Das könnte Ihnen auch gefallen
- Simulink HandoutDokument10 SeitenSimulink HandoutahmadNoch keine Bewertungen
- Simulink TutorialDokument12 SeitenSimulink TutorialMaRk_S_004Noch keine Bewertungen
- Introduction To Labview For Control Design and Simulation PDFDokument15 SeitenIntroduction To Labview For Control Design and Simulation PDFKunal KhandelwalNoch keine Bewertungen
- Practical Sessions 9-10Dokument28 SeitenPractical Sessions 9-10Ashwin PatelNoch keine Bewertungen
- Mem351lab MatlabSimulinkDokument13 SeitenMem351lab MatlabSimulinkebreheNoch keine Bewertungen
- Tutorial. 4 CONTROL DESIGNDokument15 SeitenTutorial. 4 CONTROL DESIGNSteve Goke AyeniNoch keine Bewertungen
- Objectives: Laboratory Assignment #1 Introduction To Xilinx Foundation Design SoftwareDokument9 SeitenObjectives: Laboratory Assignment #1 Introduction To Xilinx Foundation Design SoftwaresalNoch keine Bewertungen
- LCS Lab 2 ZynabDokument14 SeitenLCS Lab 2 ZynabZainab AshrafNoch keine Bewertungen
- LabVIEW SimulationTutorialDokument18 SeitenLabVIEW SimulationTutorialladevitaNoch keine Bewertungen
- Introduction To Matlab SimulinkDokument45 SeitenIntroduction To Matlab SimulinkSami KasawatNoch keine Bewertungen
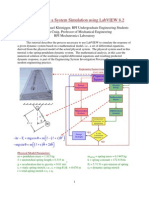
- Nonlinear Servo SimulationDokument13 SeitenNonlinear Servo Simulationgodlike110Noch keine Bewertungen
- Lab Experiment 1 (B)Dokument15 SeitenLab Experiment 1 (B)Laiba MaryamNoch keine Bewertungen
- LAB 5 and 6Dokument13 SeitenLAB 5 and 6Areeb AkhtarNoch keine Bewertungen
- Simple Exercises in Matlab/Simulink IIDokument8 SeitenSimple Exercises in Matlab/Simulink IIGarunendra BunkarNoch keine Bewertungen
- Simulink Basics TutorialDokument20 SeitenSimulink Basics TutorialEirisberto Rodrigues de MoraesNoch keine Bewertungen
- Lab 9 (Meen201101088)Dokument17 SeitenLab 9 (Meen201101088)MEEN201101056 KFUEITNoch keine Bewertungen
- Computer Applications in Engineering Design: Introductory LectureDokument35 SeitenComputer Applications in Engineering Design: Introductory Lecturezain aiNoch keine Bewertungen
- Control Systems Theory: Matlab & Simulink STB 35103Dokument23 SeitenControl Systems Theory: Matlab & Simulink STB 35103Akula Veerraju0% (1)
- Applications of MATLAB and Introduction To SimulinkDokument50 SeitenApplications of MATLAB and Introduction To SimulinkSATHISH441Noch keine Bewertungen
- Lab 1: Systems Modeling in Simulink Using Differential EquationsDokument23 SeitenLab 1: Systems Modeling in Simulink Using Differential EquationsHurrem ArifNoch keine Bewertungen
- Introduction To Matlab/Simulink ObjectivesDokument8 SeitenIntroduction To Matlab/Simulink ObjectivesFatima SaeedNoch keine Bewertungen
- TINA Tutorial: Starting UpDokument10 SeitenTINA Tutorial: Starting UpĐinh Bá ThànhNoch keine Bewertungen
- Getting Started Simulation Research: CASPOCDokument18 SeitenGetting Started Simulation Research: CASPOCKevinNoch keine Bewertungen
- Simulinkpresentation YasminDokument38 SeitenSimulinkpresentation YasminhaashillNoch keine Bewertungen
- Simulink Basics Tutorial PDFDokument44 SeitenSimulink Basics Tutorial PDFVinod WankarNoch keine Bewertungen
- Simulink To Solve ODEDokument3 SeitenSimulink To Solve ODEFaisal MasoodNoch keine Bewertungen
- Simulink & GUI in MATLAB: Experiment # 5Dokument10 SeitenSimulink & GUI in MATLAB: Experiment # 5Muhammad Ubaid Ashraf ChaudharyNoch keine Bewertungen
