Das könnte Ihnen auch gefallen
- S02.s1 Material PDFDokument40 SeitenS02.s1 Material PDFHELEN JULISSA MAMANI CONDORINoch keine Bewertungen
- S01.s1 - Sistemas de Transmisión de EngranajesDokument40 SeitenS01.s1 - Sistemas de Transmisión de EngranajesRodolfo Toro QuiroZNoch keine Bewertungen
- El DiferencialDokument7 SeitenEl Diferencialerik gomezNoch keine Bewertungen
- TransmisiónDokument14 SeitenTransmisiónDaniel SabinoNoch keine Bewertungen
- Tren de EngranesDokument12 SeitenTren de EngranesGlenda ColmenaresNoch keine Bewertungen
- Procesos de Manufactura Transmisiones2Dokument14 SeitenProcesos de Manufactura Transmisiones2sergio_murgaNoch keine Bewertungen
- Mecanismo de Transmision-FresadoraDokument23 SeitenMecanismo de Transmision-FresadoraLuis100% (1)
- UNIVERSIDAD NACIONAL DE INGENIERÍA Mono de Maquinas 1Dokument20 SeitenUNIVERSIDAD NACIONAL DE INGENIERÍA Mono de Maquinas 1Brenda CastroNoch keine Bewertungen
- Ejes de TransmisionDokument6 SeitenEjes de TransmisionAdan Alvares QuispeNoch keine Bewertungen
- Calculo Seleccionde CadenaDokument37 SeitenCalculo Seleccionde CadenaNelvin ChamoNoch keine Bewertungen
- Acoplamientos y TransmisionesDokument7 SeitenAcoplamientos y TransmisionesRobert WagnerNoch keine Bewertungen
- Tipos de EngranajesDokument10 SeitenTipos de EngranajesSamuel RodriguezNoch keine Bewertungen
- Diseño de Maquinas 2Dokument9 SeitenDiseño de Maquinas 2Celia Bravo de BompartNoch keine Bewertungen
- Trasmison de CadenasDokument9 SeitenTrasmison de CadenaspitipamNoch keine Bewertungen
- Transmiciones MecanicasDokument6 SeitenTransmiciones MecanicasBlanca RomeroNoch keine Bewertungen
- Taller 1 Calculo IntegralDokument8 SeitenTaller 1 Calculo IntegralAlejandro0% (1)
- Elementos Transmisores y Propagadores Del MovimientoDokument9 SeitenElementos Transmisores y Propagadores Del MovimientoJuan Carlos Martin100% (1)
- Transmisiones MecanicasDokument28 SeitenTransmisiones MecanicasAndrés RamírezNoch keine Bewertungen
- Unidad 3 Engranes Rectos CORREGIR 3.2 Y 3.3Dokument17 SeitenUnidad 3 Engranes Rectos CORREGIR 3.2 Y 3.3Hector AguilarNoch keine Bewertungen
- Engranajes Con CadenaDokument4 SeitenEngranajes Con CadenaMariano Perez0% (1)
- Transmision MecanicaDokument8 SeitenTransmision Mecanicafafi_21100% (2)
- Ruedas y Cadenas PDFDokument32 SeitenRuedas y Cadenas PDFjmfernandez_bellzebuNoch keine Bewertungen
- Trabajo 10 EngranesDokument8 SeitenTrabajo 10 EngranesRAMON ESQUIVEL MORENONoch keine Bewertungen
- Engranajes, Transmisiones Cadena y CorreaDokument11 SeitenEngranajes, Transmisiones Cadena y CorreaManuel Fernando Martín ForeroNoch keine Bewertungen
- Transmisionporcorreaycadena 150628003101 Lva1 App6892Dokument54 SeitenTransmisionporcorreaycadena 150628003101 Lva1 App6892MariangelesVasconezNoch keine Bewertungen
- Correas y CadenasDokument6 SeitenCorreas y Cadenasgrecia mataNoch keine Bewertungen
- Exposicion CinematicaDokument11 SeitenExposicion CinematicaFelix SantanaNoch keine Bewertungen
- Proyecto TransmisionDokument70 SeitenProyecto TransmisionfriedforeverNoch keine Bewertungen
- Ensayo Sistemas de Transmision FlexibleDokument43 SeitenEnsayo Sistemas de Transmision Flexibleesteban rodriguezNoch keine Bewertungen
- Proyecto de Elementos de Maquina Sierra Circular Melanie SanchezDokument4 SeitenProyecto de Elementos de Maquina Sierra Circular Melanie SanchezMelany SanchzNoch keine Bewertungen
