Das könnte Ihnen auch gefallen
- Atmega168/328-Arduino Pin Mapping: ShareDokument3 SeitenAtmega168/328-Arduino Pin Mapping: ShareGustavo CircelliNoch keine Bewertungen
- Kit Se Sensores ArduinoDokument42 SeitenKit Se Sensores ArduinoOmar Tintilay100% (1)
- Kit Se Sensores - ArduinoDokument13 SeitenKit Se Sensores - ArduinomarceloNoch keine Bewertungen
- DVP Ss ManualDokument13 SeitenDVP Ss ManualGustavo CircelliNoch keine Bewertungen
- L293D Motor Driver DatasheetDokument14 SeitenL293D Motor Driver DatasheetAnkit Daftery100% (3)
- DVP Ss ManualDokument459 SeitenDVP Ss ManualjoaokalatecNoch keine Bewertungen
- Guia Rapida Nixzen Configurar Internet DVR Edvr SeriesDokument2 SeitenGuia Rapida Nixzen Configurar Internet DVR Edvr SeriesGustavo CircelliNoch keine Bewertungen
- documentoLibreriaJavaArduino2 7Dokument15 SeitendocumentoLibreriaJavaArduino2 7Gustavo CircelliNoch keine Bewertungen
- Usbdii ManualDokument18 SeitenUsbdii ManualGustavo CircelliNoch keine Bewertungen
- Tc2004a 01Dokument18 SeitenTc2004a 01Gustavo CircelliNoch keine Bewertungen
- DTMFDokument3 SeitenDTMFGustavo CircelliNoch keine Bewertungen
- AC PWM Dimmer For Arduino (With Pictures)Dokument17 SeitenAC PWM Dimmer For Arduino (With Pictures)Gustavo CircelliNoch keine Bewertungen
- rc5 HDokument11 Seitenrc5 HGustavo CircelliNoch keine Bewertungen
- DimerDokument9 SeitenDimerGustavo CircelliNoch keine Bewertungen
- Hardware ChapterDokument50 SeitenHardware ChapterGustavo CircelliNoch keine Bewertungen
- Tuorial Xc8 InternetDokument35 SeitenTuorial Xc8 InternetGustavo CircelliNoch keine Bewertungen
- USB HID 01163aDokument26 SeitenUSB HID 01163aGustavo Circelli100% (1)
- HMICnnection DeltaDokument136 SeitenHMICnnection DeltaramdarkmasterNoch keine Bewertungen
- Chapter 2Dokument3 SeitenChapter 2Gustavo CircelliNoch keine Bewertungen
- HMICnnection DeltaDokument136 SeitenHMICnnection DeltaramdarkmasterNoch keine Bewertungen
- FATEK - Win Pro Ladder Simulator ManualDokument10 SeitenFATEK - Win Pro Ladder Simulator Manualjomisefer100% (2)
- Chapter 1Dokument16 SeitenChapter 1Eduardo AlvearNoch keine Bewertungen
- Resumen VariablesDokument3 SeitenResumen VariablesGustavo CircelliNoch keine Bewertungen
- Fatek PLC1Dokument20 SeitenFatek PLC1Engr Dil BagoroNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Dubai Municipality RequirementsDokument1 SeiteDubai Municipality RequirementsmaheshbandhamNoch keine Bewertungen
- BMS-HSS-F-113 - Lift Plan Rev 03Dokument11 SeitenBMS-HSS-F-113 - Lift Plan Rev 03Fariz SafarullaNoch keine Bewertungen
- CHAPTER 7: Benchmark Test ResultsDokument10 SeitenCHAPTER 7: Benchmark Test Resultsnapoleon_velasc3617Noch keine Bewertungen
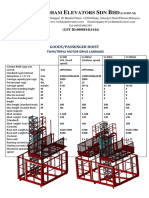
- Au GP1012 PDFDokument1 SeiteAu GP1012 PDFAkmalNoch keine Bewertungen
- Surface Roughness by Different Processing MethodsDokument1 SeiteSurface Roughness by Different Processing Methodsapi-3848892100% (1)
- Lecture 2Dokument23 SeitenLecture 2Sherif HelmyNoch keine Bewertungen
