Das könnte Ihnen auch gefallen
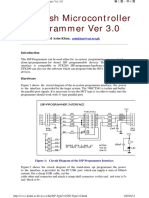
- ISP Flash Microcontroller Programmer Ver 3Dokument6 SeitenISP Flash Microcontroller Programmer Ver 3Anonymous Ek100RdbcHNoch keine Bewertungen
- Program Atmel 89 Series with ISP Flash ProgrammerDokument4 SeitenProgram Atmel 89 Series with ISP Flash ProgrammerSrđan PavićNoch keine Bewertungen
- Isp Flash Microcontroller Programme:8051 ProgrammerrDokument4 SeitenIsp Flash Microcontroller Programme:8051 ProgrammerrTol Man ShresthaNoch keine Bewertungen
- Avr Trainer Cara Buat Progam Dengan AvrDokument3 SeitenAvr Trainer Cara Buat Progam Dengan AvrMuh Iwan TaufikNoch keine Bewertungen
- Eeprom CommandsDokument13 SeitenEeprom CommandsEstanislau Constantino Da GraçaNoch keine Bewertungen
- Assembly Lab2Dokument10 SeitenAssembly Lab2DaWheng Vargas100% (1)
- The Assembly Language Programming Process 2Dokument5 SeitenThe Assembly Language Programming Process 2Akhilesh KumarNoch keine Bewertungen
- Objective: To Understand The Basic Concept and Functionality of Assembly LanguageDokument9 SeitenObjective: To Understand The Basic Concept and Functionality of Assembly LanguageKAMRAN KHANNoch keine Bewertungen
- Programming StepsDokument3 SeitenProgramming StepsAnirban MandalNoch keine Bewertungen
- WWW Mikroe Com Chapters View 67 Chapter 4 At89s8253 MicroconDokument51 SeitenWWW Mikroe Com Chapters View 67 Chapter 4 At89s8253 Microconramnag4Noch keine Bewertungen
- System Programming Unit-1 by Arun Pratap SinghDokument56 SeitenSystem Programming Unit-1 by Arun Pratap SinghArunPratapSingh100% (2)
- LAB#2Dokument9 SeitenLAB#2Yousuf JamalNoch keine Bewertungen
- ApplicationsDokument44 SeitenApplicationsmerinjose123100% (1)
- Code Vision AVRDokument3 SeitenCode Vision AVRMohammed AsharNoch keine Bewertungen
- Code Vision AVRDokument3 SeitenCode Vision AVRbennettmatthewNoch keine Bewertungen
- Read Serial Data Directly Into OctaveDokument8 SeitenRead Serial Data Directly Into OctavemadsonengNoch keine Bewertungen
- Comsats University: Lab # 01 Introduction To Development Tools and Lab SoftwareDokument7 SeitenComsats University: Lab # 01 Introduction To Development Tools and Lab SoftwareBilal HabibNoch keine Bewertungen
- Introduction To 8051 ProgrammingDokument24 SeitenIntroduction To 8051 Programmingveeramaniks408Noch keine Bewertungen
- Stand-alone SPI programmer circuit diagramDokument2 SeitenStand-alone SPI programmer circuit diagramductdt09Noch keine Bewertungen
- AVR Input Output Operations using RegistersDokument26 SeitenAVR Input Output Operations using Registersbala8350Noch keine Bewertungen
- Pépé Le Manual: The Name of The Story. This Compiler Has First Been Developed For The Palmos PlatformDokument65 SeitenPépé Le Manual: The Name of The Story. This Compiler Has First Been Developed For The Palmos PlatformSinisa HristovNoch keine Bewertungen
- Mplab 1Dokument75 SeitenMplab 1lingalashanthipriya_Noch keine Bewertungen
- Arm Assembly HomeworkDokument4 SeitenArm Assembly Homeworkafmtioefb100% (1)
- Algorithm: Terminal Defines The Starting and Ending Point of A FlowchartDokument7 SeitenAlgorithm: Terminal Defines The Starting and Ending Point of A FlowchartSofoniaNoch keine Bewertungen
- Ab Initio Custom Component PresentationDokument33 SeitenAb Initio Custom Component Presentationaustinfru100% (1)
- UprogDokument21 SeitenUprogJared TerroreNoch keine Bewertungen
- Programming PIC Microcontrollers in CDokument126 SeitenProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- ToscA UserManual3Dokument6 SeitenToscA UserManual3Anonymous uFZHfqpBNoch keine Bewertungen
- 29C512Dokument18 Seiten29C512kklos1Noch keine Bewertungen
