Das könnte Ihnen auch gefallen
- Institution of Structural Engineers Part 3 Exam: Paul MartinDokument20 SeitenInstitution of Structural Engineers Part 3 Exam: Paul MartinparamsandhuNoch keine Bewertungen
- Practical Stress Analysis With Finite Elements (2 Edition) Finite Elements (2 Edition)Dokument20 SeitenPractical Stress Analysis With Finite Elements (2 Edition) Finite Elements (2 Edition)Ricardo ColosimoNoch keine Bewertungen
- MacNeal & Harder - Standard Problems FE AccuracyDokument18 SeitenMacNeal & Harder - Standard Problems FE AccuracyRm1262Noch keine Bewertungen
- Nafems Fea Webinar Feb 09Dokument88 SeitenNafems Fea Webinar Feb 09OscadL100% (1)
- ANSYS TutorialDokument20 SeitenANSYS Tutorialaekathir75% (4)
- Total NAS102Dokument363 SeitenTotal NAS102Alejandro Palacios MadridNoch keine Bewertungen
- Integral Concrete Bridge EC2 - 2010Dokument98 SeitenIntegral Concrete Bridge EC2 - 2010paramsandhu100% (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Pri Istructe Q&ADokument1 SeitePri Istructe Q&AparamsandhuNoch keine Bewertungen
- Liquid Sloshing in ContainersDokument192 SeitenLiquid Sloshing in Containerstgvnayagam100% (3)
- Scilab Ninja: Module 3: Classical Loopshaping DesignDokument12 SeitenScilab Ninja: Module 3: Classical Loopshaping Designorg25grNoch keine Bewertungen
- Current Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlDokument10 SeitenCurrent Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlAnushya RavikumarNoch keine Bewertungen
- A Fuzzy Inference System To Voltage/Var Control in Dms - Distribution Management SystemDokument6 SeitenA Fuzzy Inference System To Voltage/Var Control in Dms - Distribution Management SystemBogdan VicolNoch keine Bewertungen
- Koi Sap 2009Dokument6 SeitenKoi Sap 2009farhan beighNoch keine Bewertungen
- Project Report Designing Position Control System: Abu Dhabi UniversityDokument13 SeitenProject Report Designing Position Control System: Abu Dhabi UniversityMohammed ShifulNoch keine Bewertungen
- Synergetic ControlDokument13 SeitenSynergetic Controlrostamkola1229Noch keine Bewertungen
- Isma'09 62649 PDFDokument6 SeitenIsma'09 62649 PDFVignesh RamakrishnanNoch keine Bewertungen
- Linear Quadratic Regulator Controller For Magnetic Levitation SystemDokument4 SeitenLinear Quadratic Regulator Controller For Magnetic Levitation SystemKhethanNoch keine Bewertungen
- Homework 1:: NACA 4-Digit Airfoils Analysis Using The Discrete Vortex MethodDokument8 SeitenHomework 1:: NACA 4-Digit Airfoils Analysis Using The Discrete Vortex MethodvictorNoch keine Bewertungen
- Fractional Order PID Control of Rotor Suspension by Active Magnetic BearingsDokument31 SeitenFractional Order PID Control of Rotor Suspension by Active Magnetic BearingsNguyen Van QuyenNoch keine Bewertungen
- EMS: Network Analysis FunctionsDokument10 SeitenEMS: Network Analysis FunctionsAjit KumarNoch keine Bewertungen
- Commande San Modele Robot A 2dllDokument18 SeitenCommande San Modele Robot A 2dllElleuch DorsafNoch keine Bewertungen
- Lecture 02 MEE41103 Mathematical Models of Systems IDokument43 SeitenLecture 02 MEE41103 Mathematical Models of Systems IMohamed HatimNoch keine Bewertungen
- An Introduction To Nonlinear Model Predictive ControlDokument23 SeitenAn Introduction To Nonlinear Model Predictive ControlsaeedNoch keine Bewertungen
- Tr-Cse-04-006Dokument15 SeitenTr-Cse-04-006Sebastian ReyesNoch keine Bewertungen
- Lecture 01-Intro. Cont.Dokument20 SeitenLecture 01-Intro. Cont.Reagan TorbiNoch keine Bewertungen
- Lab Report Rotary CompleteDokument22 SeitenLab Report Rotary CompleteSyed Farid100% (1)
- INCISCOS Buck Boost PSODokument7 SeitenINCISCOS Buck Boost PSOPaul EcheverríaNoch keine Bewertungen
