une connexion droite vers un affi-
cheur graphique.
Ce processus (auto-indexing) peut tre dsactiv par l'option "Dsactiver lindexation" du
menu popup du tunnel (petit rectangle noir sur le bord de la structure, o les connexions pn-
trent).
Ne pas raliser cet exemple pdagogique lefficacit douteuse : En effet, on au-
rait pu faire lconomie :
- Soit du gnrateur de rampe en connectant lindice de boucle la racine carre,
- Soit de la boucle en connectant directement loprateur racine carre sur le
tableau. Ainsi, beaucoup de traitements de tableaux peuvent tre faits sans pas-
ser par des oprations lment par lment ; par exemple, additionner 2 ta-
bleaux de mme taille se fait simplement avec un oprateur addition. On peut
aussi faire des oprations mixtes scalaire/tableau (par exemple multiplier tous
les lments dun tableau par une mme constante).
Raliser un VI affichant ( laide dun grapheXY ) sous forme de courbe pa-
ramtre 100 points, un cercle. On devra alors construire 2 tableaux (X et
Y) et les assembler (cf aide Ctrl H ).
Structure Condition (Case ou If then Else)
Cest une fentre multifaces laquelle doit tre reli un boolen (issu souvent dun op-
rateur comparaison, la fentre a alors 2 faces : true et false ), soit un entier (autant de
faces que lon veut, quivalent du Case du Pascal).
(ne pas raliser)
13
Application : Raliser le bornage suprieur, ou crtage (limitation une va-
leur maxi) puis laffichage dun signal sinusodal . Ne pas leffacer afin de
lutiliser un peu plus loin.
Structure Squence
Le diagramme suivant contient 3 lments totalement indpendants (et bidons..., ne pas le
raliser). Rien ne permet de savoir dans quel ordre ces 3 lments seront excuts, ils seront
mme probablement excuts simultanment :
(ne pas raliser)
Si cet ordre est important pour le bon droulement du programme, on doit alors utiliser
une structure squence :
(ne pas raliser)
On peut rajouter, supprimer ou dplacer des tapes avec un click droit sur un bord de la
squence.
Des variables peuvent tre passes dun tape aux tapes suivantes avec un click droit sur
un bord et Ajouter une variable locale de squence .
Pas dexemple raliser !
Structure formule
Il peut tre parfois fastidieux de cbler une formule complexe. Aussi les concepteurs
de Labview ont prvus une exception la programmation graphique : La structure Boite de
calcul permet de taper directement une formule.
Le menu popup sur le bord de la structure permet de crer les lments entre et sor-
tie . Les textes identificateurs que lon doit mettre dans ces bornes doivent tre repris
lintrieur pour taper la formule.
Chaque formule doit se terminer par ; , voir laide Ctrl H pour connatre les opra-
teurs et fonctions disponibles.
14
Vous pouvez raliser le VI suivant, qui contient une erreur de syntaxe dessus
que vous essaierez de rsoudre avec laide en ligne :
dont le diagramme est :
Remarquer que les 2 tableaux unidimensionnels (vecteurs) sont runis en un tableau bidi-
mensionnel (matrice) grce Construire un tableau ( dans Tableaux redimen-
sionn la souris).
2.g Sous VIs
Il est possible de transformer facilement tout ou une partie dun VI en un sous-VI
(fonction avec passage de variables par valeur) utilisable dans un autre VI appelant.
Dans ce cas, tout ou une partie des contrles seront les variables dentre du sous-VI, et les
indicateurs deviendront les variables de sortie.
Pour cela, Slectionner la partie du diagramme transformer en sous-VI, menu Edition /
Crer un sous-VI . Le sous VI est cr, vous pouvez, en cliquant-droit sur licne en haut
droite de la face avant modifier les connecteurs ou redessiner licne. Il est alors ncessaire
denregistrer le sous-VI.
Tableau unidi-
mensionnel
Tableau bidimen-
sionnel
15
Le sous-VI peut tre utilis partir de la fentre diagramme du VI appelant grace au
bouton du menu popup Fonctions qui permet de charger tout fichier VI.
Exemple: Raliser un sous VI crtage laide du VI ralis plus haut (3 entres et
1 sortie).
Important : par dfaut, Labview ne sauve pas les valeurs des controles, mme si
elles ont t modifies. Pour conserver de nouvelles valeurs (qui deviendront celles par
dfaut), cliquer sur le menu Execution / Dsigner les valeurs actuelles par dfaut puis
enregistrer le VI.
2.h Conclusion :
Vous connaissez maintenant environ 10% des possibilits de Labview, alors explorez, d-
roulez les menus, surgissez les popup !
Pour approfondir :
livre tutorial , en Franais ,
Les excellents exemples de ni\Labview\exemples\
Les manuels de rfrence.
16
17
3. lchantillonnage
Ces lments constituent un minimum vital pour effectuer correctement les TPs. Ils ont
t ou seront prochainement dvelopp en cours. Nhsitez pas demander des explications
ou des complments dinformation.
Lchantillonnage est lopration qui consiste faire lacquisition dun signal laide
dun systme numrique.
Soit un signal continu rel (tension par exemple) V(t) : lchantillonnage va consister
numriser priodiquement la valeur de ce signal. On effectue alors une double discrtisa-
tion de ce signal :
Discrtisation dans le temps : le signal ne sera connu que toutes les T secondes, T
tant la priode dchantillonnage, et le nombre de points acquis sera fini (pour une
dure dacquisition finie),
Discrtisation de la grandeur mesure : Apres numrisation, une valeur correspond
toujours un nombre fini de bits (ou doctets), dautre part la plage de mesure
dun dispositif dchantillonnage est finie, par consquent, le nombre de valeurs mesu-
rables diffrentes est aussi fini. Le plus petit cart mesurable est la rsolution du
dispositif.
p
l
a
g
e
d
e
m
e
s
u
r
e
V
0
grandeur mesure (ex: tension)
temps
priode d'acquisition T
dure de l'acquisition t
rsolution
Discrtisation dans
le temps
Discrtisation de la
grandeur mesure
18
Ces discrtisations sont donc des sources derreurs :
3.a La discrtisation dans le temps :
Lutilisateur peut gnralement choisir la frquence dchantillonnage (inverse de la p-
riode), jusqu une limite suprieure, fonction du matriel utilis (TPs 1 et 2 : carte
dacquisition, 200 kHz, TP3 : module dacquisition , une acquisition toutes les 60 ms).
Si le signal chantillonn est rapidement variable, son chantillonnage peut alors poser
quelques problmes. Un chantillonnage sera dit correct si lon peut, partir des seuls points
chantillonns, reconstituer le signal (par exemple par interpolation entre les points) . Sup-
posons que ce soit un signal sinusodal de frquence f : Le thorme fondamental de
lchantillonnage, dit thorme de Shannon , nous dit que :
Lchantillonnage dun signal de frquence f doit se faire avec une frquence
dchantillonnage Fs suprieure 2f.
Le non suivi de cette rgle essentielle entrane pratiquement coup sur des rsultats aber-
rants.
Lillustration et la justification pratique de ce thorme seront vus durant le TP2, la d-
monstration sera vue pendant le cours dUP1
3.b La discrtisation de la grandeur mesure :
La discrtisation intervient lorsque les valeurs finales constituent un ensemble discret. On
peut alors dfinir un pas de mesure (ou parfois digit, ou LSB, Least Significant Byte) qui est
le plus petit cart mesurable.
Cest la rsolution du systme dacquisition, ne pas confondre avec lincertitude, ou la
sensibilit.
On introduit alors une erreur alatoire,
dite erreur de discrtisation.
19
On montre que son cart-type est :
3 2
=
d
3.c Le thorme de la moyenne :
De plus en plus souvent, le systme dacquisition est utilis a des performances permettant
davoir une frquence dacquisition grande par rapport la cadence dacquisition ncessaire
pour une application donne. Ainsi, pour le TP1 (rgulation de temprature), 10 mesures par
seconde suffisent alors que le systme est capable dchantillonner 200 kHz !
On peut mettre profit ces capacits en moyennant un grand nombre de mesures, en ef-
fet, le thorme de la moyenne nous indique que :
Si lon prend comme nouvelle mesure la moyenne de n mesures lmentaires conscu-
tives :
=
n
i
x
n
x
1
1
Si ces n mesures ont une composante derreur alatoire et indpendante dcart-type ,
Alors lcart-type de la contribution de cette erreur sur la moyenne scrit :
Ceci permet de rduire considrablement la composante alatoire et indpendante de
lerreur (appele parfois bruit ), mais est bien sur sans effet sur les autres sources derreur
(erreur dtalonnage, drives lentes etc). De plus, lacquisition dure n fois plus longtemps.