- Multi-threaded Producer Consumer PipelineDokument7 SeitenMulti-threaded Producer Consumer PipelineSCA7th0% (1)
- EeupdateDokument12 SeitenEeupdateІгорNoch keine Bewertungen
- Using R&S Signal, Spectrum With MATLABDokument10 SeitenUsing R&S Signal, Spectrum With MATLABStarLink1Noch keine Bewertungen
- Atmel Avr Xmega DDokument309 SeitenAtmel Avr Xmega DRyosuke RaijiNoch keine Bewertungen
- TCS AspireDokument39 SeitenTCS AspireSai ChethanNoch keine Bewertungen
- Annexure For Beeprog+Dokument4 SeitenAnnexure For Beeprog+Mdd Papis0% (1)
- Lab Manual SP - FinalDokument60 SeitenLab Manual SP - FinalShaun BhattiNoch keine Bewertungen
- Changes and Corrections in FEMtools 3.5.2Dokument8 SeitenChanges and Corrections in FEMtools 3.5.2Hesham AhmedNoch keine Bewertungen
- Embedded Systems Overview Explains Key ConceptsDokument60 SeitenEmbedded Systems Overview Explains Key Conceptssathish.rf3120100% (1)
- Introduction To Assembly Language ProgrammingDokument27 SeitenIntroduction To Assembly Language ProgrammingKamini SalunkheNoch keine Bewertungen
- AlsaDokument19 SeitenAlsaDiego ZavalaNoch keine Bewertungen
- GNU Assembler Intro for ARM LabDokument7 SeitenGNU Assembler Intro for ARM LabrezadigitNoch keine Bewertungen
- Mic Project ReportDokument11 SeitenMic Project ReportDivya BansodeNoch keine Bewertungen
- Procedure and Macro in AssemblyDokument17 SeitenProcedure and Macro in AssemblyroshaanNoch keine Bewertungen
- Avr CoreDokument145 SeitenAvr CoreStephanie FloresNoch keine Bewertungen
- Speech Based Wheel Chair Control Final Project ReportDokument77 SeitenSpeech Based Wheel Chair Control Final Project ReportMohammed Basheer100% (4)
- Migration Monitor Users' Guide: 1. PrerequisitesDokument23 SeitenMigration Monitor Users' Guide: 1. PrerequisitesSB00046Noch keine Bewertungen
- 4A Programming Assignment: Windows and STFT (Week 4) : InstructionsDokument3 Seiten4A Programming Assignment: Windows and STFT (Week 4) : InstructionsjcvoscribNoch keine Bewertungen
- Read serial data directly into OctaveDokument8 SeitenRead serial data directly into OctavemakrsnakminesNoch keine Bewertungen
- Esd Unit 3,4,5Dokument67 SeitenEsd Unit 3,4,519-488 Karthik GoudNoch keine Bewertungen
- Xmega A Manual PrelimaryDokument445 SeitenXmega A Manual PrelimarytechnicalavrNoch keine Bewertungen
- The Program Segment Prefix (PSP) : CP/M Operating System CompatibilityDokument3 SeitenThe Program Segment Prefix (PSP) : CP/M Operating System CompatibilityKrishna KumarNoch keine Bewertungen
- Introduction To Assembly Language: Lab Experiment # 1Dokument4 SeitenIntroduction To Assembly Language: Lab Experiment # 1sanascollectionofficialNoch keine Bewertungen
- Tinaware LaunchpadDokument11 SeitenTinaware Launchpadryan cooper100% (1)
- 8051 Lab PDFDokument7 Seiten8051 Lab PDFikatsirisNoch keine Bewertungen
- Lab Manual 5 Semester Experiment No.01 Introduction To 8086 Microprocessor Emulator and RegistersDokument7 SeitenLab Manual 5 Semester Experiment No.01 Introduction To 8086 Microprocessor Emulator and RegistersArslan FaisalNoch keine Bewertungen
- 030903-Automatic Checksum GeneratorDokument8 Seiten030903-Automatic Checksum GeneratorspyeagleNoch keine Bewertungen
- Assembly Language:Simple, Short, And Straightforward Way Of Learning Assembly ProgrammingVon EverandAssembly Language:Simple, Short, And Straightforward Way Of Learning Assembly ProgrammingBewertung: 2 von 5 Sternen2/5 (1)
- Physics XI XIIDokument50 SeitenPhysics XI XIImechaboy2Noch keine Bewertungen
- Chemistry XI XII BookDokument43 SeitenChemistry XI XII Bookmechaboy2Noch keine Bewertungen
- Proeteus Ares FileDokument1 SeiteProeteus Ares Filemechaboy2Noch keine Bewertungen