- Second Order Sliding Mode Control of Underactuated Mechanical Systems I: Local Stabilization With Application To An Inverted PendulumDokument15 SeitenSecond Order Sliding Mode Control of Underactuated Mechanical Systems I: Local Stabilization With Application To An Inverted PendulumVandana TakNoch keine Bewertungen
- Distributed Model Predictive Control: IEEE Control Systems Magazine February 2002Dokument10 SeitenDistributed Model Predictive Control: IEEE Control Systems Magazine February 2002Huu Phuoc TranNoch keine Bewertungen
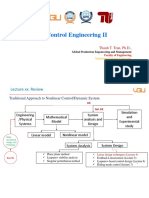
- Control Engineering II: Thanh T. Tran, PH.D.Dokument36 SeitenControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiNoch keine Bewertungen
- Adaptive Stabilization and Tracking Control of A Nonholonomic Mobile Robot WithDokument8 SeitenAdaptive Stabilization and Tracking Control of A Nonholonomic Mobile Robot Withhind90Noch keine Bewertungen
- Behavioral Modeling Methods for Switched-Capacitor Σ∆ ModulatorsDokument13 SeitenBehavioral Modeling Methods for Switched-Capacitor Σ∆ Modulatorstung001Noch keine Bewertungen
- Analysis of Oscillations With Eigenanalysis andDokument8 SeitenAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNoch keine Bewertungen
- Friction Compensation A Double Inverted Pendulum: Stons, CT FST, P.ODokument6 SeitenFriction Compensation A Double Inverted Pendulum: Stons, CT FST, P.Oمحمد المهندسNoch keine Bewertungen
- An Active Disturbance Rejection Based Approach To Vibration Suppression in Two-Inertia SystemsDokument6 SeitenAn Active Disturbance Rejection Based Approach To Vibration Suppression in Two-Inertia SystemsMobile SunNoch keine Bewertungen
- Lmi MethodDokument38 SeitenLmi Methodlokesh1308Noch keine Bewertungen
- Robustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopDokument8 SeitenRobustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopMuhammad Mazhar BashirNoch keine Bewertungen
- Analysis and Control Design of Two Cascaded BoostDokument6 SeitenAnalysis and Control Design of Two Cascaded BoostTamilselvanNoch keine Bewertungen
- Control Law Comparison For Attitude Control of A SpacecraftDokument7 SeitenControl Law Comparison For Attitude Control of A Spacecrafthossein_AUNoch keine Bewertungen
- LQR and LQGDokument13 SeitenLQR and LQGkomaladeviNoch keine Bewertungen
- Simulation of Speed Control of Brushless DC Motor, With Fuzzy Logic ControllerDokument6 SeitenSimulation of Speed Control of Brushless DC Motor, With Fuzzy Logic ControllerPradeepAgrahariNoch keine Bewertungen
- Kamyar's Chinese Conference To JournalDokument4 SeitenKamyar's Chinese Conference To JournalgkreuginerajNoch keine Bewertungen
- Aldeen IEE-CTA 1992Dokument10 SeitenAldeen IEE-CTA 1992Abhishek RanjanNoch keine Bewertungen
- An Abstract Model of Routing in Mobile Ad Hoc Networks: Cong Yuan, Jonathan Billington, Joern FreiheitDokument15 SeitenAn Abstract Model of Routing in Mobile Ad Hoc Networks: Cong Yuan, Jonathan Billington, Joern Freiheitakshayasridhar1991Noch keine Bewertungen
- Direct Torque Control For Induction Motor Drives: A Model Predictive Control Approach Based On FeasibilityDokument17 SeitenDirect Torque Control For Induction Motor Drives: A Model Predictive Control Approach Based On FeasibilityDharmender Vishwakarma Brahmin PanchalNoch keine Bewertungen
- SWING UP AND STABILIZATION OF ROTARY INVERTED PENDULUM Jirı MertlDokument6 SeitenSWING UP AND STABILIZATION OF ROTARY INVERTED PENDULUM Jirı MertldiemtrieuNoch keine Bewertungen
- Pod Using HVDCDokument31 SeitenPod Using HVDCRajeev JhaNoch keine Bewertungen
- Cercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumDokument8 SeitenCercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumFanica ScarlatNoch keine Bewertungen
- º Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyDokument11 Seitenº Y'& Yyy Y YYY Yyyyyy Yyyy Y Yyy Y Yyyyyyy YY Yyyyyy Y Y Y Yy Yy Yyy Y Y Yyyyyyyyyyy !"yy &yyy Yyyyy +yyyyyyyShaik Saheb ShaikNoch keine Bewertungen
