Beruflich Dokumente
Kultur Dokumente
P67
Hochgeladen von
Lucy WolfCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
P67
Hochgeladen von
Lucy WolfCopyright:
Verfügbare Formate
APROVECHAMIENTO HOLSTICO DE LA MECATRNICA EN LOS PROCESOS DE MANUFACTURA INDUSTRIALES
Aguinaga, lvaro Ph.D. Msc. Ing.
alvaro.aguinaga@epn.edu.ec. Escuela Politcnica Nacional de Quito Facultad de Ingeniera Mecnica RESUMEN: Una definicin general de Mecatrnica es la integracin sinrgica entre la ingeniera mecnica con la electrnica y sistemas computarizados de control inteligente en el diseo y manufactura de productos y procesos. El holismo se define como el tratamiento de un tema que implica todos sus componentes, con sus relaciones. Se usa como una nueva solucin a un problema. El holismo enfatiza la importancia del todo, que es ms grande que la suma de las partes (sinergia), y da importancia a la interdependencia de stas. La hiptesis de la presente ponencia, es justamente, que la aplicacin de la mecatrnica, en los procesos de manufactura industriales debe ser holstica, considerando as a la mecatrnica como una filosofa o una forma de pensamiento, mas que una tecnologa en si mismo. En un mercado global y competitivo, las compaas necesitan contar con la habilidad de incrementar la competitividad de sus productos y sistemas mediante el uso de tecnologa, y deben poder responder rpidamente y efectivamente a los cambios en el mercado. Las estrategias de la mecatrnica han demostrado ser efectivas para esto y para revitalizar productos y sistemas ya existentes, por esta razn la mecatrnica actualmente est considerada dentro de las diez tecnologas emergentes.
1. DEFINICIN DE MECATRNICA(1,3,4): Toda sociedad humana produce conocimiento y utiliza tcnicas para resolver sus problemas. La ciencia es el conjunto de conocimientos obtenidos mediante la observacin y el razonamiento, sistemticamente estructurados y de los que se deducen principios y leyes generales. La ciencia bsica o pura tiene carcter general y su objetivo es el conocimiento desinteresado del mundo y el ser humano, sin motivaciones prcticas. La ciencia aplicada tiene el objetivo de conocer al mundo para controlarlo. La definicin sintetizada de la tecnologa se plantea como la aplicacin prctica de los conocimientos cientficos y la experiencia para mejorar el nivel y la calidad de vida de los seres humanos. La ingeniera es la profesin en la cual se aplican los conocimientos cientficos y tecnolgicos con la funcin principal de disear o desarrollar soluciones tecnolgicas a necesidades sociales, industriales y econmicas, esta aplicacin debe ser realizada con criterio y conciencia en beneficio de la humanidad. La ingeniera se ha desarrollado con el ser humano, desde que ste utiliz sus primeras herramientas talladas para su defensa, la cacera o en el encender fuego. El hombre empez a desarrollar tecnologas para producir metales resistentes, arcos, vestimenta, arado. Posteriormente, adems de sus propias herramientas, se sustituy la fuerza del hombre por la fuerza animal, a partir del surgimiento del arado. Una ruptura fundamental en el desarrollo de la ingeniera, con un profundo cambio tecnolgico constituye la revolucin industrial en que se substituye la fuerza muscular del hombre y los animales por mquinas, con las que se conforman industrias de manufactura de los ms diversos productos. Con esta revolucin industrial se posibilita la etapa de la mecanizacin, caracterizada por la produccin en serie, el descubrimiento y uso de nuevas, para ese entonces, fuentes de energa, una revolucin paralela en el desarrollo del transporte y la aplicacin de la ciencia y la tecnologa en el desarrollo de mquinas para mejorar los procesos productivos.
PALABRAS CLAVE: Mecatrnica, Cad, Cam, Cim, Automatizacin, Robtica.