- CatiaDokument5 SeitenCatiamechaboy2Noch keine Bewertungen
- CATIA V5 Tutorial (47pag)Dokument47 SeitenCATIA V5 Tutorial (47pag)surender0100% (16)
- Catia SurfaceDokument14 SeitenCatia Surfaceapi-3799982100% (2)
- How To Install XAMPP On WindowsDokument8 SeitenHow To Install XAMPP On WindowsTâm NguyễnNoch keine Bewertungen
- LN 10.8.X Lnstudioag En-UsDokument66 SeitenLN 10.8.X Lnstudioag En-UsbchrastinaNoch keine Bewertungen
- Mopups For Windows User Instruction Manual: ® ProfessionalDokument72 SeitenMopups For Windows User Instruction Manual: ® Professionaljmgon20Noch keine Bewertungen
- XYZmaker Suite User Manual: An All-Round 3D Authoring ToolDokument14 SeitenXYZmaker Suite User Manual: An All-Round 3D Authoring ToolAdalid LinaresNoch keine Bewertungen
- Hik ProConnect BrochureDokument7 SeitenHik ProConnect BrochureChen MichaelNoch keine Bewertungen
- Resume Rana SinghaDokument3 SeitenResume Rana SinghaRana SinghaNoch keine Bewertungen
- Installation Guide For The Suite Installer (Customer Programming Software and Radio Management)Dokument7 SeitenInstallation Guide For The Suite Installer (Customer Programming Software and Radio Management)Patricio Suarez GarciaNoch keine Bewertungen
- Checking The Software/firmware Versions: PreparingDokument3 SeitenChecking The Software/firmware Versions: PreparingJas TomahawkNoch keine Bewertungen
- Tentative CBLMDokument27 SeitenTentative CBLMRosavilla LaciaNoch keine Bewertungen
- HCIA-AI V3.0 Lab Guide PDFDokument169 SeitenHCIA-AI V3.0 Lab Guide PDFMuhammad RifkiNoch keine Bewertungen
- Windows Installation GuideDokument17 SeitenWindows Installation GuideRaju HydNoch keine Bewertungen
- Installation and setup of a facial recognition time terminalDokument16 SeitenInstallation and setup of a facial recognition time terminalCrina.DobreNoch keine Bewertungen
- XLS3000 Specsheet PDFDokument8 SeitenXLS3000 Specsheet PDFWenceslao CabreraNoch keine Bewertungen
- Culvert Master Users GuideDokument337 SeitenCulvert Master Users Guideantonio_poma_3100% (1)
- TOPSS ManualDokument94 SeitenTOPSS Manuallroserpu0% (1)
- ImPlant-STL Installation and User GuideDokument38 SeitenImPlant-STL Installation and User GuideManny Mendoza0% (1)
- Therm2 ManualDokument201 SeitenTherm2 ManualJohn WallNoch keine Bewertungen
- NetWorker 19.3 Installation GuideDokument134 SeitenNetWorker 19.3 Installation Guideasma merzouguiNoch keine Bewertungen
- AC 800M Getting StartedDokument140 SeitenAC 800M Getting StartedNguyễn Đình TháiNoch keine Bewertungen
- I Can Not Figure Out Your MistakeDokument5 SeitenI Can Not Figure Out Your Mistakemps125Noch keine Bewertungen
- Robot/SCHEDULE Enterprise OverviewDokument38 SeitenRobot/SCHEDULE Enterprise Overviewno_1345Noch keine Bewertungen
- Clevo M76T User ManualDokument298 SeitenClevo M76T User ManualAlexander Adamou50% (2)
- Spooky2 User's Guide 20170204 PDFDokument228 SeitenSpooky2 User's Guide 20170204 PDFAndi OlivierNoch keine Bewertungen
- Installation ProcedureDokument7 SeitenInstallation ProcedureHemant ModiNoch keine Bewertungen
- Navi Planner PDFDokument235 SeitenNavi Planner PDFAndrei Zaha100% (2)
- Install Xamarin.Android ManualDokument6 SeitenInstall Xamarin.Android ManualJhon Carrero LlatasNoch keine Bewertungen
- Superior Drummer 3 ManualDokument183 SeitenSuperior Drummer 3 ManualDiego Urgiles100% (2)
- Metavision ManualDokument78 SeitenMetavision ManualrischajayantyNoch keine Bewertungen
- Movebank and Google Earth Tutorial - STL Box Turtles CleanDokument15 SeitenMovebank and Google Earth Tutorial - STL Box Turtles Cleanapi-289639996Noch keine Bewertungen
- Lab Manual 1Dokument46 SeitenLab Manual 1Muneeb Khan0% (1)