- Basic Simulink Tutorial 012005Dokument7 SeitenBasic Simulink Tutorial 012005Dustin WhiteNoch keine Bewertungen
- Phyc 500: Introduction To Labview Exercise 5 (V 1.0) : For LoopDokument4 SeitenPhyc 500: Introduction To Labview Exercise 5 (V 1.0) : For LoopJose Taco Jr.Noch keine Bewertungen
- Simulink Basics TutorialDokument197 SeitenSimulink Basics TutorialTanNguyễnNoch keine Bewertungen
- Lab 1: First Order CT Systems, Blockdiagrams, Intro-Duction To SimulinkDokument20 SeitenLab 1: First Order CT Systems, Blockdiagrams, Intro-Duction To SimulinkbigumangabaNoch keine Bewertungen
- Practical-01: Preprocessing: Defining The ProblemDokument18 SeitenPractical-01: Preprocessing: Defining The ProblemsandeepNoch keine Bewertungen
- Introduction To LabVIEWDokument13 SeitenIntroduction To LabVIEWKashif AmjadNoch keine Bewertungen
- LAB 02 ControlDokument20 SeitenLAB 02 Controlfiaz023Noch keine Bewertungen
- Using Simulink To Perform Open-Loop SimulationsDokument4 SeitenUsing Simulink To Perform Open-Loop SimulationsMansour AbdulazizNoch keine Bewertungen
- MOde Frontier TutorialDokument35 SeitenMOde Frontier Tutorialgurpinder.rajgarh1331Noch keine Bewertungen
- Multi Sim Tutorial 2Dokument9 SeitenMulti Sim Tutorial 2Deepesh SharmaNoch keine Bewertungen
- Introduction To Matlab - Simulink Control Systems: & Their Application inDokument13 SeitenIntroduction To Matlab - Simulink Control Systems: & Their Application inTom ArmstrongNoch keine Bewertungen
- Codevita 2013 Round 2Dokument9 SeitenCodevita 2013 Round 2sirishaNoch keine Bewertungen
- Cadence LVSDokument18 SeitenCadence LVSkjnanduNoch keine Bewertungen
- Neural Network GUI TutorialDokument11 SeitenNeural Network GUI TutorialsunnymeharwalNoch keine Bewertungen
- Simulink TutorialDokument51 SeitenSimulink TutorialAli AhmadNoch keine Bewertungen
- Simulink TutorialDokument11 SeitenSimulink TutorialshiladityNoch keine Bewertungen
- An LDmicro TutorialDokument16 SeitenAn LDmicro TutorialJuan Fco Rocha ParedesNoch keine Bewertungen
- EE-361 Feedback Control Systems Introduction To Simulink and Data Acquisition Experiment # 2Dokument23 SeitenEE-361 Feedback Control Systems Introduction To Simulink and Data Acquisition Experiment # 2Shiza ShakeelNoch keine Bewertungen
- PSSE Intro Stabilty InstructionsDokument16 SeitenPSSE Intro Stabilty InstructionsQuinn RhodesNoch keine Bewertungen
- ADS Tutorial ExerciseDokument26 SeitenADS Tutorial ExerciseJulio AltamiranoNoch keine Bewertungen
- Introduction To Using The TI-89 CalculatorDokument48 SeitenIntroduction To Using The TI-89 CalculatorIstván BenczeNoch keine Bewertungen
- Simulink ExxDokument7 SeitenSimulink ExxRajrdbNoch keine Bewertungen
- Cadence Ams - Inv3Dokument10 SeitenCadence Ams - Inv3Matthew ThomasNoch keine Bewertungen
- Exercise 2: Creating Power System Elements: Chapter DDokument14 SeitenExercise 2: Creating Power System Elements: Chapter DgjanitoNoch keine Bewertungen
- SimulinkDokument20 SeitenSimulinkEren Tutar100% (1)
- Basic Labview Examples PDFDokument16 SeitenBasic Labview Examples PDFbuiphuochuy55Noch keine Bewertungen
- L20 5nov10 LabVIEWDokument15 SeitenL20 5nov10 LabVIEWAmery MartinatNoch keine Bewertungen
- Experiment # 05 (CLO-1) Generating Signals Using Simulink: Exercise ObjectiveDokument5 SeitenExperiment # 05 (CLO-1) Generating Signals Using Simulink: Exercise ObjectiveIshtiaq AhmedNoch keine Bewertungen
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesVon EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesBewertung: 5 von 5 Sternen5/5 (1)