En esta etapa, las mquinas, en general, eran controladas manualmente por operadores, con algunos componentes o subsistemas automatizados con controles mecnicos, elctricos, hidrulicos y/o neumticos. Despus de la segunda guerra mundial se produce un increble y vertiginoso desarrollo de la electrnica, informtica y comunicaciones, con la consecuente utilizacin de estas tecnologas en las industrias de manufactura y los procesos de produccin. Esta implementacin, mejora ampliamente la productividad, incrementando la velocidad de produccin y la calidad de los productos, disminuyendo los costos de fabricacin y asegurando la seguridad industrial y sostenibilidad ambiental. Actualmente, las mquinas y los procesos industriales son en un alto porcentaje automatizados con controladores electrnicos y computarizados. Es tan alto el impacto que ha tenido el uso de estas tecnologas, que esta demostrado que la industria productiva que no alcanza niveles adecuados de automatizacin y utilizacin de estas tecnologas, no puede competir, en el mundo globalizado actual. Estos adelantos cientficos y tecnolgicos han posibilitado el aparecimiento de nuevas disciplinas como la automatizacin inteligente, integracin CAD/CAM, fabricacin flexible CIM, Robtica y otras que son agrupadas en la Mecatrnica, y que en la actualidad tienen una aplicacin amplia e intensiva en diferentes campos del quehacer humano y en particular en los procesos industriales de manufactura. El trmino Mecatrnica fue definido inicialmente en 1969 por ingeniero japons de nombre Tetsuro Moria, en la compaa japonesa Yasakawa, como una combinacin de Meca de la palabra mecanismo y trnica de la palabra electrnica. Una definicin general de Mecatrnica es la integracin sinrgica entre la ingeniera mecnica con la electrnica y sistemas computarizados de control inteligente en el diseo y manufactura de productos y procesos. Otra definicin indica que la Mecatrnica es una disciplina integradora que utiliza las tecnologas de la mecnica, electrnica y tecnologa de informacin para proveernos de productos, procesos y sistemas mejorados.
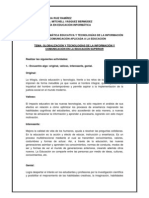
Tambin se considera que la Mecatrnica sirve para la resolucin de problemas industriales, cientficos y tecnolgicos de una manera integral, es decir utilizando un enfoque tecnolgico integral. La mecatrnica ofrece la oportunidad de ver los problemas de ingeniera de diseo y de produccin desde una perspectiva diferente, donde los ingenieros mecnicos no se limitan a analizar y sintetizar un problema slo en trminos mecnicos, sino tambin en funcin de una gama de tecnologas: electrnica, control e informtica, que no deben considerarse como partes agregadas al equipo sino adoptar un enfoque mecatrnico, es decir sistmico, integrador, sinrgico u holstico. La Sinergia es la accin de dos o ms causas cuyo efecto es superior a la suma de los efectos individuales, por lo que la Mecatrnica es muvho ms que la suma de las tres disciplinas: mecnica, electrnica e informtica por lo que es una buena forma de pensar en la Mecatrnica como el campo definido por la interseccin de estas tres reas, como se v en la figura No. 1.
Figura No. 1: Definicin de Mecatrnica El holismo se define como el tratamiento de un tema que implica todos sus componentes, con sus relaciones. Se usa como una nueva solucin a un problema. El holismo enfatiza la importancia del todo, que es ms grande que la suma de las partes (sinergia), y da importancia a la interdependencia de stas. Holstico se utiliza como sinnimo de sistmico. Cuando se recomienda por ejemplo tener una visin holstica significa que se deben ver las cosas completas de manera integral, no en partes.
Desde temprana edad nos ensean a simplificar un problema para facilitar el anlisis y la solucin del mismo, esta fragmentacin del problema provoca que se pierda de vista de interrelacin entre las partes y de totalidad de los sistemas, por lo que en la Mecatrnica se hace necesario destruir la ilusin de que los sistemas estn compuestos por componentes separados, el abandonar esta ilusin posibilita disear y manejar sistemas inteligentes. La hiptesis de la presente ponencia, es justamente, que la aplicacin de la Mecatrnica, en los procesos de manufactura industriales debe ser holstica, considerando as a la Mecatrnica como una filosofa o una forma de pensamiento, mas que una tecnologa en si mismo. Dentro de ste enfoque sistmico u holstico se han diseado, desarrollado, instalado, controlado y estan en funcionamiento diferentes tipos de sistemas mecatrnicos (ver Figura No. 2) en los procesos de manufactura industriales: Automatizacin inteligente, sistemas CAD CAM CAE, integracin CAD/CAM, manufactura o fabricacin flexible CIM, robtica de manipuladores y mvil, sistemas que tienen incorporados inteligencia artificial y redes neuronales, etc.
