Das könnte Ihnen auch gefallen
- Magnetic Balance and Magnetising Excitation Current Test A Effective Diagnostic ToolDokument13 SeitenMagnetic Balance and Magnetising Excitation Current Test A Effective Diagnostic Toolsree rama chandra murthy channa50% (2)
- HP G94aDokument48 SeitenHP G94aJhon Kelvin GerónimoNoch keine Bewertungen
- Dgdlinfineon BTT6010 1ERA DS v01 00 en - Pdffileid #Page11Dokument46 SeitenDgdlinfineon BTT6010 1ERA DS v01 00 en - Pdffileid #Page11muhammetNoch keine Bewertungen
- Gate DriverDokument27 SeitenGate DriverRajasekaranViswaNoch keine Bewertungen
- Optimizing Efficiency of Switching Mode Chargers: Multi-Cell Battery Charge Management (MBCM)Dokument27 SeitenOptimizing Efficiency of Switching Mode Chargers: Multi-Cell Battery Charge Management (MBCM)mbozhoNoch keine Bewertungen
- BA823Dokument7 SeitenBA823BanyugeaNoch keine Bewertungen
- BJT TransistorDokument52 SeitenBJT Transistoralia shahiraNoch keine Bewertungen
- For New Designs: SSC9522S Data SheetDokument21 SeitenFor New Designs: SSC9522S Data Sheetfalla naNoch keine Bewertungen
- Modeling and Simulation of Buck-Boost Converter With Voltage Feedback ControlDokument5 SeitenModeling and Simulation of Buck-Boost Converter With Voltage Feedback Controlsambit dasNoch keine Bewertungen
- 07 GTO - IGBT - ConvertersDokument136 Seiten07 GTO - IGBT - Convertersriajul100% (1)
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Dokument8 SeitenObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)dz info tech2techNoch keine Bewertungen
- User's Guide: UCC2541 72-W Synchronous Buck ConverterDokument22 SeitenUser's Guide: UCC2541 72-W Synchronous Buck ConverterNeslyn BocioNoch keine Bewertungen
- MJD340 (NPN), MJD350 (PNP) High Voltage Power Transistors: DPAK For Surface Mount ApplicationsDokument8 SeitenMJD340 (NPN), MJD350 (PNP) High Voltage Power Transistors: DPAK For Surface Mount Applicationshalil ibrahim soysalNoch keine Bewertungen
- DC DC ConvertersDokument22 SeitenDC DC ConvertersAnonymous UJs2uePNoch keine Bewertungen
- IRFB3307 IRFS3307 IRFSL3307: V 75V R Typ. 5.0m Max. 6.3m I 130ADokument12 SeitenIRFB3307 IRFS3307 IRFSL3307: V 75V R Typ. 5.0m Max. 6.3m I 130AAlceu DluzniewskiNoch keine Bewertungen
- New DC/DC Converter For Space ApplicationsDokument37 SeitenNew DC/DC Converter For Space ApplicationsLeonard GržetićNoch keine Bewertungen
- 40N03 36a 30v N-Channel Mosfet TransistorDokument5 Seiten40N03 36a 30v N-Channel Mosfet TransistorYasir FaurNoch keine Bewertungen
- Afgy120t65spd B4Dokument11 SeitenAfgy120t65spd B4RaduNoch keine Bewertungen
- 23NM60ND STMicroelectronicsDokument12 Seiten23NM60ND STMicroelectronicskeisinhoNoch keine Bewertungen
- Pdiol 2008dec24 Supply An 01Dokument3 SeitenPdiol 2008dec24 Supply An 01Roberto De Mesa PNoch keine Bewertungen
- Shenzhen Hifibercom Technology Co.,Ltd 10G Bidi 20km Optical ModuleDokument8 SeitenShenzhen Hifibercom Technology Co.,Ltd 10G Bidi 20km Optical Modulehifibercom comNoch keine Bewertungen
- MDF7N60BDokument8 SeitenMDF7N60BFreddyNoch keine Bewertungen