- Manual Sistemas Suspension Modelos Convencionales Elementos Tipos ControlDokument19 SeitenManual Sistemas Suspension Modelos Convencionales Elementos Tipos ControlDiego MartinNoch keine Bewertungen
- Elementos de Transmision de PotenciaDokument7 SeitenElementos de Transmision de PotenciaRony MeCaNoch keine Bewertungen
- Manual Sistemas Suspension Modelos Convencionales Elementos Tipos ControlDokument18 SeitenManual Sistemas Suspension Modelos Convencionales Elementos Tipos ControlAlejandro Fabián MoreyraNoch keine Bewertungen
- Mec - 1 - Transmisiones Por CorreasDokument62 SeitenMec - 1 - Transmisiones Por CorreasRoman TaielNoch keine Bewertungen
- Preg Mecanismos 1er ParcialDokument8 SeitenPreg Mecanismos 1er Parcialagustina.repettoNoch keine Bewertungen
- Sistemas MecánicosDokument10 SeitenSistemas MecánicosM Celeste MartinezNoch keine Bewertungen
- Tec-1 Reductor de VelocidadDokument30 SeitenTec-1 Reductor de VelocidadEvet CachoNoch keine Bewertungen
- Trabajo de Tr2 - Mecanica de MantenimientoDokument9 SeitenTrabajo de Tr2 - Mecanica de MantenimientoTaniia Estefani Ch C60% (5)
- Elementos Mecánicos Transmisores Del Movimiento 2Dokument37 SeitenElementos Mecánicos Transmisores Del Movimiento 2Falfonso69Noch keine Bewertungen
- El Sistema de TransmisiónDokument12 SeitenEl Sistema de Transmisiónselene camel ramirezNoch keine Bewertungen
- Fajas y PoleassDokument21 SeitenFajas y PoleassJose De La Flor Tito100% (1)
- Sistemas de Transmisión MecánicaDokument27 SeitenSistemas de Transmisión MecánicaEduardo Alex Eugenio MendezNoch keine Bewertungen
- TRANSMISIÓN POR BANDAS Y CADENAS ChemaDokument26 SeitenTRANSMISIÓN POR BANDAS Y CADENAS ChemaVicente G. CortezNoch keine Bewertungen
- Transmisiones MecánicasDokument7 SeitenTransmisiones MecánicasMattNoch keine Bewertungen
- Apuntes de MecanismosDokument12 SeitenApuntes de MecanismosAngelPalaciosPorreroNoch keine Bewertungen
- Elementos Flexibles de Transmisión de PotenciaDokument15 SeitenElementos Flexibles de Transmisión de Potenciayojanam_Noch keine Bewertungen
- Mec 264 Apundes de Bandas o CorreasDokument21 SeitenMec 264 Apundes de Bandas o CorreasSaid PeraltaNoch keine Bewertungen
- El Diseño Del Árbol Propulsor, La Velocidad Y Los Ángulos en OperaciónDokument11 SeitenEl Diseño Del Árbol Propulsor, La Velocidad Y Los Ángulos en OperaciónFERNANDO INOCENTE TRINIDAD GUERRANoch keine Bewertungen
- Portafolio Unidad 3 (TRANSMISIÓN DE POTENCIA ENTRE BOMBA Y MOTOR PARA BOMBEO DE LODO)Dokument23 SeitenPortafolio Unidad 3 (TRANSMISIÓN DE POTENCIA ENTRE BOMBA Y MOTOR PARA BOMBEO DE LODO)Julio Chacón GarcíaNoch keine Bewertungen
- Transmisiones Flexibles CorreasDokument14 SeitenTransmisiones Flexibles CorreasDiego Hincapie VillaNoch keine Bewertungen
- Mecanismos CompuestosDokument13 SeitenMecanismos CompuestosJose JhimiNoch keine Bewertungen
- Transmision Por FajasDokument9 SeitenTransmision Por FajasVILLANUEVA FERNÁNDEZ BRYAN DANIELNoch keine Bewertungen
- Sistemas de TrasmicionDokument18 SeitenSistemas de TrasmicionMikestep OONoch keine Bewertungen
- Correa o Fajas de TransmisiónDokument6 SeitenCorrea o Fajas de TransmisiónROY ELVIN LOPEZ CHAVEZNoch keine Bewertungen
- TESIS - Reig Olcina, F.Dokument128 SeitenTESIS - Reig Olcina, F.nicolas jarabaNoch keine Bewertungen