En un mercado global y competitivo, las compaas necesitan contar con la habilidad de incrementar la competitividad de sus productos y sistemas mediante el uso de tecnologa, y deben poder responder rpidamente y efectivamente a los cambios en el mercado. Las estrategias de la Mecatrnica han demostrado ser efectivas para esto y para revitalizar productos y sistemas ya existentes, por esta razn la mecatrnica actualmente est considerada dentro de las diez tecnologas emergentes. 2. AUTOMATIZACIN INTELIGENTE(7): Un sistema es un conjunto de elementos que interactan para cumplir unos objetivos determinados. El control de un sistema acta sobre el mismo para que este cumpla con sus objetivos. Los componentes principales del control son: Sensores: Son dispositivos que establecen, detectan o sensan parmetros de los sistemas fsicos y envan esta informacin a un controlador. Controlador: Es el cerebro que adems de almacenar informacin, recibe informacin de los sensores, procesa informacin y enva rdenes a los actuadores para que accionen sobre el sistema en vista a lograr que este logre sus objetivos. Actuadores: Son dispositivos que reciben las rdenes por parte del controlador y accionan o actan sobre un sistema para controlarlo. Cuando no interviene un operador humano, sino son elementos artificiales los que efectan el control, este se llama control automtico y el sistema en general automatizado. Es decir la relacin entre el control de un sistema automatizado con la planta, proceso o sistema controlado, se da a travs de los sensores y actuadores (ver Figura No. 3) los que son elementos mecnicos, elctricos y electrnicos Los controladores actuales, como el caso del PLC, Controladores Lgicos Programables, son elementos electrnicos que adems son programables. Sin embargo el nivel de los programas y en general del software de apoyo y recursos informticos es limitado en estos componentes, puesto que el controlador se programa especficamente para cumplir con su funcin de recibir las seales de los sensores,
Figura No. 2: Sistemas Mecatrnicos Generalmente mecatrnico caractersticas: un sistema tiene las o producto siguientes
Eficiente. Bajo Costo. Preciso. Confiable. Flexible. Funcional. Mecnicamente menos complejo.
procesar la informacin y enviar rdenes a los actuadores o preactuadores.
Nivel de Supervisin, en el cul estn computadoras personales los llamados SCADA, que son sistemas de supervisin y adquisicin de datos, supervisan a los controladores y efectan un control indirecto enviando las consignas o referencias a los controladores para que estos puedan efectuar su funcin y, adicionalmente reciben los datos de los diferentes sensores del proceso, sensores que estn detectando y transmitiendo los valores de las salidas del proceso. Es importante recalcar que en el Nivel de Supervisin se usan PCs, lo que permite en este nivel la utilizacin de potente software de modelacin y simulacin, bases de datos industriales, programas de operacin y mantenimiento, entre otros. Tambin el uso de PCs, posibilita formas de comunicacin inalmbrica como la celular y el internet, razones por las que un Director Tcnico, por ejemplo puede monitorear la operacin de un proceso e inclusive enviar consignas para los controladores a gran distancia. El Nivel de Gestin, est en la cspide de la pirmide, con el uso de Pcs comunicadas por red con el SCADA, posibilita dotar de la informacin necesaria para que los Directivos y alta gerencia de una industria puedan tomar adecuadamente sus decisiones. Esta informacin tcnica adems se entrega de tal manera y utilizando las interfaces amigables, para que un directivo que desconoce del rea tcnica pueda interpretar y comprender estos datos para utilizarlos en la gestin. Como se puede concluir de esta seccin, un sistema automatizado de una industria actualmente dispone de componentes mecnicos principalmente en la planta y los actuadores, elementos electrnicos en los controladores, sensores y actuadores; y, tambin dispone de componentes informticos en los programas y software usados en los controladores en las PCs de SCADA y en las de gestin. Sin embargo, esto no los hace necesariamente sistemas mecatrnicos, de conformidad con la hiptesis que se est llevando en la presente ponencia, un sistema industrial automatizado ser realmente un sistema mecatrnico si la concepcin en la aplicacin es holstica, por ejemplo el programa del PLC o el sistema SCADA debern responder a las verdaderas necesidades de funcionamiento del proceso y tener las prestaciones necesarias para llevar adelante una operacin y mantenimiento efectivo y seguro.