- Tda 7296 PDFDokument14 SeitenTda 7296 PDFNenea IonutNoch keine Bewertungen
- NCP1606 Cost Effective Power Factor Controller: Marking DiagramsDokument22 SeitenNCP1606 Cost Effective Power Factor Controller: Marking DiagramsVanessa FumesNoch keine Bewertungen
- STPS20H100CT/CF/CG/CG-1: High Voltage Power Schottky RectifierDokument7 SeitenSTPS20H100CT/CF/CG/CG-1: High Voltage Power Schottky RectifierVicente MiróNoch keine Bewertungen
- Fcp190N60 / Fcpf190N60: N-Channel Superfet Ii MosfetDokument10 SeitenFcp190N60 / Fcpf190N60: N-Channel Superfet Ii Mosfetarness22Noch keine Bewertungen
- VN In: StartDokument5 SeitenVN In: StartPrateek TripathiNoch keine Bewertungen
- CH 13Dokument30 SeitenCH 13Malik BilalNoch keine Bewertungen
- Basic Electronics by Bakshi PDFDokument226 SeitenBasic Electronics by Bakshi PDFnijuNoch keine Bewertungen
- 2.transistor ModellingDokument31 Seiten2.transistor ModellingRohit KumarNoch keine Bewertungen
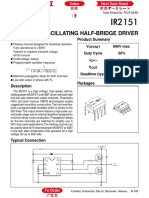
- Self-Oscillating Half-Bridge Driver: Features Product SummaryDokument6 SeitenSelf-Oscillating Half-Bridge Driver: Features Product SummaryJean AlvesNoch keine Bewertungen
- NDC96 NDC 96 24-75VDC 1.9-6.0a Stepping Motor Drive Boxed Rta Pavia ManualDokument9 SeitenNDC96 NDC 96 24-75VDC 1.9-6.0a Stepping Motor Drive Boxed Rta Pavia Manualrenato vitaliNoch keine Bewertungen
- General Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosDokument8 SeitenGeneral Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosCastro G. LombanaNoch keine Bewertungen
- High Step Up ConvertersDokument100 SeitenHigh Step Up ConvertersRakesh SandarativjuNoch keine Bewertungen
- P F E T: General Description FeaturesDokument4 SeitenP F E T: General Description Featuresrezha jonNoch keine Bewertungen
- MJD32C: 100V PNP High Voltage Transistor in To252Dokument7 SeitenMJD32C: 100V PNP High Voltage Transistor in To252Mihajlo Morgan KucinaNoch keine Bewertungen
- Isolated DC-DC Converters: Chapter TwoDokument12 SeitenIsolated DC-DC Converters: Chapter TwoMarko SvalinaNoch keine Bewertungen
- 10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Dokument11 Seiten10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Владислав РусинNoch keine Bewertungen
- 10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Dokument11 Seiten10-Channel Scan Driver For TFT LCD With GPM Function MAX17119Владислав РусинNoch keine Bewertungen
- 4.2 Current Bidirectional Switches PDFDokument7 Seiten4.2 Current Bidirectional Switches PDFJahangeer SoomroNoch keine Bewertungen
- FCP104N60 D-2312015Dokument11 SeitenFCP104N60 D-2312015Electronica Analogica Y DigitalNoch keine Bewertungen
- Vector Control Inverter: SeriesDokument8 SeitenVector Control Inverter: SeriesEdin MahmutagicNoch keine Bewertungen
- ZXTN2031FDokument7 SeitenZXTN2031FHuu NguyenNoch keine Bewertungen
- Design and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irDokument5 SeitenDesign and Implementation of Type II Compensator in DC DC Switch Mode Step Up Power Supply WWW - Iranswitching.irseyed mohsen SalehiNoch keine Bewertungen