- Cadenas de Rodillos-TeoriaDokument11 SeitenCadenas de Rodillos-Teoriamarcotalavera100% (1)
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaVon EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaNoch keine Bewertungen
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 5 von 5 Sternen5/5 (2)
- Elementos de concreto reforzado IIVon EverandElementos de concreto reforzado IIBewertung: 5 von 5 Sternen5/5 (1)
- UF1253 - Diagnóstico de deformaciones estructuralesVon EverandUF1253 - Diagnóstico de deformaciones estructuralesNoch keine Bewertungen
- MOLDEODokument41 SeitenMOLDEOAlberto Castellanos AmadorNoch keine Bewertungen
- Problemas Tema EnergiaDokument4 SeitenProblemas Tema EnergiaAlberto Castellanos AmadorNoch keine Bewertungen
- RefrigerantesDokument21 SeitenRefrigerantesAlberto Castellanos AmadorNoch keine Bewertungen
- Guia de Inicio A La Utilización My Ecodial L v3.4Dokument38 SeitenGuia de Inicio A La Utilización My Ecodial L v3.4manuelsanmartinNoch keine Bewertungen
- Guia Muy Buena Caldera BiomasaDokument66 SeitenGuia Muy Buena Caldera BiomasaAlberto Castellanos Amador100% (1)
- Ciclos FrigoríficosDokument7 SeitenCiclos FrigoríficosAlberto Castellanos AmadorNoch keine Bewertungen
- Luces de EmergenciaDokument19 SeitenLuces de EmergenciaAlberto Castellanos AmadorNoch keine Bewertungen
- Tema 2.2 Dinamica de Mecanismos PlanosDokument0 SeitenTema 2.2 Dinamica de Mecanismos PlanosAlberto Castellanos AmadorNoch keine Bewertungen
- Trabajo Eolica Completo (Word)Dokument14 SeitenTrabajo Eolica Completo (Word)Alberto Castellanos AmadorNoch keine Bewertungen
- Guia Reeae Rd1890 e May2013 r1.1Dokument0 SeitenGuia Reeae Rd1890 e May2013 r1.1Eduardo ArpírezNoch keine Bewertungen
- Tema 2.3 MÁQUINAS CÍCLICASDokument0 SeitenTema 2.3 MÁQUINAS CÍCLICASAlberto Castellanos AmadorNoch keine Bewertungen
- Tema 3.3 Trenes de EngranajesDokument0 SeitenTema 3.3 Trenes de EngranajesAlberto Castellanos AmadorNoch keine Bewertungen
- BENIGNO-Reglamento Alumbrado ExteriorDokument83 SeitenBENIGNO-Reglamento Alumbrado ExteriorAlberto Castellanos AmadorNoch keine Bewertungen
- Tema 1.2 Sintesis de MecanismosDokument0 SeitenTema 1.2 Sintesis de MecanismosAlberto Castellanos AmadorNoch keine Bewertungen
- Tema 2.1 Cinematica de Mecanimos PlanosDokument91 SeitenTema 2.1 Cinematica de Mecanimos PlanosAlberto Castellanos AmadorNoch keine Bewertungen
- Tema 1.1 Introduccion A La Teoria de MaquinasDokument0 SeitenTema 1.1 Introduccion A La Teoria de MaquinasAlberto Castellanos AmadorNoch keine Bewertungen
- T.1 03 - 10 - 12Dokument44 SeitenT.1 03 - 10 - 12Alberto Castellanos Amador100% (1)
- Costes OffshoreDokument2 SeitenCostes OffshoreAlberto Castellanos AmadorNoch keine Bewertungen
- Fabricación de Células de SilicioDokument46 SeitenFabricación de Células de SilicioAlberto Castellanos AmadorNoch keine Bewertungen
- Proyectos de ElectronicaDokument110 SeitenProyectos de ElectronicaErick_Alexander100% (1)
- Control de Motores EléctricosDokument138 SeitenControl de Motores EléctricosNicanor_Araujo79% (19)
- Práctica EstadisticaDokument185 SeitenPráctica EstadisticaAlberto Castellanos AmadorNoch keine Bewertungen
- Exámenes de GeometríaDokument9 SeitenExámenes de GeometríaCrisóstomo Vitaliano Arias AntonioNoch keine Bewertungen