4.7
4.75
4.8
4.85
4.9
4.95
5
5.05
5.1
5.15
5.2
0 10 20 30 40 50 60 70
V brut
moyenne sur 5 points
n
x
x
) (
) (
=
20
21
4. TP N1 Rgulation numrique de temprature
4.a Principe gnral:
Le but de la rgulation de temprature est de maintenir la temprature T(t) d'un systme la
plus proche possible d'une temprature Tc(t) dite de consigne (choisie par l'utilisateur et pou-
vant tre variable), et dans de bonnes conditions de stabilit. La rgulation se fait en 3 tapes:
Mesure de la temprature T(t) laide dun Convertisseur Analogique Numrique
(CAN).
Calcul de l'action P(t) appliquer au processus (= puissance de chauffage) par un algo-
rithme appropri .
Application de cette action laide dun Convertisseur Numrique Analogique
(CNA).
Ce cycle est appliqu priodiquement avec une priode dite priode de rgulation, inf-
rieure la seconde dans ce cas.
Les notions vue au cours de ce TP seront acquises plus en dtail lors du cours dUP3, on
pourra voir aussi : http://www.emse.fr/~pbreuil/auto/index.htm
22
4.b Dispositif, action et mesure :
On dispose dune micro-plaquette chauffante (partie mesure : maxi environ 200C, atten-
tion, llment chauffant peut atteindre 800C !) dont on peut mesurer la temprature laide
dun thermocouple.
La plaquette est chauffe par une source de tension issue de la voie 0, amplifie en cou-
rant, du convertisseur numrique analogique 0 10 V. Il est donc possible de piloter la
puissance de chauffage laide de Labview.
On utilise pour la mesure de temprature un thermocouple de type K (Chromel Alumel)
coll prs de la source de chaleur. Un thermocouple est un capteur fournissant une tension
sensiblement proportionnelle la diffrence de temprature entre le point chaud ( soudure
chaude ) et la soudure avec le reste du circuit ( soudure froide ). Lintrt du thermocouple
est quil permet de mesurer jusqu plus de 1200 C.
Mais il ne mesure quune diffrence de temprature, il est donc ncessaire de connatre
la temprature T0 de la soudure froide, proche de lambiante, laide dun autre capteur
(dit CSF Compensation de Soudure Froide ), de type LM35 fournissant une tension pro-
portionnelle la temprature T0, mais ne fonctionnant quen dessous de 100 C.
T T0
"soudure chaude"
"soudure froide"
Chromel
Alumel
Cuivre
Cuivre
voie 0: T-T0
voie 1: T0
capteur CSF
Le signal du thermocouple (type K , soit environ 40 V/C) est envoy sur la voie 0 du
convertisseur analogique numrique (carte 6024 de National Instruments).
Carte dacquisition
Plaquette
chauffante
Thermocouple
PC
CNA
CAN
Ampli cou-
rant
Capteur temp.
ambiante
soudure
froide
23
De mme, la voie 1 reoit le signal de soudure froide issu dun capteur semi-
conducteur (dit de type IC , il sagit ici dun LM35 dlivrant 10 mV/C).
Raliser un VI permettant dmettre une action provenant dun contrle et de
visualiser lvolution de la temprature. On essaiera damliorer le rapport Si-
gnal/Bruit de la mesure tout en veillant ce que celle-ci reste de courte dure
(< 100 ms). Pour cela, on exploitera le thorme de la moyenne (p 19).
Vrifier et ventuellement corriger loffset du thermocouple (valeur de ten-
sion froid qui doit tre nulle)
On veillera aussi, et ceci est valable pour les exercices suivant, ce que
larrt du programme par un bouton adquat provoque larrt du chauffage.
Les outils ncessaires lacquisition et laction sont dans les palettes Acquisition de
donnes / Entres analogiques, Sorties analogiques, Conditionnement de signaux :
Outils dacquisition avec carte National Instruments : La carte dacquisition est du type
NI-PCI 6024E (caractristiques en annexe 2) qui utilise des outils situs dans le menu :
Mesure NI / DaqMX
Pour toute opration dacquisition ou de gnration, on utilisera plutt loutil de
lassistant DAQ disponible dans le menu de fonctions (Mesures NI / DAQMX
/ Assistant DAQ ). Il suffit alors de choisir Entre analogique (mesure de tension) ou
Sortie analogique (gnration de tension), puis Tension , puis de slectionner la ou les
voie(s) utilises, dans le bon ordre (slection multiple avec touche Ctrl). Modifier alors ven-
tuellement la ou les gammes dentres, le nombre de points ( chantillons lire et la fr-
quence dchantillonnage (maxi 200000 Hz) .
Les 2 mesures de tension seront alors converties en temprature laide de loutil Me-
sure NI / Acquisition de donnes / Conditionnement de signaux :
Calcul temprature partir des signaux du
thermocouple et du CSF. Cliquer avec le bou-
ton droit sur les connecteurs de type de capteur
et slectionner crer une constante afin de
pouvoir choisir le type.
4.c Identification du processus :
Processus Action X(t) Mesure Y(t)
24
La fonction de transfert dun processus permet de calculer la mesure Y(t) en fonction de
laction X(t). Son tude thorique fait appel la transforme de Laplace pour les systmes
continus et la transforme en Z pour les systmes chantillonns (qui seront vu dans le cadre
de lUP2).
Lidentification est une modlisation de comportement du processus qui permet dcrire
la fonction de transfert et de rgler facilement les algorithmes de rgulation. Elle se fait en
2 tapes :
1 : Dtermination du type de loi physique laquelle obit le processus : Dans notre
cas, un processus de type Ordre 1 plus retard (systme obissant une quation diffren-
tielle dordre 1, suivi dun retard pur, cas le plus courant) est une bonne approximation :
dt T T
G
dt t P CdT
s
) (
1
) (
0
= , avec un temps de retard t
r
(C = capacit calorifique, P=puissance, T
0
=T ambiante)
Le retard t
r
est fonction de la conductivit thermique, de la capacit calorifique et de la
gomtrie.
La rponse une action chelon (P(t)=0 si t<0 et P(t)=P si t>0) est dans ce cas:
|
\
|
+ =
tr t
P G T P G t T
s s
exp ) ( ) (
0
(1) avec
S
G C =
2 : Dtermination des constantes du modle partir de la rponse un chelon
daction. Par soucis de simplification, on considrera par la suite que laction est la tension
applique V (au lieu de la puissance P).
P(t)
T(t)
25
Les 3 paramtres valuer sont donc :
G
s
, gain statique car T=G
s
V lorsque le rgime permanent est atteint (On suppose que
la loi T=f(V) est linaire, ce qui est gnralement une grossire approximation, et quil
ny a pas de perturbations, en fait, le gain statique dpendra un peu de la temprature).
, constante de temps du systme : Si C est la capacit calorifique, alors =CG
s
.
peut tre dtermine partir de la tangente au point de dpart, si lon connat le gain
statique, ce qui nest pas toujours vident.
t
r
, retard pur du systme (not parfois t
d
, delay ) : il dpend de la conductivit
thermique des matriaux et de la gomtrie du systme, notamment de la distance
entre la source de chauffage et le capteur. De plus, on peut considrer, en premire ap-
proximation, que la priode de rgulation, t, sajoute au retard.
Travail effectuer :
On considrera que la plaquette est un ordre 1 avec retard : Dterminer
graphiquement
*
les 3 paramtres G
s
, t
r
et laide dun VI permettant de vi-
sualiser la rponse un chelon denviron 50% de la puissance maxi. On soi-
gnera tout particulirement le retard qui, bien que faible, a une influence
capitale sur la stabilit de la rgulation. Ces paramtres seront utiliss plus
loin.
Il est possible denregistrer les couples (temps, temprature) dans un fichier lisible par Ex-
cel (facile avec E/S fichiers / crire dans un fichier tableur ).
4.d La rgulation PID :
Afin de simplifier, on prendra comme action la tension de chauffage V(t) au lieu de la
puissance. On pourra discuter de la pertinence de cette approximation.
La rgulation PID est lalgorithme de
rgulation le plus utilis. Laction PID est
en fait la somme de 3 actions :
Laction Proportionnelle ("P"):
L'action P est proportionnelle l'cart
e(t) entre la consigne et le signal:
V(t)=Kp(Tc(t)-T(t))=K*e(t)
*
Il est possible de dterminer ces paramtres plus rigoureusement par une mthode de moindres carrs qui
sera (re)vue en TDs de rgulation & mesure
c(t)
Rponse un chelon de consigne
y(t)
P
26
Si le coefficient proportionnel Kp (paramtre rglable) est suffisamment faible, le sys-
tme est stable, mais la temprature ne peut alors pas atteindre la consigne (sinon, on au-
rait V(t)=0 !): On a alors un cart, dit cart de statisme:
T=e(t)=V(t)/Kp
Si Kp est grand et si il existe un retard, le systme se met osciller d'o un choix drama-
tique entre la stabilit et la prcision...
