Das könnte Ihnen auch gefallen
- Simulation of a Gas Tungsten Arc Welding Process in COMSOLDokument1 SeiteSimulation of a Gas Tungsten Arc Welding Process in COMSOLzhushazangNoch keine Bewertungen
- Linear Programming-Wolfram Mathematica 9 ..Dokument15 SeitenLinear Programming-Wolfram Mathematica 9 ..zhushazangNoch keine Bewertungen
- FAZ VM Install 40 Mr2Dokument20 SeitenFAZ VM Install 40 Mr2Jorge CasaliNoch keine Bewertungen
- TP Link Wr641gDokument84 SeitenTP Link Wr641gZoe SpencerNoch keine Bewertungen
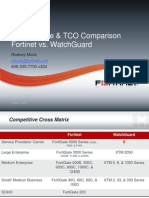
- Competitive Analysis - Fortinet Vs WatchGuard Performance and TCODokument16 SeitenCompetitive Analysis - Fortinet Vs WatchGuard Performance and TCOzhushazang100% (1)
- Cli Cli Cli - Cli CliDokument2 SeitenCli Cli Cli - Cli ClizhushazangNoch keine Bewertungen
- 7 HabitsDokument10 Seiten7 HabitszhushazangNoch keine Bewertungen
- Microsoft Malware Protection Center Threat Report: RootkitsDokument16 SeitenMicrosoft Malware Protection Center Threat Report: RootkitsMSFTSIRNoch keine Bewertungen
- CUDA C Programming GuideDokument187 SeitenCUDA C Programming GuideaelhaddadNoch keine Bewertungen
- 700series Installing Peripherals B2355-90041 345pages Aug92Dokument345 Seiten700series Installing Peripherals B2355-90041 345pages Aug92zhushazangNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Griffiths Consistent Quantum TheoryDokument407 SeitenGriffiths Consistent Quantum TheoryVala Stola100% (5)
- A Finite Element Formulation For Nonlinear Incompressible Elastic and Inelastic AnalysisDokument53 SeitenA Finite Element Formulation For Nonlinear Incompressible Elastic and Inelastic Analysisguanicad712827Noch keine Bewertungen
- Warm-Up Codlets: Bur.f: Burgers Equation KPZ.F: KPZ Equation Sand.f: Sandpile ModelDokument20 SeitenWarm-Up Codlets: Bur.f: Burgers Equation KPZ.F: KPZ Equation Sand.f: Sandpile ModeljahidNoch keine Bewertungen
- 424 Handout22 Filters4 LectureNotesDokument29 Seiten424 Handout22 Filters4 LectureNotesyashyg6Noch keine Bewertungen
- 9709 Mathematics Paper1 ECR v1Dokument54 Seiten9709 Mathematics Paper1 ECR v1koeliaNoch keine Bewertungen
- SRM Institute of Science and Technology: 18Mee305T - Finite Element MethodDokument15 SeitenSRM Institute of Science and Technology: 18Mee305T - Finite Element MethodjumkalakaNoch keine Bewertungen
- Basic College Mathematics An Applied Approach 9th Edition Aufmann Solutions Manual 1Dokument89 SeitenBasic College Mathematics An Applied Approach 9th Edition Aufmann Solutions Manual 1james100% (36)
- Algebra 01 - TestDokument2 SeitenAlgebra 01 - Testaayusshmaan singhNoch keine Bewertungen
- Pre-Calculus Quarter 1 - Module 4: Ellipses and HyperbolasDokument19 SeitenPre-Calculus Quarter 1 - Module 4: Ellipses and HyperbolasAbby Gayle Nacino0% (1)
- Tests For Convergence TableDokument2 SeitenTests For Convergence TableCamden KrupalaNoch keine Bewertungen
- Calculation of Phase Envelopes and Critical Points For Multicomponent MixturesDokument10 SeitenCalculation of Phase Envelopes and Critical Points For Multicomponent Mixturesflavio_cordero_1Noch keine Bewertungen
- Exercise On Base and Derived QuantitiesDokument5 SeitenExercise On Base and Derived QuantitiesNong HmNoch keine Bewertungen
- Stresses Around Underground ExcavationsDokument101 SeitenStresses Around Underground ExcavationsKerim Aydiner100% (1)
- CSEC Add Maths 2023 June Past Paper SolutionsDokument26 SeitenCSEC Add Maths 2023 June Past Paper SolutionsAnu RNoch keine Bewertungen
- Lossy Circular WaveguideDokument6 SeitenLossy Circular WaveguideParas KumarNoch keine Bewertungen
- WumpsDokument6 SeitenWumpslouterbridge20700% (3)
- CHAPTER 3 Transportatiofor Night ClassDokument10 SeitenCHAPTER 3 Transportatiofor Night ClassHACHALU FAYE100% (1)
- Periodical Exam Math 7Dokument2 SeitenPeriodical Exam Math 7laarni malata95% (19)
- Aiml DocxDokument11 SeitenAiml DocxWbn tournamentsNoch keine Bewertungen
- An active angle stability circuit reference for power line resistanceDokument9 SeitenAn active angle stability circuit reference for power line resistanceRebeca VargasNoch keine Bewertungen
- Lec 11Dokument17 SeitenLec 11Fardin Jamal FayeedNoch keine Bewertungen
- 1.discuss The Frequency Domain Techniques of Image Enhancement in DetailDokument19 Seiten1.discuss The Frequency Domain Techniques of Image Enhancement in DetailDinesh PalavalasaNoch keine Bewertungen
- MATLAB Manuals for Chemical EngineeringDokument123 SeitenMATLAB Manuals for Chemical EngineeringKashaf TehreemNoch keine Bewertungen
- MS++System ModelsDokument49 SeitenMS++System ModelsAndreaNoch keine Bewertungen
- Exercises Solutions TumorsDokument32 SeitenExercises Solutions TumorsElio EduardoNoch keine Bewertungen
- Multiplicity Results For Generalized Mean Curvature OperatorDokument6 SeitenMultiplicity Results For Generalized Mean Curvature Operatorcristi7sNoch keine Bewertungen
- Jehle and Reny SolutionsDokument33 SeitenJehle and Reny SolutionsKevin Andrew80% (10)
- Alexander Graham - Kronecker Products and Matrix CDokument128 SeitenAlexander Graham - Kronecker Products and Matrix CSat KoosNoch keine Bewertungen
- W. F. Chen, Plasticity For Structural Engineers, 1988-70Dokument1 SeiteW. F. Chen, Plasticity For Structural Engineers, 1988-70ahmed shakerNoch keine Bewertungen