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Covariance and Correlation PDFDokument2 SeitenCovariance and Correlation PDFSpin FotonioNoch keine Bewertungen
- Chaos Vs RandomDokument2 SeitenChaos Vs RandomDownote ManNoch keine Bewertungen
- Deterministik Vs ProbabilistikDokument10 SeitenDeterministik Vs ProbabilistikrifayxNoch keine Bewertungen
- 16 HilbertDokument18 Seiten16 HilbertDat P NguyenNoch keine Bewertungen
- Bennett Formalism MarxismDokument111 SeitenBennett Formalism MarxismSpin FotonioNoch keine Bewertungen
- Basic Notions Infinite DimensionDokument17 SeitenBasic Notions Infinite DimensionSpin FotonioNoch keine Bewertungen
- Slide5 PT CFGDokument21 SeitenSlide5 PT CFGSpin FotonioNoch keine Bewertungen
- 214 Grammar 2014Dokument50 Seiten214 Grammar 2014Spin FotonioNoch keine Bewertungen
- SL01 IntroductionDokument10 SeitenSL01 IntroductionSpin FotonioNoch keine Bewertungen
- 1 Compiling Java Programs: InterpreterDokument16 Seiten1 Compiling Java Programs: InterpreterSpin FotonioNoch keine Bewertungen
- Imulink: Dynamic System Simulation For MATLABDokument62 SeitenImulink: Dynamic System Simulation For MATLABSpin FotonioNoch keine Bewertungen
- 214 Grammar 2014Dokument50 Seiten214 Grammar 2014Spin FotonioNoch keine Bewertungen
- Simulink IntroDokument15 SeitenSimulink IntroSpin FotonioNoch keine Bewertungen
- τ dy dt yt Kut + = τ: s u s K s yDokument2 Seitenτ dy dt yt Kut + = τ: s u s K s ySpin FotonioNoch keine Bewertungen
- Simulink Intro1Dokument12 SeitenSimulink Intro1Spin FotonioNoch keine Bewertungen
- Simulink For DSPDokument112 SeitenSimulink For DSPSpin FotonioNoch keine Bewertungen
- Simulink 2Dokument9 SeitenSimulink 2AvtomobilistNoch keine Bewertungen
- Lab02 WorksheetDokument4 SeitenLab02 WorksheetSpin FotonioNoch keine Bewertungen
- Simulink For DSPDokument112 SeitenSimulink For DSPSpin FotonioNoch keine Bewertungen
- Intro To SimulinkDokument12 SeitenIntro To SimulinkSpin FotonioNoch keine Bewertungen
- Lab07 WorksheetDokument3 SeitenLab07 WorksheetSpin FotonioNoch keine Bewertungen
- Lab 2Dokument3 SeitenLab 2Spin FotonioNoch keine Bewertungen
- FT 0025 0 Area Surface F LB BTU 11 - 0 FT LB 490 ° : Lab 7 PrelabDokument1 SeiteFT 0025 0 Area Surface F LB BTU 11 - 0 FT LB 490 ° : Lab 7 PrelabSpin FotonioNoch keine Bewertungen
- Lab01 Get Start SimulinkDokument22 SeitenLab01 Get Start SimulinkSpin FotonioNoch keine Bewertungen
- 6 WirelessDokument61 Seiten6 WirelessNayeli HernándezNoch keine Bewertungen
- Lab02 TutorialDokument18 SeitenLab02 TutorialSpin FotonioNoch keine Bewertungen
- Lab02 WorksheetDokument4 SeitenLab02 WorksheetSpin FotonioNoch keine Bewertungen
- Math Theory Comm SH Ann OnDokument45 SeitenMath Theory Comm SH Ann OnbammoaNoch keine Bewertungen
- FitdistrplusDokument87 SeitenFitdistrplusPedro Humberto Almeida GonzagaNoch keine Bewertungen
- Computational Fluid Dynamics-Vol1Dokument500 SeitenComputational Fluid Dynamics-Vol1engma3Noch keine Bewertungen
- FEA Question BankDokument6 SeitenFEA Question Bankmenmoli2012Noch keine Bewertungen
- 48.3 Events and The Union and Intersection of Events#Dokument4 Seiten48.3 Events and The Union and Intersection of Events#Paulo EsguerraNoch keine Bewertungen
- Machine Model GENQECDokument9 SeitenMachine Model GENQECManuelNoch keine Bewertungen
- G52lac Notes 2up PDFDokument84 SeitenG52lac Notes 2up PDFBaponNoch keine Bewertungen