Remarque : Ici, laction est borne (entre 0 et +10V), il sagit dune non-linarit par rap-
port la thorie du PID. Dans le cas plus gnral, Kp grand peut entraner une divergence
dramatique.
On montre que celle-ci a lieu si
R R
S
t t
KG
57 . 1
2
Pour avoir en mme temps une bonne prcision et une bonne stabilit, on doit ajouter:
Laction Intgrale ("I")
Pour compenser petit petit l'cart de statisme, on ajoute l'action un terme d'intgration
de l'cart consigne - signal .
On a alors:
(
+ =
dt t e
t
t e Kp t V
i
) (
1
) ( ) (
L'action I est caractrise par le paramtre rglable t
i
, homogne un temps, est sera d'au-
tant plus forte que t
i
sera faible.
c(t)
Rponse un chelon de consigne
y(t)
P
PI
t
27
Pour corriger les variations brusques de temprature (ou de consigne), on peut ajouter en-
core:
Laction Drive ("D")
On ajoute l'action un terme de drive de l'cart consigne - signal . L'action D est caract-
rise par le paramtre rglable t
d
, homogne un temps, est sera d'autant plus forte que t
d
sera
fort.
On a alors lalgorithme PID complet :
|
|
\
|
+ + =
dt
t e d
t dt t e
t
t e Kp t V
d
i
) ( (
* ) ( *
1
) ( * ) (
Soit, en termes discrets :
( )
|
|
\
|
+
+ =
=
k
j
j
i
k k
d
k k E
t
t
E E
t
t
E
Kp
V
0
1
, o t est la priode de rgulation.
(Par convention, le terme proportionnel K
p
agit sur les 2 autres termes).
Il existe de nombreuses recettes permettant de dterminer les bonnes valeurs des para-
mtres PID, les principales tant :
Daprs les paramtres didentification du processus: (ncessit de faire une identifica-
tion, pas toujours vidente) qui sont, pour un ordre 1 avec retard :
- La constante de temps (ou inertie ),
- Le retard pur t
r
,
- Le gain statique Gs(rapport temprature / action en rgime permanent ).
On peut alors estimer les valeurs permettant de rguler en respectant les critres dits de
Ziegler & Nichols : Systme oscillant amorti dun facteur 4 entre les 2 premires oscil-
lations
tr G
Kp
s
2 . 1
= t
i
=2t
r
t
d
=0.4 t
r
On pourra aussi essayer les critres dits CHR0 :
tr G
Kp
s
6 . 0
= t
i
= t
d
=0.5 t
r
28
Daprs la mthode dites des oscillations entretenues (moins efficace que la prc-
dente mais souvent plus facile mettre en uvre, car ne ncessite pas didentification):
Rgler le PID en proportionnel pur, puis augmenter progressivement Kp jusqu ce que le
signal commence osciller, on notera alors Kp
l
la valeur de Kp et t
0
la priode des oscilla-
tions : Les paramtres selon les critres de Ziegler et Nichols seront alors :
Kp=0.62 Kp
l
t
i
=0.5*t
0
t
d
=t
i
/5
Ces 2 mthodes, plus ou moins empiriques, (qui donnent dailleurs parfois des rsultats
diffrents) sont trs approximatives et doivent tre affines au cas par cas.
Raliser un VI de rgulation PID. On pourra rgler, partir de la face avant :
la consigne, les 3 paramtres de rgulation PID ainsi que la priode de rgu-
lation. Pendant le fonctionnement, on rglera les paramtres de rgulation
partir dune des 2 mthodes, puis on affinera empiriquement afin davoir
une rgulation :
1 : prcise
2 : rapide (consigne atteinte rapidement)
3 : rpondant efficacement aux changements de consignes ou aux pertur-
bations (on pourra utiliser le ventilateur).
4.e Mesure de la temprature de llment chauffant: ( faire si la
partie PID est termine)
LM35
+12
capteur
soudure froide
Voie 1
Voie 0
thermocouple
+
-
sortie analogique 0
+12
1 ohm
Voie 2
lment chauffant
en platine
+12
Une rsistance de 1 ohm est insre dans le circuit de chauffage, la mesure de la tension
ces bornes (connectes la voie 2 de la carte dacquisition) permet alors de mesurer le courant
de chauffage. Il est alors possible de calculer en temps rel :
29
- la tension de chauffage et le courant de chauffage, et donc,
- la puissance relle de chauffage et la rsistance de chauffage
- Cette dernire tant en platine pur, il est possible de connatre la temp-
rature de llment chauffant (le coefficient du platine est : 0.00385 C
-1
)
Afficher ces informations en temps rel
IMPORTANT : Penser, avant denregistrer votre travail, faire Excution /
Prendre les valeurs actuelles par dfaut , faute de quoi vos valeurs de contrles seraient
perdues lors de la prochaine rouverture du VI.
30
31
5. TP N2: DETECTION SYNCHRONE
5.a But:
A : Utilisation d'une carte d'acquisition pour lacquisition dun signal (oscilloscope) +
analyse frquentielle.
B : Application la dtection et la mesure d'un signal priodique de rfrence connue, ce
signal pouvant tre noy dans un bruit (= signaux de frquences diffrentes) qui lui est sup-
rieur de plusieurs ordres de grandeur. Cette dtection peut se faire de diffrentes faons.
Ici, il s'agira de dtecter, l'aide d'une photodiode, l'clairage d'une diode lectrolumines-
cente alimente par un courant sinusodal.
On utilise une carte dacquisition National Instruments 6221 pouvant effectuer jusqu'
200000 mesures par seconde.
5.b Prambule : Analyse frquentielle & signaux priodiques
(Ces notions, dj connues par certains, seront prcises lors du cours dUP1)
Pour la suite, nous nommerons signal toute srie F
i
, ou tableau unidimensionnel, de
mesures acquises avec un intervalle de mesure T dont linverse est la frquence dacquisition
f
s
(ou dchantillonnage).
Linformation contenue dans un signal F peut tre visualise de 2 faons diff-
rentes :
Dans le domaine temporel : mthode classique, fonction F
k
=F(kT)
Dans le domaine frquentiel : permet de reprsenter la rpartition de lintensit (ou
de la puissance) du signal dans les diffrentes frquences du spectre :
1
2
3
32
1 : composante continue (= valeur moyenne)
2 : Signal triangulaire (1 fondamental + des harmoniques)
3 : bruit Gaussien haute frquence
Le passage du domaine temporel vers le frquentiel se fait par la transforme de Fourier.
Comme le signal est chantillonn (on ne connat sa valeur que f
s
fois par seconde), on utilise
la transforme de Fourier discrte.
La transforme de Fourier discrte ou DFT permet de dcomposer une fonction quel-
conque, priodique ou non, en sinus et cosinus, et donc de connatre ses composantes de fr-
quence:
Soit le signal chantillonn F
k
=F(kT) o T est la priode d'chantillonnage (et f
s
=1/T est la
frquence dchantillonnage). N est le nombre de points, trouver les a
j
et b
j
tels que:
+ =
1
0
) / 2 sin( ) / 2 cos(
N
j j k
N jk b N jk a F
Solution: a
j
=2/N*Rel(f
j
) b
j
=-2/N*Imaginaire(f
j
) avec
=
1
0
/ 2
) (
N
k
N ijnk
j
e
f
kT F
, j
ime
composant de la DFT
Proprits:
- f
0
= composante continue du signal
- f
j
= composante correspondant une frquence de s
f
N
j
NT
j
=
-
0) (j , =
j j N
f f
et donc fj n'est utile que si j N / 2 qui correspond la fr-
quence dite de Nyquist (moiti de la frquence d'chantillonnage), d'o le thorme de Shan-
non, thorme fondamental de lchantillonnage, (cf p 18) :
Un signal de frquence f chantillonn avec une frquence dchantillonnage f
s
ne peut tre
reconstitu (= linformation du signal a t correctement acquise) que si :
f
s
>2f
Si la fonction F est priodique de frquence s, alors la TFD se limite une srie de pics
aux frquences multiples entiers de s (plus ventuellement f
0
). Le pic de frquence s est ap-
pel fondamental, les pics de frquence j.s (j entier >1) les harmoniques.
Pour un signal non sinusodal, le thorme de Shannon sapplique toutes les com-
posantes frquentielles du signal. (Comme le nombre dharmoniques est gnrale-
33
ment infini, on ne garde que celles ncessaires pour reconstituer le signal avec une
certaine prcision.