Figura No. 3: Automatizacin de una planta. Sin embargo, el empleo de computadores y autmatas programables, como herramienta esencial para un control efectivo y mejor nivel de tratamiento de la informacin, es habitual en las plantas industriales modernas, as como la implantacin de redes de comunicacin internas, cumpliendo la llamada pirmide de automatizacin como la que se presenta en la figura No. 4.
Figura No. 4: Pirmide de automatizacin. En la parte inferior de la pirmide de automatizacin se encuentra la planta o el proceso industrial controlado con los respectivos sensores que detectan y miden los parmetros operativos y los actuadores que accionan sobre las entradas del proceso para controlarlo. Este nivel se lo conoce como Nivel de Campo. El siguiente nivel superior es el que le corresponde a los controladores como los PLCs, estos componentes son los que efectan directamente la funcin de controlar el proceso. Como se indic un PLC tiene un programa que partiendo de la lectura de las entradas, procesa la informacin y escribe los resultados del programa en las salidas que estn conectadas a los actuadores o preactuadores. Este se lo conoce como Nivel de Clula. El siguiente nivel superior, llamado
3. FABRICACIN FLEXIBLE (CIM)(6): Producir es un proceso de transformacin por el que los materiales brutos se convierten en productos acabados, que tienen un valor en el mercado, con una combinacin de mano de obra, maquinarias, herramientas especiales y energa. La mquina herramienta ha jugado un papel fundamental en el desarrollo tecnolgico del mundo hasta el punto que no es una exageracin decir que la tasa del desarrollo de mquinas herramientas gobierna directamente la tasa del desarrollo industrial. Dado el alto nivel de competitividad en el mercado nacional e internacional, las compaas necesitan abatir sus tiempos de diseo y manufactura. El control numrico se introdujo en los procesos de fabricacin por la necesidad de fabricar productos que no se podan conseguir en cantidad y calidad suficientes sin recurrir a la automatizacin del proceso de fabricacin, por la necesidad de obtener productos hasta entonces imposibles o muy difciles de fabricar, por ser excesivamente complejos para ser controlados por un operador humano y por la necesidad de fabricar productos a precios suficientemente bajos. Inicialmente, el factor predominante que condicion todo automatismo fue el aumento de productividad. Posteriormente, debido a las nuevas necesidades de la industria aparecieron otros factores no menos importantes como la precisin, la rapidez y la flexibilidad. La aplicacin de los sistemas computacionales para el diseo y la manufactura han tenido un amplio desarrollo y se han extendido a diversos sectores productivos. El Control Numrico por Computadora (CNC) se obtiene describiendo las operaciones de la mquina en trminos de los cdigos especiales y de la geometra de formas de los componentes, creando archivos informticos especializados o programas de piezas. El CAD (Computer Aided Design), o diseo asistido por computador, permite al diseador crear imgenes de partes, circuitos integrados, ensamblajes y modelos de prcticamente todo lo que se le ocurra en una estacin grfica conectada a un computador Estas imgenes se transforman en la base de un nuevo diseo, o en la modificacin de uno previamente existente. A stas se le asignan propiedades
geomtricas, cinticas, del material entre otras, mejorando as el diseo sobre papel. Se logra as una mayor velocidad en el diseo, al existir la posibilidad de corregir, encargndose el computador de recalcular el dibujo. Existen sistemas CAD especiales para aplicaciones mecnicas, electrnicas y de arquitectura, los cuales permiten una mejor interrelacin con sus respectivos sistemas CAE. El CAE (Computer Aided Engineering), o ingeniera asistida por computador, es la tecnologa que analiza un diseo y simula su operacin para determinar su apego a las condiciones de diseo y sus capacidades. Hoy en da, CAE es casi dos tecnologas separadas: una es la aplicada a la mecnica y otra a la electrnica. Ambas realizan extensos anlisis respecto de las leyes fsicas, as como de los estndares de la industria. El CAE mecnico, en particular, incluye un anlisis por elementos finitos (FEA, finite element analysis) para evaluar las caractersticas estructurales de una parte y programas avanzados de cinemtica para estudiar los complejos movimientos de algunos mecanismos. El CAE electrnico, asimismo, permite verificar los diseos antes de fabricarlos, simular su uso y otros anlisis tcnicos para evitar perder tiempo y dinero. CAM es el acrnimo de Computer Aided Manufacturing o produccin asistida por computadora. Se trata de la tecnologa implicada en el uso de computadores para realizar tareas de: modelacin geomtrica, planificacin, programacin, inspeccin, ensamblado y embalaje de la produccin. El trmino CAM se puede definir como el uso de sistemas informticos para la planificacin, gestin y control de las operaciones de una planta de fabricacin mediante una interfaz directa o indirecta entre el sistema informtico y los recursos de produccin.