- ACFrOgAO2L 2xe8B7718oECzneMqcI2HFMd2y3CLjH3JPGnQWD e8F30Pd NzUHQC4XdLaKTuL oHq-HE8IRnhsJrqTZ1yZGmLa4JL8HOcFhBggFAx4AeLyE0o5al0wDokument162 SeitenACFrOgAO2L 2xe8B7718oECzneMqcI2HFMd2y3CLjH3JPGnQWD e8F30Pd NzUHQC4XdLaKTuL oHq-HE8IRnhsJrqTZ1yZGmLa4JL8HOcFhBggFAx4AeLyE0o5al0wgesNoch keine Bewertungen
- Partially Directed Graphs and Conditional Random Fields: Sargur Srihari Srihari@cedar - Buffalo.eduDokument43 SeitenPartially Directed Graphs and Conditional Random Fields: Sargur Srihari Srihari@cedar - Buffalo.eduSai SwaroopNoch keine Bewertungen
- Advanced Derivatives PricingDokument561 SeitenAdvanced Derivatives PricingXincheng Cai100% (1)
- July 1993 - The Alpha-Beta FilterDokument8 SeitenJuly 1993 - The Alpha-Beta FilterSamuele TesfayeNoch keine Bewertungen
- Final Synopsis Neetu GuptaDokument25 SeitenFinal Synopsis Neetu Guptanarendrakum16Noch keine Bewertungen
- STAT 342 Statistical Methods For Engineers: Homework#01Dokument2 SeitenSTAT 342 Statistical Methods For Engineers: Homework#01HamzaBaigNoch keine Bewertungen
- Poisson Random Variables: Scott She EldDokument15 SeitenPoisson Random Variables: Scott She EldzahiruddinNoch keine Bewertungen
- 03b 1MA1 3F June 2022 Examination Paper (Word) 2Dokument20 Seiten03b 1MA1 3F June 2022 Examination Paper (Word) 2iqraa8148Noch keine Bewertungen
- Aquasim TutorialDokument218 SeitenAquasim TutorialKeshab SharmaNoch keine Bewertungen
- Exterior Angles-Answer KeyDokument1 SeiteExterior Angles-Answer KeyWalaa MagdyNoch keine Bewertungen
- Syllabus MAT235Dokument4 SeitenSyllabus MAT235Allen LiNoch keine Bewertungen
- Course NotesDokument31 SeitenCourse Notestesting543Noch keine Bewertungen
- Logical EquivalenceDokument21 SeitenLogical EquivalenceTHe Study HallNoch keine Bewertungen
- Homework #6, Sec 11.4 and 12.1Dokument7 SeitenHomework #6, Sec 11.4 and 12.1Masaya Sato100% (1)
- Computer Graphics Anna University Local AuthorDokument173 SeitenComputer Graphics Anna University Local AuthorArunsankar MuralitharanNoch keine Bewertungen
- Microprocessors: 8-Bit 2's Complement CalculatorDokument11 SeitenMicroprocessors: 8-Bit 2's Complement CalculatorRaj Daniel MagnoNoch keine Bewertungen
- (De Gruyer Studies in Mathematical Physics) Anna G. Chunovkina, Leonid A. Mironovsky, Valery A. Slaev-Metrology and Theory of Measurement-De Gruyter (2013)Dokument585 Seiten(De Gruyer Studies in Mathematical Physics) Anna G. Chunovkina, Leonid A. Mironovsky, Valery A. Slaev-Metrology and Theory of Measurement-De Gruyter (2013)Govinda Prasad DhunganaNoch keine Bewertungen
- Rational and Radical Function - Domain and Range PDFDokument9 SeitenRational and Radical Function - Domain and Range PDFNystea MagdayaoNoch keine Bewertungen
- Boards Subjective Assignment 1 Determinants-1Dokument2 SeitenBoards Subjective Assignment 1 Determinants-1fortrial197Noch keine Bewertungen
- Mathematics: Quarter 1 - Module 9Dokument33 SeitenMathematics: Quarter 1 - Module 9Denmark Santos75% (4)
- Dental Hygiene Portfolio GuideDokument12 SeitenDental Hygiene Portfolio GuideMostafa FayadNoch keine Bewertungen
- Notes Important Questions Answers of 11th Math Chapter 7 Excercise 7.2Dokument5 SeitenNotes Important Questions Answers of 11th Math Chapter 7 Excercise 7.2shahidNoch keine Bewertungen
- TechnometricsDokument14 SeitenTechnometricsGHULAM MURTAZANoch keine Bewertungen
- Geometric TolerancesDokument23 SeitenGeometric TolerancesSameer shaikhNoch keine Bewertungen