Par consquent, il est normalement ncessaire, avant dchantillonner un signal,
de sassurer que toutes les composantes de frquence suprieure f
s
/2 ont t
limines (par filtrage dit antialiasing ).
Le nombre de multiplications ncessaires pour effectuer une DFT, proportionnel N
2
, de-
vient vite colossal. Heureusement, il existe un algorithme dichotomique ramenant ce nombre
NLog
2
(N), c'est la "Fast Fourier Transform" ou FFT. Seule contrainte de la FFT, N doit tre
une puissance de 2. Labview utilise lun ou lautre, suivant le nombre de points.
On utilise en fait plus souvent le spectre en puissance du signal:
N
f
j N
f
j
Pj
2
2 2
|
\
|
+
= ,
N
f
P
2
2
0
0
|
\
|
=
qui, en vertu du thorme de Shannon, n'a de signification que jusqu' j=N/2.
5.c Quelques outils disponibles :
Outils dacquisition avec carte National Instruments : La carte dacquisition est du type
NI-PCI 6221 (caractristiques en annexe 2) qui utilise des outils situs dans le menu :
Mesure NI / DaqMX
Pour toute opration dacquisition, on utilisera plutt loutil de lassistant DAQ dispo-
nible dans le menu de fonctions (Mesures NI / DAQMX / Assistant
DAQ ). Il suffit alors de choisir Entre analogique , puis Tension , puis de slec-
tionner la ou les voie(s) utilises, dans le bon ordre
(slection multiple avec touche Ctrl). Modifier
alors ventuellement la ou les gammes dentres, le
nombre de points ( chantillons lire et la fr-
quence dchantillonnage (maxi 250000 Hz) .
Le signal dynamique obtenu peut alors tre
envoy directement sur un graphe. Pour en extraire
un ou des signaux ( waveform ), voire directe-
ment des tableaux de valeurs, on utilisera loutil de
conversion (Express / Manipulation /
DDT-> du menu fonctions que lon confi-
34
gurera pour obtenir waveform, tableau de waveform ou tableau 1d ou 2d de scalaires, en choi-
sissant ventuellement la voie (voir ci-contre).
5.d VIs raliser :
VI 1: Acquisition et analyse dun signal:
Lentre analogique 7 de la carte (Priphrique 1) est connecte un gnrateur de si-
gnaux, dans un premier temps, on nexploitera que cette voie :
Transformer le PC en oscilloscope une voie qui affichera aussi le spectre de
puissance gradu en Hz. On pourra afficher enfin : la frquence fondamentale
du signal, sa valeur moyenne, sa valeur efficace et tout autre information utile
sur le signal.
On mettra en vidence diffrentes formes du thorme de Shannon :
- Avec un signal sinus
- Avec un signal plus complexe : le signal carr, que se passe-t-il si
le fondamental respecte le thorme de Shannon et pas les
harmoniques ?
Les principaux outils de traitement et de mesure sont dans :
Analyse / mesures sur Waveform
Analyse / Traitement du Signal
Analyse / Mathmatiques /
Ne pas hsiter demander
VI 2: Dtection de lallumage dune LED :
Problme :
Le signal alimentant la source lumineuse (LED : diode electro-luminescente) est celui uti-
lis prcdemment (voie 0) .
On utilisera comme signal de rfrence le signal prcdent (issu du gnrateur BF), mais
attnu dun facteur 100 (pont diviseur 10 kohms / 100 ohms dj install) afin dviter les
problmes de diaphonie. Ce signal est prsent sur la voie 0.
La LED ne laisse passer le courant que dans un sens : Rgler lamplitude et loffset du g-
nrateur afin que le signal soit compris entre 1 et 8V.
35
Le courant de la photodiode est transform en courant et amplifi (le gain est ngatif).
Llectronique effectue aussi un filtrage analogique passe haut, sa frquence de coupure
est de lordre de 2 kHz. Un filtrage passe bas antirepliement coupe au del de environ 15
kHz.
Si vous avez le temps la fin de la premire sance, essayez de raliser la
dtection de la LED (indicateur boolen indiquant si la LED est visible ou non)
par filtrage numrique.
Dtection synchrone :
La dtection synchrone, ou mthode du produit scalaire, est une mthode utilise depuis long-
temps car elle peut tre traite de faon entirement analogique (cest dire alors sans calcul).
Nous lutiliserons de faon numrique:
Principe de la dtection synchrone :
Soient S le signal de la photodiode (voie 1) et R le signal de rfrence en (voie 0) : Si
tous deux sont de valeur moyenne nulle (pas de composante continue). On a alors:
R=Asin(t)
S=Bsin(t+)+f(t) (B = grandeur mesurer)
f(t) est le bruit (lectronique ou optique), on peut le dcomposer en son spectre de fr-
quence (TFD):
f t f t
i
i
i
( ) *sin( ) =
Effectuons le produit : R S AB t t A f t t
i i
i
* sin *sin( ) sin sin = + +
Si lon moyenne ce signal sur un nombre suffisamment grand de points, on obtient :
1/100
36
M R Sdt =
*
0
Or on peut montrer facilement que :
sin( ) sin( ) cos
1 2
0
1
2
t t dt + =
si
1 2
=
= 0 sinon
Donc M # ABcos si f(t) a peu dharmoniques de pulsation .
Il sagit ici dun produit scalaire entre les 2 signaux, on obtient alors la composante X de
S en phase avec R
La valeur moyenne de RS est donc proportionnelle l'intensit du signal dtecter si les
2 signaux ne sont pas en quadrature et si le dphasage est constant. Nous lappellerons si-
gnal de dtection .
En supposant dans un premier temps que le dphasage est constant et diff-
rent de /2, raliser le VI permettant de montrer lvolution du signal de dtec-
tion en fonction du temps.
On vrifiera limmunit du signal aux lumires parasites, en particulier les 50
Hz redresss des nons.
Dans un deuxime temps, on imaginera un dispositif permettant de mesurer
aussi le dphasage. Indication : ce type de dispositif sappelle alors double
dtection synchrone , il consiste effectuer, outre la dtermination de la
composante X, le calcul de la composante Y grce un produit scalaire
avec un signal calcul dphas de /2 avec R et de mme module.
Afin de tester ce systme, on pourra modifier le dphasage en se rapprochant
de la frquence de coupure du filtre passe-bas de llectronique (15 kHz),
pourquoi ?
A partir dune estimation de la moyenne et de lcart type du signal de dtec-
tion mesur lorsque la LED est invisible, on dterminera un seuil de dtection
au del duquel un indicateur indiquera la visibilit de la LED avec un taux
derreur infrieur 0.5%. Ce seuil sera dtermin dans un premier temps de
faon intuitive, puis, si il reste du temps, de faon plus rigoureuse en utilisant
la thorie ci aprs.
Notion de seuil de dtection
37
Supposons que lon veuille dterminer si un vnement mesurable (mesure X) est
prsent (X >0) ou absent (X =0).
On dtermine alors un seuil de dcision S (si X<S, vnement absent, si X>S,
vnement prsent)
On montre alors que :
la plus petite mesure non nulle dtectable, et pour laquelle le risque derreur est
le mme pour les 2 types derreurs possibles (erreur A = dtection alors que
lvnement est absent ; erreur B = non dtection alors que lvnement est prsent)
est 2 fois le seuil de dcision, on lappelle seuil de dtection.
Si X est de valeur moyenne nulle et de distribution normale, on peut montrer que le seuil
de dtection S est environ 3 pour un taux derreur de 5% et 5 pour un taux derreur de
0.5%,
o est lcart type de la mesure proche de zro.
IMPORTANT : Penser, avant denregistrer votre travail, faire Excution /
Prendre les valeurs actuelles par dfaut , faute de quoi vos valeurs de contrles seraient
perdues lors de la prochaine rouverture du VI.
38
39
6. TP N3 : Liaisons numriques / ETALONNAGE
6.a Introduction :
Ce TP a 2 buts :
1 :Apprendre dialoguer, grce Labview, avec un instrument numrique possdant une
liaison numrique,
2 : Crer, talonner et valuer un instrument de mesure, ici une balance dont le capteur est
une jauge de contrainte.
6.b Prambule : Incertitude de mesure, rgression linaire
Ces notions seront vues (ou revues) plus en dtail pendant les activits dUP3.
(ou sur http://www.emse.fr/~pbreuil/capmes/index.htm)
Soit une variable x dont la valeur relle (mais pas forcment connue) est x
R
,
On procde n mesures, ou valuations, de x appeles x
i
(1in).