Figura No. 5: Ciclo del Producto.
CAD, CAM y CAE son tecnologas que tratan de automatizar computarizadamente y hacerlas ms eficientes a las tareas ms importantes del ciclo del de producto, como se puede observar en la Figura No. 5. Con estas tecnologas inteligentes se estn consiguiendo cada vez ms todos los beneficios potenciales de integrar las actividades de diseo y fabricacin del ciclo de producto. Computer Integrated Manufacturing (CIM) o manufactura integrada por computador es el lado de sta que reconoce que los diferentes pasos en el desarrollo de productos manufacturados estn interrelacionados y pueden ser ajustados de manera ms eficiente y efectiva con el uso de computadores. A pesar de que CIM implica integrar todos los pasos de un proceso de manufactura, en la prctica muchas compaas han logrado grandes beneficios al implementar sistemas CIM parciales, es decir, en solo algunas reas de la empresa. De hecho, se cree que an no existe ninguna empresa que haya logrado una integracin total del sistema. Sin embargo, se sabe con certeza que se es el prximo paso a seguir. CIM incluye todas las actividades desde la percepcin de la necesidad de un producto; la concepcin, el diseo y el desarrollo del producto; tambin la produccin, marketing y soporte del producto en uso. Toda accin envuelta en estas actividades usa datos, ya sean textuales, grficos o numricos. El computador, hoy en da la herramienta ms importante en la manipulacin de datos, ofrece la real posibilidad de integrar las ahora fragmentadas operaciones de manufactura en un sistema operativo nico. Este acercamiento es lo que se denomina manufactura integrada por computador. En el sistema CIM existen cinco dimensiones fundamentales: Administracin general del negocio Definicin del producto y del proceso Planificacin y control del proceso Automatizacin de la fbrica Administracin de las fuentes informacin
existen dos aspectos: el intangible, el cual es la informacin misma, y el tangible, el cual incluye los computadores, dispositivos de comunicacin, etc. La implementacin de este sistema por parte de algunas empresas busca, por un lado, aumentar la productividad y, por otro, mejorar la calidad de los productos. Un reciente estudio aporta informacin sobre los beneficios que ha trado el CIM a empresas que lo han implementado. Esta tecnologa tiene el objetivo de aunar las islas de automatizacin computarizada conjuntndolas para que cooperen en un sistema nico y eficiente. El CIM trata de usar una nica base de datos que integre toda la informacin de la empresa y a partir de la cual se pueda realizar una gestin integral de todas las actividades de la misma, repercutiendo sobre todas las actividades de administracin y gestin que se realicen en la empresa, adems de las tareas de ingeniera propias del CAD y el CAM. Se dice que el CIM es ms una filosofa de negocio que un sistema informtico. Nuevamente y de conformidad con lo explicitado en este punto, estas tecnologas sern mecatrnicas, cuando su aplicacin en los procesos industriales de fabricacin sea integral u holstica.