- Visakh SeminarDokument20 SeitenVisakh SeminariagooNoch keine Bewertungen
- Observability of Power Systems Based On Fast Pseudorank Calculation of Sparse Sensitivity MatricesDokument6 SeitenObservability of Power Systems Based On Fast Pseudorank Calculation of Sparse Sensitivity Matricesjaved shaikh chaandNoch keine Bewertungen
- Design of State Feedback Controller and Observer Using MatlabDokument6 SeitenDesign of State Feedback Controller and Observer Using MatlabYashwant MosesNoch keine Bewertungen
- Motor Position Control Lab: University at BuffaloDokument12 SeitenMotor Position Control Lab: University at BuffaloGoran MiljkovicNoch keine Bewertungen
- Motor Pos Con LabDokument12 SeitenMotor Pos Con LabGoran MiljkovicNoch keine Bewertungen
- Model Predictive Control Design: New Trends and Tools: Alberto BemporadDokument6 SeitenModel Predictive Control Design: New Trends and Tools: Alberto BemporadNguyễn Xuân KhảiNoch keine Bewertungen
- Matecconf Iceice2016 02064Dokument5 SeitenMatecconf Iceice2016 02064Đông Ngô ThanhNoch keine Bewertungen
- Fuzzy Tracking Control Based On H Infinity For Performance For Permanent Magnet Synchronous MachineDokument7 SeitenFuzzy Tracking Control Based On H Infinity For Performance For Permanent Magnet Synchronous MachinemezianeNoch keine Bewertungen
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDokument22 SeitenInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidNoch keine Bewertungen
- Local Control of Multiple Module DC-DC Converters: Pradeep S. Shenoy and Philip T. KreinDokument6 SeitenLocal Control of Multiple Module DC-DC Converters: Pradeep S. Shenoy and Philip T. KreinDipanjan DasNoch keine Bewertungen
- Department: Lab ManualDokument36 SeitenDepartment: Lab ManualPragun SinghalNoch keine Bewertungen
- Revised Paper vs12Dokument16 SeitenRevised Paper vs12Long Trần ĐứcNoch keine Bewertungen
- Linear Dynamic System Analyses With Creo SimulateDokument71 SeitenLinear Dynamic System Analyses With Creo SimulateMagdalenaNoch keine Bewertungen
- Implementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeDokument23 SeitenImplementation of Induction Motor Drive Control Schemes in MATLAB/Simulink/dSPACE Environment For Educational PurposeMos CraciunNoch keine Bewertungen
- Sliding Mode Control PHD ThesisDokument7 SeitenSliding Mode Control PHD Thesisaflodnyqkefbbm100% (1)
- Non-Linear Predictive Control of A DC-to-DC ConverterDokument5 SeitenNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueNoch keine Bewertungen
- Constrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterDokument24 SeitenConstrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterShaheer DurraniNoch keine Bewertungen
- Model Predictive Control of Voltages in Active Distribution NetworksDokument10 SeitenModel Predictive Control of Voltages in Active Distribution NetworksDiogo MarujoNoch keine Bewertungen
- Speed Control: OF Induction Motors Using Novel Fuzzy-Sliding Mode StructureDokument6 SeitenSpeed Control: OF Induction Motors Using Novel Fuzzy-Sliding Mode StructureMulyadi IkhlasNoch keine Bewertungen
- Section 4: Structural Analysis and EvaluationDokument32 SeitenSection 4: Structural Analysis and EvaluationKangho WonNoch keine Bewertungen
- Part-1 Sandhu Harpreet Singh R1 For SubmissionDokument67 SeitenPart-1 Sandhu Harpreet Singh R1 For SubmissionparamsandhuNoch keine Bewertungen
- PDFDokument28 SeitenPDFparamsandhuNoch keine Bewertungen
- Section 4: Structural Analysis and EvaluationDokument32 SeitenSection 4: Structural Analysis and EvaluationKangho WonNoch keine Bewertungen
- Combined Lowres PAC OptDokument8 SeitenCombined Lowres PAC OptparamsandhuNoch keine Bewertungen
- PDFDokument28 SeitenPDFparamsandhuNoch keine Bewertungen