- SMPSDokument46 SeitenSMPSNimsiri AbhayasingheNoch keine Bewertungen
- Ir2175 (S) & (PBF) : Linear Current Sensing IcDokument7 SeitenIr2175 (S) & (PBF) : Linear Current Sensing IcDavid CoronadoNoch keine Bewertungen
- Telefono l3240b Twotone RingerDokument6 SeitenTelefono l3240b Twotone Ringerblackbeast79Noch keine Bewertungen
- AD7811/AD7812: Parameter Y Version Units Test Conditions/CommentsDokument1 SeiteAD7811/AD7812: Parameter Y Version Units Test Conditions/CommentsAntonio HerreraNoch keine Bewertungen
- 5.DC-DC Converters (Part 2)Dokument35 Seiten5.DC-DC Converters (Part 2)dwiaguspurwantoNoch keine Bewertungen
- 04 Power SCD 2Dokument82 Seiten04 Power SCD 2riajulNoch keine Bewertungen
- DC-DC Converter - AllDokument99 SeitenDC-DC Converter - AllAijaz HussainNoch keine Bewertungen
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDokument74 SeitenChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhNoch keine Bewertungen
- Automotive Power Relay: Technical Data For Contact SideDokument3 SeitenAutomotive Power Relay: Technical Data For Contact SideRakesh SutharNoch keine Bewertungen
- Automotive Power Relay: Technical Data For Contact SideDokument3 SeitenAutomotive Power Relay: Technical Data For Contact SideRakesh SutharNoch keine Bewertungen
- Abb Flyer Igct 2015Dokument2 SeitenAbb Flyer Igct 2015Dhruv PatelNoch keine Bewertungen
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Dokument8 SeitenObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Ryn YahuFNoch keine Bewertungen
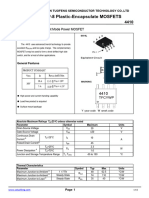
- SOP-8 Plastic-Encapsulate MOSFETS: N-Channel Enhancement Mode Power MOSFETDokument5 SeitenSOP-8 Plastic-Encapsulate MOSFETS: N-Channel Enhancement Mode Power MOSFETmuzaffarfarhan79Noch keine Bewertungen
- FJA13009 (Similar A J5804-Corrente Do j5804 10A) PDFDokument6 SeitenFJA13009 (Similar A J5804-Corrente Do j5804 10A) PDFhenriquegonferNoch keine Bewertungen
- Advanced Power Electronics Corp.: DescriptionDokument7 SeitenAdvanced Power Electronics Corp.: DescriptionDaiver JuarezNoch keine Bewertungen
- NCP1606 Cost Effective Power Factor Controller: Marking DiagramsDokument22 SeitenNCP1606 Cost Effective Power Factor Controller: Marking DiagramsIvan Alberto Pinituj GarciaNoch keine Bewertungen
- Self-Oscillating Half-Bridge Driver: Features Product SummaryDokument6 SeitenSelf-Oscillating Half-Bridge Driver: Features Product SummaryРуслан ЕгоровNoch keine Bewertungen
- PWM Fan ControllerDokument5 SeitenPWM Fan ControlleranandNoch keine Bewertungen
- Irf2110 AplicationDokument30 SeitenIrf2110 Aplicationanand100% (1)
- Diode Bridge Rectifier CapacitorDokument15 SeitenDiode Bridge Rectifier Capacitoranand100% (1)
- Sensor Less Control of The BLDC MotorsDokument20 SeitenSensor Less Control of The BLDC Motorsanand100% (1)
- Reading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationDokument24 SeitenReading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationanandNoch keine Bewertungen
- "Light Fidelity (Li - Fi) ": MIC College of TechnologyDokument20 Seiten"Light Fidelity (Li - Fi) ": MIC College of Technology4B0 UJJWALNoch keine Bewertungen