4. ROBTICA(5): El escritor Karel Capek introduce la palabra "robot, que sale de la palabra checa robota, que significa trabajo pesado y repetitivo, en su novela llamada Rossums Universal Robots, esta novela describe una sociedad en la cual todo el trabajo es realizado por hombres mecnicos, al final los robots se rebelan y destruyen a sus creadores humanos. El desarrollo de la industria de robots ha sido muy rpido, se habla de nuevos robots escaladores, submarinos y voladores. Las capacidades de las mquinas se incrementan rpidamente, nuevos y mejores robots son entregados al mercado cada ao. Robots inteligentes, capaces de relacionarse con su entorno, mediante el uso de realimentacin sensorial, de aprender por si mismo y de tomar decisiones. Estos robots estn dotados de inteligencia artificial, tema respecto al cul, se estn en la actualidad realizando grandes esfuerzos en su investigacin.
de
Cada una de estas cinco dimensiones es un compuesto de otros procesos ms especficos de manufactura, los cuales han demostrado una afinidad entre ellos. La primera dimensin rodea a las otras cuatro, y la quinta es el corazn del proceso. Respecto de esta ltima,
vertical, perpendicular al primero. La otra articulacin es prismtica. Robot cilndrico: Este robot tiene la cintura como articulacin rotatoria y las otras dos articulaciones son prismticas. Robot cartesiano: Las tres articulaciones son prismticas. Robot Scara: Es una especie de robot polar, pero la cintura y el hombro rotan en planos paralelos horizontales. La otra articulacin es prismtica. Para el anlisis y sntesis del movimiento de un robot manipulador se utiliza la cinemtica directa y la cinemtica inversa, como se puede apreciar en la Figura No. 7.
Figura No. 6: Componentes de un Robot La concepcin de la robtica en su sentido ms amplio abarca en la actualidad a sistemas muy diversos que involucren: sensores, actuadores, control automtico computarizado e inteligentes es decir con capacidad de relacin con el entorno a travs de retroalimentacin sensorial, autoprogramacin y toma de decisiones. En sus aplicaciones industriales se definen dos vertientes de la robtica: la Robtica de Manipuladores y la Robtica Movil. El Robotics Institute of America define a un robot manipulador como reprogramable y multifuncional diseado para mover materiales, partes, herramientas o dispositivos especializados a travs de movimientos variables programados para la realizacin de mltiples tareas. Los robots industriales tienen caractersticas antropomrficas, es decir muy similares a un brazo humano distinguindose: Codo: (Elbow) articulacin. Hombro: En que se pueden identificar las articulaciones hombro (Shoulder) y la articulacin cintura (arm sweep). Mueca: En que se pueden distinguir tres articulaciones: balanceo (roll), cabeceo (pitch) y oscilacin (yaw). Adicionalmente se tiene el efector final, el cual es la mano del robot que le proporciona al robot varias posibilidades ms de movimiento, en esta pueden encontrarse herramientas de produccin unas tenazas o garras. Por el tipo de movimientos los robots manipuladores Se clasifican en: Robot angular (Puma): El hombro, cintura y codo tienen articulaciones rotatorias. Robot polar: El hombro y la cintura tienen articulaciones rotatorias, la cintura rota en un plano horizontal y el hombro en un plano