- Approximate Analysis of Suspension Bridges With Cables in Inclined PlanesDokument16 SeitenApproximate Analysis of Suspension Bridges With Cables in Inclined PlanesparamsandhuNoch keine Bewertungen
- Approximate AnalysisDokument1 SeiteApproximate AnalysisTeresa WestNoch keine Bewertungen
- Cable Stayed Bridge Over Vistula River in Plock. Dynamic Analysis and Site Test-ZoltowskiDokument8 SeitenCable Stayed Bridge Over Vistula River in Plock. Dynamic Analysis and Site Test-ZoltowskiparamsandhuNoch keine Bewertungen
- Aerodynamic Investigation of Cable-Stayed Bridge With 2-Edge GirderDokument5 SeitenAerodynamic Investigation of Cable-Stayed Bridge With 2-Edge GirderparamsandhuNoch keine Bewertungen
- Added Mass BasicDokument11 SeitenAdded Mass Basicshahriar840Noch keine Bewertungen
- FEM in Geotech EngineeringDokument21 SeitenFEM in Geotech EngineeringWesead KawayapanikNoch keine Bewertungen
- Finite Element LecturesDokument153 SeitenFinite Element LecturesLemi Chala Beyene100% (1)
- Session07 ECS Werkhausen PDFDokument30 SeitenSession07 ECS Werkhausen PDFsuhas110Noch keine Bewertungen
- Finite Element Method in Structural MechanicsDokument5 SeitenFinite Element Method in Structural MechanicsPaolo GoducoNoch keine Bewertungen
- Yeong Chin Machine RY Industries Co., L TDDokument24 SeitenYeong Chin Machine RY Industries Co., L TDAbhishek VelagaNoch keine Bewertungen
- A Common Algorithm For Various ParametriDokument6 SeitenA Common Algorithm For Various ParametriSabapathy KrishnakumarNoch keine Bewertungen
- Decreator: Generation of Design ElementsDokument39 SeitenDecreator: Generation of Design ElementsChris LumyNoch keine Bewertungen
- FEM Project Report Group13Dokument16 SeitenFEM Project Report Group13nimishk92Noch keine Bewertungen
- Analysis and Weight Reduction of A Tractors Front AxleDokument18 SeitenAnalysis and Weight Reduction of A Tractors Front AxletgvnayagamNoch keine Bewertungen
- II. Plate ElementsDokument9 SeitenII. Plate Elementsyared sitotawNoch keine Bewertungen
- Fulltext01 PDFDokument105 SeitenFulltext01 PDFPrasen ChaudhariNoch keine Bewertungen
- Punching PDFDokument160 SeitenPunching PDFjovanaNoch keine Bewertungen
- RACE 2011 ProceedingDokument680 SeitenRACE 2011 Proceedingrace2590Noch keine Bewertungen
- Unified First-Principles Ship Structural Design Based On The Maestro MethodologyDokument17 SeitenUnified First-Principles Ship Structural Design Based On The Maestro MethodologyMahdiNoch keine Bewertungen
- A New Finite Element Model Analysis For Permanent Magnet Synchronous Machine Stator FaultDokument13 SeitenA New Finite Element Model Analysis For Permanent Magnet Synchronous Machine Stator FaultNikhil DoiphodeNoch keine Bewertungen
- Curriculum M Tech Structural Construction Engineering 2019Dokument27 SeitenCurriculum M Tech Structural Construction Engineering 2019SumanNoch keine Bewertungen
- Novel - Virtual - Seismic - Assessment - of - A - MV - Primary - Switchgear - Based - On - The - New - IEC-TS 62271-210Dokument6 SeitenNovel - Virtual - Seismic - Assessment - of - A - MV - Primary - Switchgear - Based - On - The - New - IEC-TS 62271-210Alexandre MandettaNoch keine Bewertungen
- M TECH Structural and Construction PDFDokument55 SeitenM TECH Structural and Construction PDFniteshNoch keine Bewertungen
- Slab Ingot Mould Design CDNA09087ENC - 001Dokument284 SeitenSlab Ingot Mould Design CDNA09087ENC - 001emregnes0% (1)
- Elements of DesignDokument6 SeitenElements of Designbatros1Noch keine Bewertungen
- Specialisation - Design Engineering (ME 2)Dokument2 SeitenSpecialisation - Design Engineering (ME 2)Shivendu AnandNoch keine Bewertungen
- Scientific ReportsDokument11 SeitenScientific ReportsTestNoch keine Bewertungen
- Unit 3 FEM Bar & Beam Elements PDFDokument14 SeitenUnit 3 FEM Bar & Beam Elements PDFHarsh PatelNoch keine Bewertungen