- Str-W625xseries An enDokument17 SeitenStr-W625xseries An encjtrybiec0% (1)
- Sambhram Institute of Techhnology Vlsi Lab - 06ecl77 Viva Voce QuestionsDokument2 SeitenSambhram Institute of Techhnology Vlsi Lab - 06ecl77 Viva Voce QuestionsAbhay Shankar BharadwajNoch keine Bewertungen
- Proview PZ456 LCD Service ManualDokument25 SeitenProview PZ456 LCD Service ManualZoran KovacevicNoch keine Bewertungen
- International Ejournals: Issn 0976 - 1411Dokument5 SeitenInternational Ejournals: Issn 0976 - 1411Jay RajNoch keine Bewertungen
- 5kw Inverter Efficiency An eDokument21 Seiten5kw Inverter Efficiency An eguarilhaeduNoch keine Bewertungen
- Riparazione EcmDokument17 SeitenRiparazione Ecmjalvarez_385073Noch keine Bewertungen
- Tender Dry Type TransDokument19 SeitenTender Dry Type Transdk010784Noch keine Bewertungen
- Standard CellDokument133 SeitenStandard CellSon Quang LeNoch keine Bewertungen
- Semiconductor 2N3904: Technical DataDokument4 SeitenSemiconductor 2N3904: Technical Datanamartinez26Noch keine Bewertungen
- Toshiba TH58NVG4D4CTG00 SAR-0605-801 TOCDokument8 SeitenToshiba TH58NVG4D4CTG00 SAR-0605-801 TOCmiloud1911Noch keine Bewertungen
- One ShotDokument14 SeitenOne ShotDiego LeivaNoch keine Bewertungen
- Yx 360 TRDokument14 SeitenYx 360 TRNovian ArmaNoch keine Bewertungen
- Strong Fet Irfs7437-7Ppbf: V 40V R Typ. 1.1Mω Max. 1.4M I 295A I 195ADokument11 SeitenStrong Fet Irfs7437-7Ppbf: V 40V R Typ. 1.1Mω Max. 1.4M I 295A I 195AAriel Rodrigo MuñozNoch keine Bewertungen
- Revised Full Wave RectifierDokument28 SeitenRevised Full Wave RectifierSiddhartha SatyakamaNoch keine Bewertungen
- Poster Template PortraitDokument1 SeitePoster Template PortraitTuanito NguyenNoch keine Bewertungen
- ACDCPDokument14 SeitenACDCPCesar DomenechNoch keine Bewertungen
- Nmos 128K (16K X 8) Uv Eprom: Figure 1. Logic Diagram DescriptionDokument11 SeitenNmos 128K (16K X 8) Uv Eprom: Figure 1. Logic Diagram DescriptionJosepe Franco GerentNoch keine Bewertungen
- Vlsi Physical Design PDFDokument41 SeitenVlsi Physical Design PDFParul TrivediNoch keine Bewertungen
- (PC Repack) BioShock - The Collection - Black Box - BioShock 1 + 2 Remastered - PCGames-Download PDFDokument14 Seiten(PC Repack) BioShock - The Collection - Black Box - BioShock 1 + 2 Remastered - PCGames-Download PDFRizkySchifferNoch keine Bewertungen
- E8 & E9Dokument4 SeitenE8 & E9hatemh82Noch keine Bewertungen
- Directed 750d - User ManualDokument20 SeitenDirected 750d - User ManualAlina CarazaNoch keine Bewertungen
- TM1651 V1.1 enDokument12 SeitenTM1651 V1.1 enPriyanka ShanmugamNoch keine Bewertungen
- Unit 4 Semiconductor Physics-Edited PDFDokument57 SeitenUnit 4 Semiconductor Physics-Edited PDFMUSICAL MASTI RINGTONENoch keine Bewertungen
- Product/Process Change Notice (PCNDokument2 SeitenProduct/Process Change Notice (PCNJoseph BernardNoch keine Bewertungen
- Caddy Arc 150i 2Dokument8 SeitenCaddy Arc 150i 2Helder NascimentoNoch keine Bewertungen
- Tda8580j DatasheetDokument28 SeitenTda8580j DatasheetSandeep KaushikNoch keine Bewertungen