Figura No. 7: Cinemtica directa e inversa. Se distinguen dos tipos de robots mviles, los robots con ruedas y los robots con patas o caminantes. Los primeros intentos se realizaron con robots con ruedas; la locomocin sobre ruedas siempre ha parecido ser superior a la locomocin animal, sin embargo para este caso necesitamos transitar por superficies con algn nivel de preparacin. La configuracin mecnica de la mayora de los vehculos mviles con ruedas puede clasificarse en tres categoras: Vehculos con ruedas directrices: los cuales estn formados por un eje trasero fijo con dos ruedas u orugas y una rueda o un eje con dos ruedas delanteras directrices, la cual a veces tambin puede ser motriz. Vehculos con mecanismo diferencial: los cuales tienen ruedas y orugas traseras que se controlan independientemente (la velocidad relativa de las ruedas a cada lado). Una ventaja importante de estos vehculos diferenciales es que se pueden girar con un radio nulo, mientras que las ruedas directrices necesitan un radio grande para girar. Vehculos con ruedas directrices/motrices: los cuales estn formados por ruedas que
tienen las caractersticas de ser ruedas motrices y directrices al mismo tiempo. En otro tipo de superficie: muy irregulares, blandas, pedregosos, pendientes y laderas, terrenos con obstculos, etc. Los vehculos con ruedas presentan muchos problemas para desplazarse, siendo mucho ms efectivo el uso de uso de maquinas con patas o caminantes. Las patas no presentan tantos problemas de deslizamiento o atascamiento como las ruedas en superficies blandas. Las patas daan mucho mas el terreno, representan mayor movilidad y velocidad, mayor capacidad para vencer obstculos y mejor rendimiento energtico. Sin embargo una mquina caminante es mucho ms compleja de ser diseada, construida y controlada que un vehculo con ruedas. La construccin de un vehculo caminante que pueda acreditar cierta utilidad depende de reas muy dispares de la ciencia y la tecnologa: diseo de mecanismos, control del equilibrio, distribucin de las fuerzas, integracin sensorial, etc. Los recursos dedicados a estos temas en las ltimas dcadas han sido muy importantes, a pesar de ello, las ltimas realizaciones de mquinas mviles con patas son an grandes, pesadas y lentas, pero hacen prever que tendrn una gran importancia en un futuro prximo, en tareas de exploraciones, tanto espaciales como terrestres y submarinas, as como en tareas de inspeccin y proteccin civil. BIBLIOGRAFIA 1. Bishop Robert, Mechatronics An Introduction, CRC Press, New York, 2006. 2. Preumont A, Mechatronics Dynamics of Electromechanical and Piezoelectric Systems, Springer, 2006. 3. Bolton W., Mecatrnica Sistemas de Control Electrnico en Ingeniera Mecnica y Elctrica, Alfaomega, 2da. Edicin, Mxico, 2002. 4. Senge Peter, La Quinta Disciplina, Granica, Argentina, 2005. 5. Sandin Paul, Robot Mechanisms and Mechanical Devices Illustrated, McGraw Hill, New York, 2003. 6. Teicholz, E. & Orr N.J. Computer Integrated Manufacturing Handbook. Editorial McGraw-Hill. 2003. 7. Ribeiro M, Automatizacin Industrial, Edit. Hemus., Sao Paulo, 2002.
AUTOR: Ingeniero Mecnico Escuela Politcnica Nacional 1986. Doctor en Ingeniera Mecnica (Ph.D.) de la Universidad Politcnica Bialostocka en Polonia 1991. Master (Msc.) en Tecnologas de la Informacin para la Fabricacin Universidad Politcnica de Madrid 2002. Especialista en Robtica (Canad y Espaa). Profesor universitario e investigador desde hace ms de 22 aos. Actualmente Subdecano de la Facultad de Ingeniera Mecnica de la EPN. Ha ocupado dignidades acadmicas en la Escuela Politcnica Nacional y otras Universidades. Director de mltiples Tesis de Grado en Postgrado y Pregrado. Director y participante en ms de 20 proyectos de investigacin y consultoras. Ha dictado mas de 60 seminarios en las reas de Ingeniera y Confiabilidad, Automatizacin Industrial, Procesos Industriales de Fabricacin, Manejo Energtico y Robtica. Autor de varios libros y folletos en sus reas de especializacin. Ponente de varios foros y jornadas cientfico-tecnolgicas nacionales e internacionales.