- Guia SecundariaDokument3 SeitenGuia Secundariagraciela garcia barrajasNoch keine Bewertungen
- RADICALES IDOBLES A SIMPLES Y RCIONALIZACION Algebra CEPU DRET TACNADokument7 SeitenRADICALES IDOBLES A SIMPLES Y RCIONALIZACION Algebra CEPU DRET TACNAHECTOR QUIÑONEZ (ACADEMIA HARVARD DE TACNA)Noch keine Bewertungen
- Acta de Reunión Inicio de Ciclo EscolarDokument2 SeitenActa de Reunión Inicio de Ciclo EscolarMerivi MeriviNoch keine Bewertungen
- POTENCIAS Y RAICES 6º Primaria PDFDokument5 SeitenPOTENCIAS Y RAICES 6º Primaria PDFcarmen100% (2)
- Capítulo 11 - La ParábolaDokument18 SeitenCapítulo 11 - La ParábolaDaniel PonceNoch keine Bewertungen
- Funciones Trigonometricas IDokument2 SeitenFunciones Trigonometricas Ironny condoriNoch keine Bewertungen
- Metodos Operativos de Calculo IntegralDokument128 SeitenMetodos Operativos de Calculo IntegralAnabeatriz Alonso100% (4)
- Examen Cuarta SemanaDokument3 SeitenExamen Cuarta SemanaDENNYS AVILA CABRERANoch keine Bewertungen
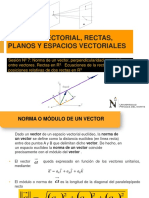
- Algebra Vectorial, Rectas, Planos Y Espacios VectorialesDokument10 SeitenAlgebra Vectorial, Rectas, Planos Y Espacios VectorialesmalcommmNoch keine Bewertungen
- Superficies CuádricasDokument10 SeitenSuperficies CuádricasDanielNoch keine Bewertungen
- Matriz Del Área de Matemática GeneralDokument51 SeitenMatriz Del Área de Matemática Generalgregorio antonio torres huayaneNoch keine Bewertungen
- Observador Primaria-1Dokument5 SeitenObservador Primaria-1Miller Fernando GamboaNoch keine Bewertungen
- 2023 - Algebra - Sumas y Restas IncompletasDokument2 Seiten2023 - Algebra - Sumas y Restas IncompletasJeanpear MendozaNoch keine Bewertungen
- Ma3002 Funciones ComplejaDokument45 SeitenMa3002 Funciones ComplejaJoaquinMiguelHocesZarateNoch keine Bewertungen
- Expanciones Con Angulos MultiplesDokument12 SeitenExpanciones Con Angulos MultipleschristianortegaNoch keine Bewertungen
- CharitoDokument2 SeitenCharitoDanielNeyraMartellNoch keine Bewertungen
- Valientes CaballerosDokument2 SeitenValientes CaballerosAlejandraramos BorsaniNoch keine Bewertungen
- 01-Bimestral - GEOMETRÍA 1eroDokument3 Seiten01-Bimestral - GEOMETRÍA 1erofreddyNoch keine Bewertungen
- Tema 13 Cuerpos Geometricos PDFDokument18 SeitenTema 13 Cuerpos Geometricos PDFAdolfo Gonzalez VidalNoch keine Bewertungen
- Area VolumenDokument3 SeitenArea VolumenLuis MaldonadoNoch keine Bewertungen
- Propiedades de La Multip.Dokument84 SeitenPropiedades de La Multip.aleyulitaNoch keine Bewertungen
- Signos de OperaciónDokument2 SeitenSignos de OperaciónAuroraigem100% (1)
- Guión de Entrevista A La Directora Del JardínDokument6 SeitenGuión de Entrevista A La Directora Del JardínKaren GomezNoch keine Bewertungen
- Propiedades MatematicasDokument2 SeitenPropiedades MatematicasCesarNoch keine Bewertungen
- Guía MiscelaneoDokument8 SeitenGuía MiscelaneoBenjamin FosterNoch keine Bewertungen
- PD Esquema de Asignaturas Grupo 5Dokument9 SeitenPD Esquema de Asignaturas Grupo 5Cristian Tapia CadmeNoch keine Bewertungen
- Primera Unidada Matematicas IDokument15 SeitenPrimera Unidada Matematicas IJose Maria SantosNoch keine Bewertungen
- '! % " (Feb 2 JulDokument18 Seiten'! % " (Feb 2 JulVictoria FlandesNoch keine Bewertungen
- Problemas 2do Corte MDFDokument13 SeitenProblemas 2do Corte MDFDiego Callán CárdenasNoch keine Bewertungen