Ces mesures sont gnralement diffrentes de x
R
, cette diffrence est la variable erreur ,
dont on distingue 2 composantes:
B A
+ =
L'erreur systmatique:
B
La valeur moyenne de l'erreur systmatique est non nulle: Le mesurage donne une va-
leur qui s'carte systmatiquement de la valeur vraie.
L'erreur systmatique intervient dans la notion de justesse : une mthode d'analyse est
juste quand on a pu liminer l'erreur systmatique. Cette limination se fait le plus souvent
l'aide d'talons qui ne doivent pas amener eux-mmes une erreur .
D'une faon gnrale, on peut considrer que l'erreur systmatique n'est finalement jamais
value car elle est:
soit inconnue,
soit connue et alors corrige (par exemple par comparaison avec un talon), auquel cas on
l'annule.
L'erreur accidentelle ou alatoire (
A
)
C'est une variable alatoire. Lorsqu'on rpte plusieurs fois le mesurage d'une grandeur
physique ou chimique constante, on obtient gnralement diffrentes valeurs plus ou moins
disperses (et qui sont souvent distribues suivant une loi normale, voir plus loin) .
40
Par dfinition, la valeur moyenne de lerreur accidentelle, ou alatoire, est nulle.
Dans la plupart des cas, les erreurs accidentelles ont une distribution normale. Cette hy-
pothse de distribution normale, valable pour 99% des cas, provient du fait que plusieurs
sources indpendantes contribuent gnralement cette erreur. Or le Thorme Central Limite
nous dit qu'une combinaison linaire d'un nombre suffisamment grand de variables indpen-
dantes de distributions quelconques tend vers une distribution normale.
Caractrisation de la mesure et de son erreur:
On peut caractriser la mesure par:
une moyenne estime de la mesure qui est la moyenne arithmtique des n mesurages x
1
,
x
2
x
i
x
n
faits pour caractriser une grandeur :
x
x
n
i
n
=
1
Si l'erreur systmatique est nulle (ce que l'on suppose pour la suite), alors
R
x x
quand n (x
R
= valeur relle, priori inconnue).
un cart-type dfini comme tant la racine carre de la moyenne du carr de l'cart entre
la mesure et la valeur relle x
R
:
( ) ( )
= =
n
R i R i
x x
n
x x
1
2 2
) (
1
(fonction Excel ECARTYPEP)
Mais gnralement, x
R
est inconnu, on en a juste une estimation par la moyenne x . On
peut alors calculer une estimation de l'cart type note s:
=
n
i
x x
n
s
1
2
) (
1
1
. (fonction Excel ECARTYPE)
De mme, l'cart type estim tend vers l'cart type rel quand n .
la variance est gale au carr de l'cart-type :
2
= V
Si la distribution des erreurs est normale (ou gaussienne) (c'est gnralement le cas), on
peut alors dterminer, la probabilit p pour qu'une mesure individuelle soit hors de l'intervalle
[ ] ts x ts x + ,
t.s est appel incertitude largie et t est le coefficient de Student .
41
Ainsi, pour n suffisamment grand (n>20), t vaut environ 2 et donc environ 95% des me-
sures sont dans l'intervalle [ ] s x s x 2 , 2 + , ( 99.7% dans l'intervalle [ ] s x s x 3 , 3 + ).
Si n est plus faible, alors on on doit tenir compte dune augmentation de t, donn par des
tables (pour une probabilit de 95%, t vaut 2.26 pour n=10, et 2.78 pour n=5.
Rappelons que si lon prend maintenant pour mesure la moyenne de n mesures indivi-
duelles dont les erreurs sont alatoires et indpendantes, alors la valeur de lcart type de-
vient :
n
x
x
= (cf thorme de la moyenne, p 19)
Le rsultat dune mesure doit comporter 4 lments :
Ex : C
NO
= 125.3 ppb 1.7 ppb (k=2)
1 2 3 4
1 : Valeur numrique avec un nombre correct de dcimales
2 : Unit
3 : Incertitude largie = t. (= intervalle de confiance x 2)
4 : Le coefficient dlargissement t utilis (gnralement not k : ex k=2)
Si la mesure est non nulle, on utilise souvent lincertitude (largie) relative ( la me-
sure), calcule partir de lcart type relatif :
x
r
= , souvent exprime en pourcentage de
la mesure.
Evaluation de lincertitude :
On distingue 2 types de mthode :
Evaluation de type A : par analyse statistique de sries de mesures, laide des formules
du paragraphe prcdent
Evaluation de type B : Par tout autre moyen ( !) : gnralement, on value leffet sur
lincertitude finale des diffrentes sources dincertitude, elles mme values :
Par une mthode de type A,
Par des donnes constructeur, dtalonnage etc
Remarque: L'incertitude donne par le constructeur peut tre en partie constante pour un
appareil donn. Mais on ne connat ni sa valeur, ni mme son signe, elle sera donc consid-
re comme une erreur alatoire.
42
On utilise alors les lois de propagation des cart-type (ou des incertitudes, au facteur
dlargissement prs) :
Si la mesure finale, y, est fonction de variables x
i
, indpendantes dont les (x
i
) sont con-
nus:
y=f(x
1
x
n
), alors lcart type de y scrit :
) ( ) (
1
2
2
2
i
n
i
x
x
f
y
|
|
\
|
=
(Il sagit en fait du thorme des accroissements finis appliqu la variance)
Exemples : (variables indpendantes)
1 : Combinaison linaire
=
i
i i
x a y , alors
=
i
i i
x s a y s
2 2
)) ( ( ) (
Ex: somme ou diffrence: c b a y + = , alors ) ( ) ( ) ( ) (
2 2 2
c s b s a s y s + + =
2 : Produits et puissances :
=
i
i
i
x A y
Il est dans ce cas plus commode de considrer lcart type relatif
y
y s ) (
:
On a alors :
|
|
\
|
=
|
|
\
|
i i
i
i
x
x s
y
y s
2 2
) ( ) (
Ex :
c
b a
K y
2
. = o K=constante, alors
2 2 2
) ( ) ( ) ( 2 ) (
|
\
|
+ |
\
|
+ |
\
|
=
c
c s
b
b s
a
a s
y
y s
Ou encore:
2
2
2
2 2
) ( ) ( ) (
2
) (
|
|
\
|
+
|
\
|
+
|
\
|
= c s
c
b a
b s
c
a
a s
c
ab
K y s
Rappelons, pour mmoire (cf p 18), que lcart-type de lerreur due la discrtisation
scrit :
29 . 0
3 2
= =
d
, o est la rsolution.
L'talonnage par rgression linaire
L'talonnage (calibration en anglais) d'un instrument de mesure ou d'un capteur, consiste
modliser le signal de sortie du capteur (appel Xvariable, gnralement un signal lec-
trique) en fonction de la variable mesure (appele Yvariable, variable physico-chimique).
43
Pendant l'talonnage, les Yvariables, considres comme talons, sont connues ou values,
ainsi que les Xvariables associes.
Le modle est alors une fonction F: ) (
X F Y =
L'utilisation normal du modle, ou prdiction, permet d'valuer les Y
l'aide des seuls X et
du modle F.
Si lon fait lhypothse dune loi linaire reliant les X et les Yvariables, alors le modle
peut tre dtermin par une rgression linaire :
Cette mthode permet de dterminer
lquation de la droite (pente a + ordonne
lorigine b) minimisant la somme des carrs
des carts entre mesure et valeurs calcu-
les b ax y + = :
( )
2
= y y S minimale
En appliquant cette mthode, on
suppose implicitement que seules les Yvariables ont des erreurs alatoires.
Les calculs de rgression linaire seront faits laide dExcel qui offre 2 possibilits :
courbe de tendance, partir dun clic droit sur un graphe nuage de points
fonction DROITEREG, plus complexe, mais permettant, entre autres, de calculer les
cart-type de la pente et de lordonne lorigine (cf annexe en fin de chapitre)
6.c Utilisation dune liaison srie RS232 :
Les liaisons numriques permettent certains instruments numriques (multimtre de
table, data logger, rgulateur etc...) de dialoguer avec un Micro-ordinateur ou avec dautres
instruments.
Gnralits :
microcontroleur Interface extrieur PC
Liaison
numrique
Instrument
44
Il existe, en instrumentation, de nombreuses formes physiques de liaisons numriques
(RS232, RS485, GPIB, ethernet, CAN bus etc) et pour chaque forme de nombreux proto-
coles, souvent propres chaque constructeur.
Nous allons tudier la forme de dialogue la plus simple mettre en uvre qui le dialogue
Matre esclave . Dans cette configuration, linstrument, lesclave, attend des ordres mis
par le matre (ici un PC) pour y rpondre.
