Das könnte Ihnen auch gefallen
- Valdamar Valerian - Matrix IVDokument1.098 SeitenValdamar Valerian - Matrix IVpeterspm100% (11)
- Timewave ZeroDokument6 SeitenTimewave ZeronikoknezNoch keine Bewertungen
- The Antigod PDFDokument1.000 SeitenThe Antigod PDFTeodor CimpocaNoch keine Bewertungen
- The Apparition of The I PDFDokument5 SeitenThe Apparition of The I PDFBoagiu RăzvanNoch keine Bewertungen
- A Quantum StoryDokument15 SeitenA Quantum StoryTeodor CimpocaNoch keine Bewertungen
- What Is The Value of SQRT (1)Dokument8 SeitenWhat Is The Value of SQRT (1)cimpocteNoch keine Bewertungen
- Advanced Aerial Devices - Richard HainesDokument79 SeitenAdvanced Aerial Devices - Richard Hainesmarcelobaires.20071890Noch keine Bewertungen
- Planetx and The Kolbrin Bible Connection PDFDokument97 SeitenPlanetx and The Kolbrin Bible Connection PDFTeodor Cimpoca100% (2)
- The Code To The Matrix - Silver EditionDokument221 SeitenThe Code To The Matrix - Silver EditionSevan Bomar94% (71)
- Jenny Randles - Mind Monsters - Invaders From Inner Space (1990)Dokument219 SeitenJenny Randles - Mind Monsters - Invaders From Inner Space (1990)DirkTheDaring11100% (15)
- Army After Next PDFDokument47 SeitenArmy After Next PDFTeodor CimpocaNoch keine Bewertungen
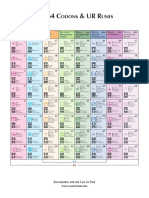
- 64 Codons RunesDokument1 Seite64 Codons RunesTeodor CimpocaNoch keine Bewertungen
- The Evolution of Matter PDFDokument478 SeitenThe Evolution of Matter PDFTeodor CimpocaNoch keine Bewertungen
- Can I Smoke Aboard A Flying SaucerDokument26 SeitenCan I Smoke Aboard A Flying Saucerreymreym100% (4)
- "GroomLake'Colonel'Reveals'All" MAGVID (Annotated)Dokument19 Seiten"GroomLake'Colonel'Reveals'All" MAGVID (Annotated)mathias455Noch keine Bewertungen
- Walter Russell - A New Concept of The UniverseDokument98 SeitenWalter Russell - A New Concept of The Universefredtyler9100% (1)
- The 216 Letter Sacred Hidden Name of GodDokument40 SeitenThe 216 Letter Sacred Hidden Name of GodTeodor Cimpoca100% (1)
- What Is The Value of SQRT 1Dokument3 SeitenWhat Is The Value of SQRT 1Teodor CimpocaNoch keine Bewertungen
- The Lie NASA Told - The Imminent Demise of The NWO PDFDokument98 SeitenThe Lie NASA Told - The Imminent Demise of The NWO PDFSue Rhoades93% (29)
- Floyd Sweet's Space Quanta Modulator-Floyd Sweet's VTA - by HyiqDokument21 SeitenFloyd Sweet's Space Quanta Modulator-Floyd Sweet's VTA - by Hyiqbreyx50% (2)
- The Forbidden Legacy of The GodsDokument316 SeitenThe Forbidden Legacy of The GodsTeodor Cimpoca100% (1)
- The Chani ProjectDokument9 SeitenThe Chani ProjectMrYabangNoch keine Bewertungen
- Children of The HarvestDokument268 SeitenChildren of The HarvestTeodor CimpocaNoch keine Bewertungen
- The Code To The Matrix - FinalDokument231 SeitenThe Code To The Matrix - FinalSevan Bomar96% (310)
- Alien MindDokument239 SeitenAlien Mindrichx7Noch keine Bewertungen
- Time Loop 1Dokument318 SeitenTime Loop 1Teodor CimpocaNoch keine Bewertungen
- 2-d Nature of Spin Another Fine DetailDokument20 Seiten2-d Nature of Spin Another Fine DetailTeodor CimpocaNoch keine Bewertungen
- The Origin of Life-5Dokument14 SeitenThe Origin of Life-5Rick KenyonNoch keine Bewertungen
- Anurag Sagar by Kabir - Ocean of LoveDokument720 SeitenAnurag Sagar by Kabir - Ocean of LoveKirpal_Singh_Mission_in_His_Name90% (21)