Das könnte Ihnen auch gefallen
- Lvi 906 118 201804Dokument2 SeitenLvi 906 118 201804dfsdf0% (1)
- Plan de Trabajo 07-10 de FebreroDokument21 SeitenPlan de Trabajo 07-10 de FebreroMiriam Zepeda MolinaNoch keine Bewertungen
- Tema 1 Detección de GeopresionesDokument23 SeitenTema 1 Detección de GeopresionesJuan Esparza de Dios100% (2)
- Caso de Estudio Servicio Médico InglaterraDokument3 SeitenCaso de Estudio Servicio Médico InglaterraStephanie RodriguezNoch keine Bewertungen
- Sesion Modelo de Taller MatematicaDokument3 SeitenSesion Modelo de Taller MatematicaJUAN CARLOS ORURO REYESNoch keine Bewertungen
- Cambio y Continuidad en El Desarrollo de La PersonalidadDokument9 SeitenCambio y Continuidad en El Desarrollo de La PersonalidadJose OviedoNoch keine Bewertungen
- Caso Lan ChileDokument9 SeitenCaso Lan ChileValeska RojasNoch keine Bewertungen
- Técnicas de Presentación PDFDokument8 SeitenTécnicas de Presentación PDFraul_urb0% (1)
- Algoritmos de RecorteDokument13 SeitenAlgoritmos de RecorteAlfredo Richaud0% (1)
- TEORIA ANTROPOLOGICA EnfermeriaDokument31 SeitenTEORIA ANTROPOLOGICA EnfermeriaCarrizo ThiagoNoch keine Bewertungen
- Ensayo de Reingeniería y BenchmarkingDokument2 SeitenEnsayo de Reingeniería y BenchmarkingCarolina Rodriguez100% (1)
- La Psicologia de La GestaltDokument13 SeitenLa Psicologia de La GestaltMelody AyalaNoch keine Bewertungen
- Unidad IV Tipologia de Textos OralesDokument11 SeitenUnidad IV Tipologia de Textos OralesCARLOS ALBERTOMASS GUERRA ESTUDIANTENoch keine Bewertungen
- Examen - Ruiz Ramirez AliciaDokument2 SeitenExamen - Ruiz Ramirez AliciapocarutaNoch keine Bewertungen
- Como Controlar La Ira PDFDokument2 SeitenComo Controlar La Ira PDFJohnNoch keine Bewertungen
- El Noble Oficio de La Educacion PrimerasDokument22 SeitenEl Noble Oficio de La Educacion Primerascristina.xinrouNoch keine Bewertungen
- Transferencia - Contratransferencia PDFDokument2 SeitenTransferencia - Contratransferencia PDFJavieraFernandaNoch keine Bewertungen
- Examen Matematicas Acceso A Grado SuperiorDokument2 SeitenExamen Matematicas Acceso A Grado SuperiortxonatorNoch keine Bewertungen
- Tarea Academica 2 Presentacion Da AnDokument12 SeitenTarea Academica 2 Presentacion Da AnAngello YarascaNoch keine Bewertungen
- Demencia en El Adulto MayorDokument100 SeitenDemencia en El Adulto MayorCarla Castro YarascaNoch keine Bewertungen
- Infografía Algunas Cosas Que Puedes Hacer en Tu Tiempo Libre Divertido Ilustrado Sticker AzulDokument2 SeitenInfografía Algunas Cosas Que Puedes Hacer en Tu Tiempo Libre Divertido Ilustrado Sticker AzulLeonel GarzaNoch keine Bewertungen
- PABDokument12 SeitenPABprpracines3100% (1)
- Cvs Sobre WindowsDokument28 SeitenCvs Sobre WindowsLeticia EvangelistaNoch keine Bewertungen
- Caso Clinico Final PDFDokument96 SeitenCaso Clinico Final PDFjavier sanchez mariniNoch keine Bewertungen
- UPS-QT04011 (1) .Desbloqueado PDFDokument174 SeitenUPS-QT04011 (1) .Desbloqueado PDFHa-Neul YunNoch keine Bewertungen
- Guia Fenomenos #3-FUERZAS SOBRE SUPERFICIES PLANASDokument9 SeitenGuia Fenomenos #3-FUERZAS SOBRE SUPERFICIES PLANASYinethNoch keine Bewertungen
- Estudio Mercado HotelesDokument98 SeitenEstudio Mercado HotelesMiguel MacielNoch keine Bewertungen
- DiagramacionDokument47 SeitenDiagramacionanon-1734100% (7)
- Protocolo Cátedra Unidad 4 LuisaDokument3 SeitenProtocolo Cátedra Unidad 4 Luisaluisa andradeNoch keine Bewertungen
- Informe de Rendicion Cuentas CCLDokument4 SeitenInforme de Rendicion Cuentas CCLangelica romeroNoch keine Bewertungen