Ces dialogues se font souvent en ASCII, cest dire laide de chanes de caractres. Du
point de vue informatique, une chane de n caractres est un tableau de n octets (entier entre 0
et 255), la valeur de chaque octet correspondant au code ASCII dun caractre.
Les codes des caractres dits imprimables (lettres, chiffres et ponctuation) sont compris
entre 32 et 127. Les codes 0 31 sont des caractres de contrle (ex : 13=CR=Carriage Re-
turn, 27=Esc=Escape...).
La liaison numrique utilise pour ce TP est une liaison srie RS232 qui a lavantage
dtre prsente sur tous les PC.
Cest une liaison srie (1 seul fil pour les donnes), asynchrone (pas de synchronisation
avec un signal dhorloge), full duplex (un fil par sens). Elle est peu performante en vitesse
mais facile mettre en uvre et prsente sur tous les PC.
Transmission dun octet: (pour info)
Outils Labview utilisables : dans E/S dinstruments / Srie
Initialisation : (une seule fois dans le programme)
parity bit
start bit
Stop bit
0 logique
1 logique
+1
-
Emission de 1010011 (ASCII S), en 7 bits et parit
45
Ecriture (PC priphrique) :
Lecture (priphrique PC) :
Ici, lecture sarrte ds que le nombre doctets est atteint ou que le caractre de termi-
naison est rencontr (si ce mode est activ)
Lenchanement des nom de ressource VISA ou des entres / sorties derreur permet
de grer la chronologie sans utiliser de structure squence :
Protocole :
Linstrument tudi est un module dacquisition de type 6B11 dAnalog Device. Ces
modules permettent de faire lacquisition dune tension avec une bonne prcision. Plusieurs
gamme de mesure sont disponibles et programmables (de +/- 15 mV +/- 5 V).
La dure dune conversion analogique digitale est 60 ms.
Le module est configur pour une vitesse de transmission de 19200 bauds ( bits / s)
(8 bits de donnes, 1 bit stop, pas de parit, pas de protocole), une adresse 00 et pas de Check-
sum. La gamme de mesure est rgle sur +/- 15 mV . Ne pas tenter de modifier ces para-
mtres.
Protocole : extrait de la notice Analog Device relative la lecture dune mesure
Commande : #AA avec :
Exemple non fonctionnel
46
# caractre # = code de la commande Emission de la mesure la plus rcente ,
AA adresse du module en hexadcimal sur 2 caractres (00 si adresse 0),
caractre de contrle carriage return (code ASCII 13) prdfini dans Labview :
)
Rponse : >(data) avec :
> caractre de dbut de message,
(data) chane de caractres reprsentant le rponse sous forme dcimale,
carriage return (fin de message)
Exemple : Commande #00 rponse : >+4.7653 (4.7653 mV)
6.d Premire ralisation: milliVoltmtre
1 : Raliser un instrument (mVmtre numrique) permettant de lire et
dafficher graphiquement la tension prsente lentre.
On grera lerreur de communication la plus courante qui est le time out (ab-
sence de rponse au bout dun certain temps).
Quel est, en V, la rsolution du convertisseur analogique-numrique ?
Etudier linfluence du nombre de mesures moyennes sur lcart type de la
mesure (cf thorme de la moyenne, p 19).
Vrifier notamment le type de la loi ) ( ) ( n f x = , correspond-il la thorie ?
Quelle peut tre linfluence dune ventuelle temporisation entre 2 mesures ?
On choisira pour la suite un nombre de mesures correspondant un
temps de mesure total de lordre de plusieurs secondes : ce temps doit,
tout en restant dans des limites raisonnables, permettre un cart-type
maxi de 0.5 s, voire moins.
6.e Deuxime ralisation : balance numrique
Lentre du module est en fait relie un systme de mesure de masse :
47
R
R
Rj
6B11
module d'acq.
E=2.5 V
jauge de contrainte
pont
R Plus
Moins
On suppose ici que vous avez dtermin une mthode de mesure
(moyenne sur n mesure) qui deviendra pour la suite LA mesure.
Afin de raliser une balance numrique indiquant la masse mesure en kg,
procder un talonnage laide dun certain nombre de mesures (20 40)
laide de masses calibres utilises dans un ordre alatoire (il nest pas im-
possible quil y ait une lgre hystrsis mcanique), on utilisera un mini-
mum de 5 ou 6 valeurs de masse diffrentes. Ce sont les 20 40 mesures qui
seront utilises individuellement pour la rgression linaire.
Attention, les performances finales de linstrument dpendront directement de
la qualit de cet talonnage :
Dans un premier temps, la gamme sera 0 2 kg et on supposera la linarit
du dispositif.
Pour faire les calculs statistiques (cart types, rgressions linaires ou non li-
naires), on utilisera Excel.
Aprs avoir ralis la rgression linaire, il est intressant de tracer les rsi-
dus en fonction de la masse :
il sagit des carts entre la mesure relle et le modle, cest donc linformation qui na pas
t modlise et qui, si le modle est correct, doit tre alatoire. Ce graphe permet donc :
de dtecter les valeurs aberrantes ( outliers )
de dtecter les problmes de non linarit ( sous-modlisation )
dvaluer la composante erreur lie la mesure (voir plus loin) gale lcart-
type des rsidus
R
.
A laide du modle, raliser un affichage en masse, ajouter enfin un bouton de
tarage permettant tout moment de ramener la mesure 0 (lestimation de
lordonne lorigine b devient alors inutile). Voir figure ci-dessous.
48
a
-
offset
tarage
V
M
0
M
Il existe 2 mthodes pour calculer lcart-type de la mesure (et donc lincertitude 95%
qui est environ 2 fois lcart-type) :
Mthode exprimentale :
Il est ncessaire de faire un certain nombres de mesures dans les conditions exactes
dutilisation et de calculer lcart-type. Attention, celui-ci nest pas forcment constant sur la
gamme, et lopration doit donc tre renouvele en plusieurs points de la gamme.
Par calcul :
Il sagit de rpercuter toutes les sources dincertitude sur le rsultat final. Elles sont au
nombre de 2 : lincertitude sur la mesure de tension (erreur lie la mesure ) et
lincertitude sur le coefficient a calcul lors de ltalonnage (erreur de modlisation ).
Montrer ( laide de : ( )
|
|
\
|
=
n
i
i
n
x
x
f
x x f
1
2
2
2
1
) ( ) ,..., ( ) que lincertitude peut scrire :
( )
2
0
2 2 2
2 V V a
b a V M
+ =
avec :
V
b
=mesure brute de tension, avant correction doffset,
V
0
=mesure tension doffset, mesure lors dun offset,
a = pente dtermine par rgression linaire,
V
= cart type estim de la mesure de tension, suppos constant sur toute la gamme de
tension, dtermin soit : (on testera si possible les 2 mthodes)
laide de plusieurs mesurages dune mme masse dans les conditions
normales dutilisation,
Erreur lie la mesure
Erreur de modlisation
49
laide de lcart-type de prdiction S
Y/X
(cart-type des carts entre la droite
de rgression et les points dtalonnage, calcul par la fonction Excel droite-
reg) : S
Y/X
=a
V
.
a
= cart type estim de la pente, donn par la fonction Excel DROITEREG (voir an-
nexe en fin de chapitre).
On observe que
0
M
dpend de V et donc de la masse, cela confirme que lincertitude sur
la mesure de la masse ne sera pas constante sur la gamme, mme si lincertitude sur la mesure
de tension lest.
Indiquer les valeurs dE.T. des 2 composantes derreur, lune delle est-elle ngli-
geable ?
Indiquer lincertitude 95% sur la mesure de la masse, avec les conditions
de fonctionnement :
- En temps rel dans le VI,
- Quelles spcifications indiqueriez-vous dans la notice ?
Ce rsultat du TP est particulirement important. Il sera par ailleurs intressant de faire
un bilan statistique des valeurs trouves par les diffrents binmes.
Complter ltalonnage prcdent de quelques points pour tendre la gamme 0 4
kg. Le modle prcdent est-il toujours valable ? Faire des suggestions pour un mo-
dle plus performant.
6.f Annexe : fonction Excel DROITEREG
Cette fonction calcule les statistiques pour une droite par la mthode des moindres carrs, afin
de calculer une droite qui s'ajuste au plus prs vos donnes, puis renvoie une matrice dcri-
vant cette droite.
L'quation de la droite est la suivante :
y = mx + b
(ou, plus gnralement, y = m1x1 + m2x2 + ... + b (s'il existe plusieurs plages de valeurs x))
Syntaxe
DROITEREG(y_connus;x_connus;constante;statistiques)
y_connus est la srie des valeurs y dj connues par la relation y = m x + b.