- The Lie NASA Told - The Imminent Demise of The NWO PDFDokument98 SeitenThe Lie NASA Told - The Imminent Demise of The NWO PDFSue Rhoades93% (29)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Thermostats: Selco / " Disc Thermostats Automatic Reset Selco / " Disc High Temperature ThermostatDokument1 SeiteThermostats: Selco / " Disc Thermostats Automatic Reset Selco / " Disc High Temperature ThermostatycnNoch keine Bewertungen
- SSV Bourbon Seismic Support Vessel 0Dokument2 SeitenSSV Bourbon Seismic Support Vessel 0Aladin SharawyNoch keine Bewertungen
- Hi-7 and Hi-8 Race Ignition Systems: Battery ConsiderationsDokument8 SeitenHi-7 and Hi-8 Race Ignition Systems: Battery ConsiderationssphinxxxxNoch keine Bewertungen
- Three Phase Semi Controlled RectifierDokument12 SeitenThree Phase Semi Controlled RectifierSvk NareshNoch keine Bewertungen
- 1 Copert MainDokument18 Seiten1 Copert MaindpmgumtiNoch keine Bewertungen
- Astm D5797Dokument2 SeitenAstm D5797Jose RacancojNoch keine Bewertungen
- Naya Raipur': A New City Takes RootDokument34 SeitenNaya Raipur': A New City Takes Rootrevati chandakNoch keine Bewertungen
- Cell Emf Under Nonstandard Conditions Lecture 3Dokument3 SeitenCell Emf Under Nonstandard Conditions Lecture 3Lyra GurimbaoNoch keine Bewertungen
- Inkohärente Lichtquellen: Christian WenningDokument15 SeitenInkohärente Lichtquellen: Christian Wenningkummetha vanithaNoch keine Bewertungen
- Physics Full Book TestDokument3 SeitenPhysics Full Book TestLearnEnglish WithAriNoch keine Bewertungen
- RA Series-Installation & Connection Manual Arc WeldingDokument48 SeitenRA Series-Installation & Connection Manual Arc WeldingsunhuynhNoch keine Bewertungen
- VW Oil SpecDokument18 SeitenVW Oil Specjpsum161100% (2)
- FSD101eng FSG Seals Catalog A4Dokument64 SeitenFSD101eng FSG Seals Catalog A4ASHOKNoch keine Bewertungen
- Data Sheet - KM01Dokument4 SeitenData Sheet - KM01Jose Manuel Carcamo SaezNoch keine Bewertungen
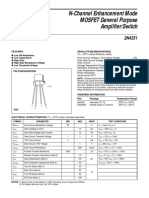
- EMOSFET Nchannel 2N4351Dokument1 SeiteEMOSFET Nchannel 2N4351Pradina Kiky WasibagnoNoch keine Bewertungen
- PID-signs and Symbols - Rev2Dokument1 SeitePID-signs and Symbols - Rev2Vũ QuangNoch keine Bewertungen
- Acid Plan in General Physics 1Dokument5 SeitenAcid Plan in General Physics 1Edralyn PamaniNoch keine Bewertungen
- Dhaka Imarat Nirman Bidhimala-2008Dokument142 SeitenDhaka Imarat Nirman Bidhimala-2008sazeda67% (3)
- Technical Data: @perkinsDokument8 SeitenTechnical Data: @perkinsdfheardNoch keine Bewertungen
- Instrumentation-Cables 1.5SQMM 6P 300-500-V Copper Stranded Pvc-Type-A Overall-Al-Mylar PVC-ST1 Gi-Wire FRLSH TDSDokument2 SeitenInstrumentation-Cables 1.5SQMM 6P 300-500-V Copper Stranded Pvc-Type-A Overall-Al-Mylar PVC-ST1 Gi-Wire FRLSH TDShydrothermsNoch keine Bewertungen
- Energizer 522: Product DatasheetDokument1 SeiteEnergizer 522: Product DatasheetAli AbdullahNoch keine Bewertungen
- Essar Shipping ProjectDokument78 SeitenEssar Shipping ProjectvkkothariNoch keine Bewertungen
- Instruction Manual Model 175 Autoranging MultimeterDokument67 SeitenInstruction Manual Model 175 Autoranging Multimetervmilano1Noch keine Bewertungen
- Concept PaperDokument7 SeitenConcept PaperAejay MacasaNoch keine Bewertungen
- 2800 Series: 2806C-E16TAG2Dokument2 Seiten2800 Series: 2806C-E16TAG2Tony LiNoch keine Bewertungen
- Power Cable Life SpanDokument9 SeitenPower Cable Life SpanSing Yew LamNoch keine Bewertungen
- Keitai LED Catalogue 2011-2012Dokument85 SeitenKeitai LED Catalogue 2011-2012Adam McConnellNoch keine Bewertungen
- ISC Physics Sample Paper 1Dokument9 SeitenISC Physics Sample Paper 1amit77999Noch keine Bewertungen
- Lecture08 160425Dokument32 SeitenLecture08 160425Anonymous 3G7tikAAdNoch keine Bewertungen