- Working Principle of Diesel EngineDokument30 SeitenWorking Principle of Diesel EngineShahzaibUsmanNoch keine Bewertungen
- Mhi (Humicool Industrial) : Industrial Evaporative Cooler / HumidifierDokument2 SeitenMhi (Humicool Industrial) : Industrial Evaporative Cooler / HumidifierGraham GunnerNoch keine Bewertungen
- Ips e PR 850 PDFDokument73 SeitenIps e PR 850 PDFdeyanshu7Noch keine Bewertungen
- EMG 2014 Mechanics of Machines II July 2014 Class WorkDokument3 SeitenEMG 2014 Mechanics of Machines II July 2014 Class WorkCharles OndiekiNoch keine Bewertungen
- ASTM B 69 Rolled ZN - 1998Dokument4 SeitenASTM B 69 Rolled ZN - 1998ecsuperalNoch keine Bewertungen
- Electrically Controlled Deluge Valve With Remote Reset Model FP 400Y - 3UDokument4 SeitenElectrically Controlled Deluge Valve With Remote Reset Model FP 400Y - 3Upedro torresNoch keine Bewertungen
- Vibration Applications of Vibrating ScreensDokument15 SeitenVibration Applications of Vibrating Screensamoli001100% (2)
- Reuse of Textile e Uent Treatment Plant Sludge in Building MaterialsDokument7 SeitenReuse of Textile e Uent Treatment Plant Sludge in Building MaterialsPriya PinkyNoch keine Bewertungen
- P091 067 UmDokument208 SeitenP091 067 UmBojan MarkovićNoch keine Bewertungen
- Uni - 02-0056-Q24063, YPFB Andina SA, 901-042-059-001 - 15h30m - 08122022Dokument7 SeitenUni - 02-0056-Q24063, YPFB Andina SA, 901-042-059-001 - 15h30m - 08122022josecordova2014Noch keine Bewertungen
- OmniSwitch10KHWBoilerplateRev1 5aDokument28 SeitenOmniSwitch10KHWBoilerplateRev1 5aVirat ParmarNoch keine Bewertungen
- DSR Cabos SinteticosDokument28 SeitenDSR Cabos SinteticosFabian Andres CelyNoch keine Bewertungen
- Mini-Excavators: Breaking New GroundDokument7 SeitenMini-Excavators: Breaking New GrounddongNoch keine Bewertungen
- Astm C117 PDFDokument2 SeitenAstm C117 PDFDrinar EvanNoch keine Bewertungen
- Flocon MC11: Membrane Cleaner For Organics and ParticulatesDokument2 SeitenFlocon MC11: Membrane Cleaner For Organics and ParticulatesCyrilDepalomaNoch keine Bewertungen
- 036 Siga-UmDokument6 Seiten036 Siga-UmzezohomeNoch keine Bewertungen
- Architecture Ebook Outstanding Wood Buildings - CWCDokument28 SeitenArchitecture Ebook Outstanding Wood Buildings - CWCAc Arquitetos Associados50% (2)
- Draft SOP For Usage of Tree PrunerDokument2 SeitenDraft SOP For Usage of Tree PrunerAkhilesh Kumar Singh100% (1)
- Unix Important QuestionsDokument3 SeitenUnix Important QuestionsNeo DragonNoch keine Bewertungen
- Steel Structures - GeneralDokument16 SeitenSteel Structures - Generalonur gunesNoch keine Bewertungen
- SC200 RevDokument2 SeitenSC200 RevAshraf MuhtarNoch keine Bewertungen
- 111 - New 48v Battery ChargerDokument14 Seiten111 - New 48v Battery Chargersaurabhjerps231221Noch keine Bewertungen
- Gear Can Be DefinedDokument31 SeitenGear Can Be Definedasisha mostNoch keine Bewertungen
- M04 - L01 - Student GuideDokument9 SeitenM04 - L01 - Student GuideShreyasNoch keine Bewertungen