50
x_connus est une srie de valeurs x. La matrice dfinie par l'argument x_connus peut
contenir une ou plusieurs sries de variables
constante est une valeur logique qui indique si la constante b doit tre gale 0.
o Si l'argument constante est VRAI ou omis, la constante b est calcule norma-
lement.
o Si l'argument constante est FAUX, b est gal 0 et les valeurs m sont ajustes
de sorte que y = mx.
statistiques reprsente une valeur logique indiquant si des statistiques de rgression
supplmentaires doivent tre renvoyes.
o Si l'argument statistiques est VRAI, la fonction DROITEREG renvoie des sta-
tistiques de rgression supplmentaires et la matrice renvoye devient :
{mn.mn-1.....m1.b; sen.sen-1.....se1.seb; r2.sey; F.df; ssreg.ssresid}.
o Si l'argument statistiques est FAUX ou omis, la fonction DROITEREG ren-
voie uniquement les coefficients m et la constante b.
Le rsultat de DROITEREG est une matrice, il est donc indispensable:
avant de taper =DROITEREG..., d'avoir slectionn une plage de cellule au moins
aussi grande que cette matrice, soit, pour uns seule variable X et si l'argument sta-
tistique est VRAI, une plage de 2 colonnes par 5 lignes.
Lorsque la formule est saisie, de la valider l'aide de la combinaison de touches
"Shift"+"Ctrl"+"Entre" (au lieu de "Entre").
Les statistiques de rgression supplmentaires sont les suivantes (cas y=mx+b):
51
Annexe 1 : caractristiques de la carte dacquisition 6024e
52
53
Annexe 2 : caractristiques de la carte dacquisition NI-PCI6221
54
Das könnte Ihnen auch gefallen
- Topo Sur Historisation de VariablesDokument36 SeitenTopo Sur Historisation de VariablesChafik BouguezourNoch keine Bewertungen
- Catalogue Compact NSXDokument298 SeitenCatalogue Compact NSXbenNoch keine Bewertungen
- Entretien Des Appareils ÉlectriquesDokument82 SeitenEntretien Des Appareils ÉlectriquesMohamed SomaiNoch keine Bewertungen
- Document2 Autots22012-2013 PDFDokument61 SeitenDocument2 Autots22012-2013 PDFKhaoulaMaatougNoch keine Bewertungen
- PresentationDokument17 SeitenPresentationtechn2 lifeNoch keine Bewertungen
- Brochure Système Numérique de Contrôle Commande Deltav FR 57132Dokument40 SeitenBrochure Système Numérique de Contrôle Commande Deltav FR 57132Eric LefrançaisNoch keine Bewertungen
- Chapitre 9 - Liaison Serie RS232Dokument77 SeitenChapitre 9 - Liaison Serie RS232the.diable.tristreNoch keine Bewertungen
- 06 PDFDokument10 Seiten06 PDFredwaneNoch keine Bewertungen
- Régulation Industrielle - EMIDokument129 SeitenRégulation Industrielle - EMIAssia Benabid100% (1)
- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Automate Programmable S7-200 Manuel Système SimaticDokument560 Seiten1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Automate Programmable S7-200 Manuel Système SimaticTonprince Knight Ad100% (1)
- Mémoire Finale115Dokument123 SeitenMémoire Finale115أم رضاNoch keine Bewertungen
- Chapitre 4 La Communication Et La Synchronisation Interprocessus PDFDokument11 SeitenChapitre 4 La Communication Et La Synchronisation Interprocessus PDFaminou mohamadouNoch keine Bewertungen
- Instr Indus Slides2020 2021Dokument118 SeitenInstr Indus Slides2020 2021Ahmed IdouNoch keine Bewertungen
- TP1 SujetDokument5 SeitenTP1 SujetHichem HamdiNoch keine Bewertungen
- M204 Controleur Chapitre2 ModifiéDokument32 SeitenM204 Controleur Chapitre2 Modifiéahmad ahmadNoch keine Bewertungen
- La Reconnaissance Vocale Dans Son ApplicationDokument14 SeitenLa Reconnaissance Vocale Dans Son ApplicationAyoubENSATNoch keine Bewertungen
- 675-Estimation Du Débit en Fonction de La Position de La VanneDokument3 Seiten675-Estimation Du Débit en Fonction de La Position de La Vannerequin2101Noch keine Bewertungen
- Fascicule TP - Systeme Embarqués - 2012 - La EEA A3Dokument31 SeitenFascicule TP - Systeme Embarqués - 2012 - La EEA A3Habib HAMDINoch keine Bewertungen
- Dossier-Va85-012017 Validation Des AcquisDokument8 SeitenDossier-Va85-012017 Validation Des AcquisOussamaAmraniNoch keine Bewertungen
- Chapitre 4 Etude Et Programmation de lAPI S7 200Dokument27 SeitenChapitre 4 Etude Et Programmation de lAPI S7 200Cherdouh RabahNoch keine Bewertungen
- Jauge de ContraintesDokument27 SeitenJauge de ContraintesAchraf El aouame100% (1)
- ELN InstrumentationDokument55 SeitenELN Instrumentationdjimy_dzNoch keine Bewertungen
- TP FlowcodeDokument11 SeitenTP Flowcodekurts010Noch keine Bewertungen
- Boucle Courant 4 20maDokument9 SeitenBoucle Courant 4 20maAminoModric100% (1)
- Chapitre 3Dokument163 SeitenChapitre 3nourNoch keine Bewertungen
- TS1131Dokument1 SeiteTS1131amidi5555913Noch keine Bewertungen
- Syllabus Capt Et Instrumentation Industrielle PDFDokument4 SeitenSyllabus Capt Et Instrumentation Industrielle PDFNguena EstherNoch keine Bewertungen
- Introduction Au SystemCDokument42 SeitenIntroduction Au SystemCsupremNoch keine Bewertungen
- Cours AcquisitionDokument60 SeitenCours AcquisitionKhaled OuniNoch keine Bewertungen
- 4 Debitmetre CoriolisDokument4 Seiten4 Debitmetre CoriolisSofiane MoussaouiNoch keine Bewertungen
- Corrige td1 PDFDokument3 SeitenCorrige td1 PDFKhaoula TergouNoch keine Bewertungen
- Corrige Sujet EMD L3 Instrumentation CapteursDokument2 SeitenCorrige Sujet EMD L3 Instrumentation Capteurssage blanqui nzaouNoch keine Bewertungen
- 7.CEM - Réduction Des Couplage PDFDokument19 Seiten7.CEM - Réduction Des Couplage PDFfaycelNoch keine Bewertungen
- Compte Rendu ElectrothecniqueDokument13 SeitenCompte Rendu ElectrothecniqueBadreddineNoch keine Bewertungen
- Sujet 19Dokument18 SeitenSujet 19ayman lamzouriNoch keine Bewertungen
- Systèmes EmbarquésDokument34 SeitenSystèmes Embarquésjames noobNoch keine Bewertungen
- Tuto Vijeo1Dokument9 SeitenTuto Vijeo1AbouZakaria100% (1)
- TP MUX - 4vers1Dokument8 SeitenTP MUX - 4vers1Meriem MeriemNoch keine Bewertungen
- Ex 1 TP 3 DSPDokument4 SeitenEx 1 TP 3 DSPAmineSlamaNoch keine Bewertungen
- ReseauDokument36 SeitenReseaubabisoNoch keine Bewertungen
- TD°1Dokument3 SeitenTD°1kaoutaramr8Noch keine Bewertungen
- Chapitre 1 Grafset (API)Dokument12 SeitenChapitre 1 Grafset (API)priankasy679Noch keine Bewertungen
- Exercices LADDERDokument4 SeitenExercices LADDERfahd100% (1)
- Chiii Système ScadaDokument26 SeitenChiii Système Scadahit masterNoch keine Bewertungen
- Document TP Industrie4 - 2023 - VFDokument18 SeitenDocument TP Industrie4 - 2023 - VFZineb LamraniNoch keine Bewertungen
- Notices - StartoneDokument64 SeitenNotices - StartoneAmerico BarbosaNoch keine Bewertungen
- M204 Controleur Chapitre3 ModifiéDokument32 SeitenM204 Controleur Chapitre3 Modifiéahmad ahmadNoch keine Bewertungen
- Recueil AOPDokument6 SeitenRecueil AOPsmail elabidiNoch keine Bewertungen
- Infoplc Net FT027 Connexion Modbus RTU Variateurs V1000 PDFDokument9 SeitenInfoplc Net FT027 Connexion Modbus RTU Variateurs V1000 PDFPedro Antonio Martinez MazNoch keine Bewertungen
- SE1 - CMs Composants - de La Diode À l'ADIDokument160 SeitenSE1 - CMs Composants - de La Diode À l'ADIpierre_maréchalNoch keine Bewertungen
- GEII ElecNum TDDokument20 SeitenGEII ElecNum TDMohamed Zarboubi100% (1)
- 00 Présentation Générale 7PCGDokument61 Seiten00 Présentation Générale 7PCGSalvador FayssalNoch keine Bewertungen
- 6 - Conditionnement Du SignalDokument13 Seiten6 - Conditionnement Du SignalbaazizNoch keine Bewertungen
- Tp1 Presentation Materiel Utilise TP Traitement Signal PDFDokument13 SeitenTp1 Presentation Materiel Utilise TP Traitement Signal PDFFatma BelabedNoch keine Bewertungen
- Programmation Des Timers: 1. ObjectifsDokument5 SeitenProgrammation Des Timers: 1. ObjectifsHamza DarrarNoch keine Bewertungen
- 1 PBDokument13 Seiten1 PBElie Eklu100% (2)
- Avion À Propulsion Ionique: Aucune pièce mobile dans le système de propulsionVon EverandAvion À Propulsion Ionique: Aucune pièce mobile dans le système de propulsionNoch keine Bewertungen
- Expériences et observations sur l'électricité faites à Philadelphie en AmériqueVon EverandExpériences et observations sur l'électricité faites à Philadelphie en AmériqueNoch keine Bewertungen
- 01 La Fonction MemoireDokument1 Seite01 La Fonction MemoireKesraoui HichemNoch keine Bewertungen
- M16 - Réparation de Lave-Linge GE-REEDokument114 SeitenM16 - Réparation de Lave-Linge GE-REEKesraoui Hichem100% (2)
- 03 Operateur ET CDokument1 Seite03 Operateur ET CKesraoui HichemNoch keine Bewertungen
- M12 - Notions D'électronique GE-REEDokument77 SeitenM12 - Notions D'électronique GE-REEKesraoui HichemNoch keine Bewertungen
- M15 - Logique Séquentielle GE-REEDokument58 SeitenM15 - Logique Séquentielle GE-REEKesraoui HichemNoch keine Bewertungen
- M11 - Réparation de Cuisinières À Gaz GE-REEDokument40 SeitenM11 - Réparation de Cuisinières À Gaz GE-REEKesraoui Hichem100% (1)
- M13 - Logique Combinatoire GE-REEDokument65 SeitenM13 - Logique Combinatoire GE-REEKesraoui Hichem100% (1)
- TP 32 ParaboleDokument7 SeitenTP 32 ParaboleKesraoui HichemNoch keine Bewertungen
- M07 - Utilisation D'un Micro-Ordinateur GE-REEDokument139 SeitenM07 - Utilisation D'un Micro-Ordinateur GE-REEKesraoui HichemNoch keine Bewertungen
- M08 - Réparation de Moteurs Monophasés GE-REEDokument94 SeitenM08 - Réparation de Moteurs Monophasés GE-REEKesraoui HichemNoch keine Bewertungen
- M06 - Montage de Circuits Électriques GE-REEDokument97 SeitenM06 - Montage de Circuits Électriques GE-REEKesraoui HichemNoch keine Bewertungen
- M09 - Réparation de Robots Ménagers GE-REEDokument48 SeitenM09 - Réparation de Robots Ménagers GE-REEKesraoui HichemNoch keine Bewertungen
- M05 - Interprétation de Schémas Et de Manuels Techniques GE-REEDokument8 SeitenM05 - Interprétation de Schémas Et de Manuels Techniques GE-REEKesraoui Hichem0% (1)
- Lance Balles FonctionnelleDokument10 SeitenLance Balles FonctionnelleKesraoui Hichem100% (1)
- M21 Microcontrôleur-GE-MMODokument129 SeitenM21 Microcontrôleur-GE-MMOKesraoui HichemNoch keine Bewertungen
- M08 Usinage Manue Mesure Contrôle-GE-MMODokument100 SeitenM08 Usinage Manue Mesure Contrôle-GE-MMOKesraoui HichemNoch keine Bewertungen
- GE216Dokument161 SeitenGE216Kesraoui HichemNoch keine Bewertungen
- GE116Dokument84 SeitenGE116Kesraoui HichemNoch keine Bewertungen
- COURS GradateurDokument6 SeitenCOURS GradateurKesraoui HichemNoch keine Bewertungen
- Commande MCCDokument23 SeitenCommande MCCKesraoui HichemNoch keine Bewertungen
- 50 K EXCEL SHEET WD Gann Excel Sheet AUTO RUNDokument9 Seiten50 K EXCEL SHEET WD Gann Excel Sheet AUTO RUNKalpesh ShahNoch keine Bewertungen
- SQL 06052015Dokument7 SeitenSQL 06052015Walid_Sassi_TunNoch keine Bewertungen
- Acad Byw PDFDokument106 SeitenAcad Byw PDFadilos86Noch keine Bewertungen
- Cours Signaux Chapitre 5 6 ETUDIANTSDokument32 SeitenCours Signaux Chapitre 5 6 ETUDIANTSHacene OurtemacheNoch keine Bewertungen
- CoursDokument66 SeitenCoursOns AttiaNoch keine Bewertungen
- Gpao CoursDokument41 SeitenGpao Courssaid0n100% (4)
- Programme Forum Metiers Guadeloupe 04-10-17Dokument4 SeitenProgramme Forum Metiers Guadeloupe 04-10-17Université des AntillesNoch keine Bewertungen
- Exercice 1:: Donner Les Diagrammes de Machines de Turing Correspondants Aux Énoncés SuivantsDokument4 SeitenExercice 1:: Donner Les Diagrammes de Machines de Turing Correspondants Aux Énoncés SuivantsAmine SNOUSSINoch keine Bewertungen
- Groupe9 TPEDokument8 SeitenGroupe9 TPEDJELASSEM CYRILLENoch keine Bewertungen
- 001.PDF Texte PDFDokument28 Seiten001.PDF Texte PDFmlkojNoch keine Bewertungen
- Correction Cahier Les+Filetages+ 2016 Prof PDFDokument7 SeitenCorrection Cahier Les+Filetages+ 2016 Prof PDFsarah09112008100% (1)
- TDlogiqueDokument3 SeitenTDlogiqueben boubakerNoch keine Bewertungen
- TD1Dokument2 SeitenTD1Aminovitch IdrissiNoch keine Bewertungen
- A2-2 UalDokument3 SeitenA2-2 UalLabossef LabossefchedlyNoch keine Bewertungen
- Ed ReseauxDokument36 SeitenEd ReseauxMalal NdiayeNoch keine Bewertungen
- Rapport SteganoDokument95 SeitenRapport SteganoEuskaldunakNoch keine Bewertungen
- FP Tests de Personnalite Dans Le RecrutementDokument6 SeitenFP Tests de Personnalite Dans Le RecrutementsaredeenNoch keine Bewertungen
- ENJEUX INTERNES Et EXTERESDokument57 SeitenENJEUX INTERNES Et EXTERESmoez100% (7)
- Devoir Hors Classe 1ere AnneeDokument2 SeitenDevoir Hors Classe 1ere Anneegeniemaroc100% (1)
- Ir7086 7095 7105 tcm79-621965Dokument12 SeitenIr7086 7095 7105 tcm79-6219651cisco1Noch keine Bewertungen
- Codes NumériquesDokument2 SeitenCodes NumériquesRasmi BaananouNoch keine Bewertungen
- Metrologie - Incertitude de MesureDokument6 SeitenMetrologie - Incertitude de MesureReignac100% (1)
- Theorie de L'information: Chapitre 2Dokument3 SeitenTheorie de L'information: Chapitre 2FeroukNoch keine Bewertungen
- CoursDevMobile Android 6 PDFDokument33 SeitenCoursDevMobile Android 6 PDFChiiNoch keine Bewertungen
- Programmation Orientée Objet Par C++ Héritage Et Fonctions Amies 2015-2016Dokument22 SeitenProgrammation Orientée Objet Par C++ Héritage Et Fonctions Amies 2015-2016Carlo Coco100% (1)
- Algorithme Des AbeillesDokument13 SeitenAlgorithme Des Abeillesbest.ever.2010100% (2)
- TD2 CorrDokument2 SeitenTD2 CorrAmeni BoughanmiNoch keine Bewertungen
- PDFDokument109 SeitenPDFGhanou StarlineNoch keine Bewertungen
- Bloc - Communication Schneider M580Dokument562 SeitenBloc - Communication Schneider M580Hajar MobhidNoch keine Bewertungen
- 3-DP SingletonDokument17 Seiten3-DP Singletonbesem boukhatemNoch keine Bewertungen